A History of Laser Scanning, Part 2: the Later Phase of Industrial and Heritage Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Article a New Calibration Method for Commercial RGB-D Sensors Walid
Article A New Calibration Method for Commercial RGB-D Sensors Walid Darwish 1, Shenjun Tang 1,2,3, Wenbin Li 1 and Wu Chen 1,* 1 Department of Land Surveying & Geo-Informatics, The Hong Kong Polytechnic University, Hung Hom 999077, Hong Kong, China; [email protected] (W.D.); [email protected] (S.T.); [email protected] (W.L.) 2 State Key Laboratory of Information Engineering in Surveying Mapping and Remote Sensing, Wuhan University, 129 Luoyu Road, Wuhan 430079, China 3 Shenzhen Key Laboratory of Spatial Smart Sensing and Services & The Key Laboratory for Geo-Environment Monitoring of Coastal Zone of the National Administration of Surveying, Mapping and GeoInformation, Shenzhen University, Shenzhen 518060, China * Correspondence: [email protected]; Tel.: +852-2766-5969 Academic Editors: Zhizhong Kang, Jonathan Li and Cheng Wang Received: 1 March 2017; Accepted: 20 May 2017; Published: 24 May 2017 Abstract: Commercial RGB-D sensors such as Kinect and Structure Sensors have been widely used in the game industry, where geometric fidelity is not of utmost importance. For applications in which high quality 3D is required, i.e., 3D building models of centimeter-level accuracy, accurate and reliable calibrations of these sensors are required. This paper presents a new model for calibrating the depth measurements of RGB-D sensors based on the structured light concept. Additionally, a new automatic method is proposed for the calibration of all RGB-D parameters, including internal calibration parameters for all cameras, the baseline between the infrared and RGB cameras, and the depth error model. -

Automatic Reconstruction of As-Built Building Information Models from Laser-Scanned Point Clouds: a Review of Related Techniques
Automation in Construction 19 (2010) 829–843 Contents lists available at ScienceDirect Automation in Construction journal homepage: www.elsevier.com/locate/autcon Review Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques Pingbo Tang a, Daniel Huber b,⁎, Burcu Akinci c, Robert Lipman d, Alan Lytle e a Western Michigan University, Civil and Construction Engineering Department, Kalamazoo, MI 49008, United States b Carnegie Mellon University, Robotics Institute, 4105 Newell-Simon Hall, Pittsburgh, PA 15213, United States c Carnegie Mellon University, Civil and Environmental Engineering Department, Porter Hall 123K, Pittsburgh, PA 15213, United States d National Institute of Standards and Technology, 100 Bureau Drive, Stop 8630, Gaithersburg, MD 20899, United States e National Institute of Standards and Technology, 100 Bureau Drive, Stop 8611, Gaithersburg, MD 20899, United States article info abstract Article history: Building information models (BIMs) are maturing as a new paradigm for storing and exchanging knowledge Accepted 7 June 2010 about a facility. BIMs constructed from a CAD model do not generally capture details of a facility as it was actually built. Laser scanners can be used to capture dense 3D measurements of a facility's as-built condition Keywords: and the resulting point cloud can be manually processed to create an as-built BIM — a time-consuming, Building information models subjective, and error-prone process that could benefit significantly from automation. This article surveys Building reconstruction techniques developed in civil engineering and computer science that can be utilized to automate the process Laser scanners of creating as-built BIMs. -
Iphone X Teardown Guide ID: 98975 - Draft: 2021-04-28
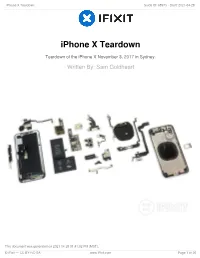
iPhone X Teardown Guide ID: 98975 - Draft: 2021-04-28 iPhone X Teardown Teardown of the iPhone X November 3, 2017 in Sydney. Written By: Sam Goldheart This document was generated on 2021-04-28 01:41:52 PM (MST). © iFixit — CC BY-NC-SA www.iFixit.com Page 1 of 26 iPhone X Teardown Guide ID: 98975 - Draft: 2021-04-28 INTRODUCTION Ten years ago, Apple introduced the very first iPhone, and changed the world. Today, we're taking apart Apple's 18th iteration—the iPhone X. With its rounded edges and edge-to-edge display, we're sure this is the iPhone Steve imagined all of those years ago—but now that his dream is realized, will it be as influential as the first? Time will tell, but for now we'll be doing our part to help you decide. Join us as we open Apple's crown jewel to see what makes it shine. A big thanks to Circuitwise for hosting our teardown down under, Creative Electron for X-ray imagery, and TechInsights for IC ID. It's serendipitous that we're in Sydney, because we've got an Australia store now. As we learn more, we'll be posting on Facebook, Instagram and Twitter. We've got a newsletter too if you're the email type. TOOLS: P2 Pentalobe Screwdriver iPhone (1) Tri-point Y000 Screwdriver (1) Spudger (1) Halberd Spudger (1) Tweezers (1) iOpener (1) Jimmy (1) iSclack (1) Phillips #000 Screwdriver (1) This document was generated on 2021-04-28 01:41:52 PM (MST). -

Corporate Recruiters Survey 2011 General Data Report
2011 General Data Report The Corporate Recruiters Survey is a product of the Graduate Management Admission Council® (GMAC®), a global nonprofit education organization of leading graduate business schools and the owner of the Graduate Management Admission Test® (GMAT®). The GMAT exam is an important part of the admissions process for more than 5,000 graduate management programs around the world. GMAC is dedicated to creating access to and disseminating information about graduate management education; these schools and others rely on the Council as the premier provider of reliable data about the graduate management education industry. This year, GMAC partnered with the European Foundation for Management Development (EFMD) and MBA Career Services Council (MBA CSC) in developing questions for the survey and increasing business school participation worldwide. EFMD is an international membership organization based in Brussels, Belgium. With more than 650 member organizations from academia, business, public service, and consultancy in 75 countries, EFMD provides a unique forum for information, research, networking, and debate on innovation and best practice in management development. EFMD is recognized globally as an accreditation body of quality in management education and has established accreditation services for business schools and business school programs, corporate universities, and technology-enhanced learning programs. The MBA CSC is an international professional association representing individuals in the field of MBA career services and recruiting. The MBA CSC provides a forum for the exchange of ideas and information and addresses issues unique to the needs of MBA career services and recruiting professionals. MBA CSC also provides professional development and networking opportunities for its members and develops and promotes its Standards for Reporting MBA Employment Statistics. -

CLONES, BONES and TWILIGHT ZONES: PROTECTING the DIGITAL PERSONA of the QUICK, the DEAD and the IMAGINARY by Josephj
CLONES, BONES AND TWILIGHT ZONES: PROTECTING THE DIGITAL PERSONA OF THE QUICK, THE DEAD AND THE IMAGINARY By JosephJ. Beard' ABSTRACT This article explores a developing technology-the creation of digi- tal replicas of individuals, both living and dead, as well as the creation of totally imaginary humans. The article examines the various laws, includ- ing copyright, sui generis, right of publicity and trademark, that may be employed to prevent the creation, duplication and exploitation of digital replicas of individuals as well as to prevent unauthorized alteration of ex- isting images of a person. With respect to totally imaginary digital hu- mans, the article addresses the issue of whether such virtual humans should be treated like real humans or simply as highly sophisticated forms of animated cartoon characters. TABLE OF CONTENTS I. IN TR O DU C T IO N ................................................................................................ 1166 II. CLONES: DIGITAL REPLICAS OF LIVING INDIVIDUALS ........................ 1171 A. Preventing the Unauthorized Creation or Duplication of a Digital Clone ...1171 1. PhysicalAppearance ............................................................................ 1172 a) The D irect A pproach ...................................................................... 1172 i) The T echnology ....................................................................... 1172 ii) Copyright ................................................................................. 1176 iii) Sui generis Protection -

Neal Notes - Home
WEBINARS WHITEPAPERS SOLUTION CENTERS JOBS BOARD WHAT'S NEW EDUCATION NEWS MAGAZINES JOURNALS CONFERENCES SUBMISSIONS ABOUT HOME CLOUD BIG DATA MOBILE NETWORKING SECURITY SOFTWARE INSIGHTSINSIGHTS HOT TOPICS Neal Notes - Home Latest Posts Israeli Semiconductor Industry Continues to Thrive, but Some Clouds May Be on Horizon Neal Leavitt MAY 30, 2014 14:58 PM A- A A+ Back in 1974, Dov Frohman, one of Intel’s first employees and the inventor of EPROM, erasable programmable read only memory, decided to leave Silicon Valley and return to Israel, his adopted home since 1949. Frohman was charged with helping Intel establish a small chip design center in Haifa, which at the time, was Intel’s first outside the U.S. The rest, as the cliché goes, is history. In a little over a generation, the Israeli semiconductor industry has grown to now employ more than 20,000; annual revenues are about US $5 billion. Intel, for instance, now has about 9,900 employees in Israel and is planning to invest almost $6 billion in upgrading its Kiryat Gat fab facility. In fact, since 1974, Intel has invested about $10.8 billion in the Israeli semiconductor industry. “We’ve exported goods worth $35 billion most from our production centers in Kiryat Gat and Jerusalem,” said Intel VP and Intel Israel CEO Maxine Fassberg. Sol Gradman is editor of TapeOut, a publication covering the semiconductor industry, and also chairs ChipEx, the country’s largest annual semiconductor/microelectronics conference. Gradman said Israel’s semiconductor industry today comprises three types of companies – fabless, multinational design centers, and fabs. -

Humana.Mente Complete Issue 26.Pdf
EDITORIAL MANAGER: DUCCIO MANETTI - UNIVERSITY OF FLORENCE Editorial EXECUTIVE DIRECTOR: SILVANO ZIPOLI CAIANI - UNIVERSITY OF MILAN VICE DIRECTOR: MARCO FENICI - UNIVERSITY OF SIENA Board INTERNATIONAL EDITORIAL BOARD JOHN BELL - UNIVERSITY OF WESTERN ONTARIO GIOVANNI BONIOLO - INSTITUTE OF MOLECULAR ONCOLOGY FOUNDATION MARIA LUISA DALLA CHIARA - UNIVERSITY OF FLORENCE DIMITRI D'ANDREA - UNIVERSITY OF FLORENCE BERNARDINO FANTINI - UNIVERSITÉ DE GENÈVE LUCIANO FLORIDI - UNIVERSITY OF OXFORD MASSIMO INGUSCIO - EUROPEAN LABORATORY FOR NON-LINEAR SPECTROSCOPY GEORGE LAKOFF - UNIVERSITY OF CALIFORNIA, BERKELEY PAOLO PARRINI - UNIVERSITY OF FLORENCE ALBERTO PERUZZI - UNIVERSITY OF FLORENCE JEAN PETITOT - CREA, CENTRE DE RECHERCHE EN ÉPISTÉMOLOGIE APPLIQUÉE CORRADO SINIGAGLIA - UNIVERSITY OF MILAN BAS C. VAN FRAASSEN - SAN FRANCISCO STATE UNIVERSITY CONSULTING EDITORS CARLO GABBANI - UNIVERSITY OF FLORENCE ROBERTA LANFREDINI - UNIVERSITY OF FLORENCE MARCO SALUCCI - UNIVERSITY OF FLORENCE ELENA ACUTI - UNIVERSITY OF FLORENCE MATTEO BORRI - UNIVERSITÉ DE GENÈVE ROBERTO CIUNI - UNIVERSITY OF DELFT Editorial SCILLA BELLUCCI, LAURA BERITELLI, RICCARDO FURI, ALICE GIULIANI, STEFANO LICCIOLI, UMBERTO MAIONCHI Staff HUMANA.MENTE - QUARTERLY JOURNAL OF PHILOSOPHY TABLE OF CONTENTS INTRODUCTION Fiorella Battaglia, Antonio Carnevale Epistemological and Moral Problems with Human Enhancement III PAPERS Volker Gerhardt Technology as a Medium of Ethics and Culture 1 Nikil Mukerji, Julian Nida-Rümelin Towards a Moderate Stance on Human Enhancement 17 Christopher -

M.A. Maciver's Dissertation
The computational neuroethology of weakly electric fish body modeling, motion analysis, and sensory signal estimation R s R s C R s i C s 1 Z = + X prey + + s 1/ Rp 1/ Xp 1/ Zs −ρ ρ E ⋅r 1 p / w δφ(r) = fish a3 3 + ρ ρ r 1 2 p / w − t − t = 1/ v + + − 1/ v + vt vt−1e g(1 mt )(1 e ) nt − t = 1/ w wt wt−1e = − st H(vt wt ) = + ∆ ⋅ wt wt w st Malcolm Angus MacIver THE COMPUTATIONAL NEUROETHOLOGY OF WEAKLY ELECTRIC FISH: BODY MODELING, MOTION ANALYSIS, AND SENSORY SIGNAL ESTIMATION BY MALCOLM ANGUS MACIVER B.Sc., University of Toronto, 1991 M.A., University of Toronto, 1992 THESIS Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Neuroscience in the Graduate College of the University of Illinois at Urbana-Champaign, 2001 Urbana, Illinois c Copyright by Malcolm Angus MacIver, 2001 ABSTRACT Animals actively influence the content and quality of sensory information they acquire through the positioning of peripheral sensory surfaces. Investigation of how the body and brain work together for sensory acquisition is hindered by 1) the limited number of techniques for tracking sensory surfaces, few of which provide data on the position of the entire body surface, and by 2) our inability to measure the thousands of sensory afferents stimulated during behav- ior. I present research on sensory acquisition in weakly electric fish of the genus Apteronotus, where I overcame the first barrier by developing a markerless tracking system and have de- ployed a computational approach toward overcoming the second barrier. -

Apple Strategy Teardown
Apple Strategy Teardown The maverick of personal computing is looking for its next big thing in spaces like healthcare, AR, and autonomous cars, all while keeping its lead in consumer hardware. With an uphill battle in AI, slowing growth in smartphones, and its fingers in so many pies, can Apple reinvent itself for a third time? In many ways, Apple remains a company made in the image of Steve Jobs: iconoclastic and fiercely product focused. But today, Apple is at a crossroads. Under CEO Tim Cook, Apple’s ability to seize on emerging technology raises many new questions. Primarily, what’s next for Apple? Looking for the next wave, Apple is clearly expanding into augmented reality and wearables with the Apple Watch AirPods wireless headphones. Though delayed, Apple’s HomePod speaker system is poised to expand Siri’s footprint into the home and serve as a competitor to Amazon’s blockbuster Echo device and accompanying virtual assistant Alexa. But the next “big one” — a success and growth driver on the scale of the iPhone — has not yet been determined. Will it be augmented reality, healthcare, wearables? Or something else entirely? Apple is famously secretive, and a cloud of hearsay and gossip surrounds the company’s every move. Apple is believed to be working on augmented reality headsets, connected car software, transformative healthcare devices and apps, as well as smart home tech, and new machine learning applications. We dug through Apple’s trove of patents, acquisitions, earnings calls, recent product releases, and organizational structure for concrete hints at how the company will approach its next self-reinvention. -

Reliability Engineering for Long-Term Deployment of Autonomous Service Robots
UNIVERSITY OF CALIFORNIA SAN DIEGO Reliability Engineering for Long-term Deployment of Autonomous Service Robots A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Computer Science by Shengye Wang Committee in charge: Professor Henrik I. Christensen, Chair Professor Thomas R. Bewley Professor Ryan Kastner Professor Scott R. Klemmer Professor Jishen Zhao 2020 Copyright Shengye Wang, 2020 All rights reserved. The dissertation of Shengye Wang is approved, and it is ac- ceptable in quality and form for publication on microfilm and electronically: Chair University of California San Diego 2020 iii DEDICATION To my parents who have always supported me. iv EPIGRAPH Failure is instructive. The person who really thinks learns quite as much from his failures as from his successes. — John Dewey v TABLE OF CONTENTS Signature Page....................................... iii Dedication.......................................... iv Epigraph...........................................v Table of Contents...................................... vi List of Figures........................................ ix List of Tables........................................ xii Acknowledgements..................................... xiii Vita............................................. xv Abstract of the Dissertation................................. xvi Chapter 1 Introduction..................................1 1.1 Motivation...............................2 1.2 Thesis Statement...........................3 1.3 Problem Scope............................3 -

The Iphone X Is Here! Here's the Fillin' Inside That Glass Sandwich: A11
The iPhone X is here! Here's the fillin' inside that glass sandwich: A11 "Bionic" chip with neural engine and embedded M11 motion coprocessor 5.8 inch "all-screen" OLED multitouch Super Retina HD display with 2436 × 1125-pixel resolution (458 ppi) Dual 12 MP cameras (wide-angle and telephoto) with ƒ/1.8 and ƒ/2.4 apertures and OIS 7 MP TrueDepth camera with ƒ/2.2 aperture, 1080p HD video recording, and Face ID Support for fast-charge and Qi wireless charging Our A1865 global unit has broad cellular band support as well as 802.11a/b/g/n/ac Wi‑Fi w/MIMO + Bluetooth 5.0 + NFC. The iPhone has come a long way in ten years—so long, in fact, that the design has cycled back a bit, and this iPhone looks more like the original than we've seen in a long time. Except of course for that camera bump, and shiny stainless steel rim, and glass back, and Lightning connector... As was the case with the iPhone 8 earlier this year, Apple has banished the unsightly (and environmentally responsible) regulatory markings from the back of the iPhone X. Jony finally has the featureless smooth backplane you know he's always wanted. Hopefully these phones still make it to recyclers without the hint and don't get dumped in the trash. Before we dive in blindly, let's get some 10-ray X-ray recon from our friends at Creative Electron. Here's what we found: Not one, but two battery cells. That's a first in an iPhone! A super-tiny logic board footprint. -

Exposing Corruption in Progressive Rock: a Semiotic Analysis of Gentle Giant’S the Power and the Glory
University of Kentucky UKnowledge Theses and Dissertations--Music Music 2019 EXPOSING CORRUPTION IN PROGRESSIVE ROCK: A SEMIOTIC ANALYSIS OF GENTLE GIANT’S THE POWER AND THE GLORY Robert Jacob Sivy University of Kentucky, [email protected] Digital Object Identifier: https://doi.org/10.13023/etd.2019.459 Right click to open a feedback form in a new tab to let us know how this document benefits ou.y Recommended Citation Sivy, Robert Jacob, "EXPOSING CORRUPTION IN PROGRESSIVE ROCK: A SEMIOTIC ANALYSIS OF GENTLE GIANT’S THE POWER AND THE GLORY" (2019). Theses and Dissertations--Music. 149. https://uknowledge.uky.edu/music_etds/149 This Doctoral Dissertation is brought to you for free and open access by the Music at UKnowledge. It has been accepted for inclusion in Theses and Dissertations--Music by an authorized administrator of UKnowledge. For more information, please contact [email protected]. STUDENT AGREEMENT: I represent that my thesis or dissertation and abstract are my original work. Proper attribution has been given to all outside sources. I understand that I am solely responsible for obtaining any needed copyright permissions. I have obtained needed written permission statement(s) from the owner(s) of each third-party copyrighted matter to be included in my work, allowing electronic distribution (if such use is not permitted by the fair use doctrine) which will be submitted to UKnowledge as Additional File. I hereby grant to The University of Kentucky and its agents the irrevocable, non-exclusive, and royalty-free license to archive and make accessible my work in whole or in part in all forms of media, now or hereafter known.