Operational and Safety Considerations for Light Rail DC Traction Electrification System Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Interstate Commerce Commission Washington
INTERSTATE COMMERCE COMMISSION WASHINGTON REPORT NO. 3374 PACIFIC ELECTRIC RAILWAY COMPANY IN BE ACCIDENT AT LOS ANGELES, CALIF., ON OCTOBER 10, 1950 - 2 - Report No. 3374 SUMMARY Date: October 10, 1950 Railroad: Pacific Electric Lo cation: Los Angeles, Calif. Kind of accident: Rear-end collision Trains involved; Freight Passenger Train numbers: Extra 1611 North 2113 Engine numbers: Electric locomo tive 1611 Consists: 2 muitiple-uelt 10 cars, caboose passenger cars Estimated speeds: 10 m. p h, Standing ft Operation: Timetable and operating rules Tracks: Four; tangent; ] percent descending grade northward Weather: Dense fog Time: 6:11 a. m. Casualties: 50 injured Cause: Failure properly to control speed of the following train in accordance with flagman's instructions - 3 - INTERSTATE COMMERCE COMMISSION REPORT NO, 3374 IN THE MATTER OF MAKING ACCIDENT INVESTIGATION REPORTS UNDER THE ACCIDENT REPORTS ACT OF MAY 6, 1910. PACIFIC ELECTRIC RAILWAY COMPANY January 5, 1951 Accident at Los Angeles, Calif., on October 10, 1950, caused by failure properly to control the speed of the following train in accordance with flagman's instructions. 1 REPORT OF THE COMMISSION PATTERSON, Commissioner: On October 10, 1950, there was a rear-end collision between a freight train and a passenger train on the Pacific Electric Railway at Los Angeles, Calif., which resulted in the injury of 48 passengers and 2 employees. This accident was investigated in conjunction with a representative of the Railroad Commission of the State of California. 1 Under authority of section 17 (2) of the Interstate Com merce Act the above-entitled proceeding was referred by the Commission to Commissioner Patterson for consideration and disposition. -

Minutes of Claremore Public Works Authority Meeting Council Chambers, City Hall, 104 S
MINUTES OF CLAREMORE PUBLIC WORKS AUTHORITY MEETING COUNCIL CHAMBERS, CITY HALL, 104 S. MUSKOGEE, CLAREMORE, OKLAHOMA MARCH 03, 2008 CALL TO ORDER Meeting called to order by Mayor Brant Shallenburger at 6:00 P.M. ROLL CALL Nan Pope called roll. The following were: Present: Brant Shallenburger, Buddy Robertson, Tony Mullenger, Flo Guthrie, Mick Webber, Terry Chase, Tom Lehman, Paula Watson Absent: Don Myers Staff Present: City Manager Troy Powell, Nan Pope, Serena Kauk, Matt Mueller, Randy Elliott, Cassie Sowers, Phil Stowell, Steve Lett, Daryl Golbek, Joe Kays, Gene Edwards, Tim Miller, Tamryn Cluck, Mark Dowler Pledge of Allegiance by all. Invocation by James Graham, Verdigris United Methodist Church. ACCEPTANCE OF AGENDA Motion by Mullenger, second by Lehman that the agenda for the regular CPWA meeting of March 03, 2008, be approved as written. 8 yes, Mullenger, Lehman, Robertson, Guthrie, Shallenburger, Webber, Chase, Watson. ITEMS UNFORESEEN AT THE TIME AGENDA WAS POSTED None CALL TO THE PUBLIC None CURRENT BUSINESS Motion by Mullenger, second by Lehman to approve the following consent items: (a) Minutes of Claremore Public Works Authority meeting on February 18, 2008, as printed. (b) All claims as printed. (c) Approve budget supplement for upgrading the electric distribution system and adding an additional Substation for the new Oklahoma Plaza Development - $586,985 - Leasehold improvements to new project number assignment. (Serena Kauk) (d) Approve budget supplement for purchase of an additional concrete control house for new Substation #5 for Oklahoma Plaza Development - $93,946 - Leasehold improvements to new project number assignment. (Serena Kauk) (e) Approve budget supplement for electrical engineering contract with Ledbetter, Corner and Associates for engineering design phase for Substation #5 - Oklahoma Plaza Development - $198,488 - Leasehold improvements to new project number assignment. -

Los Angeles Transportation Transit History – South LA
Los Angeles Transportation Transit History – South LA Matthew Barrett Metro Transportation Research Library, Archive & Public Records - metro.net/library Transportation Research Library & Archive • Originally the library of the Los • Transportation research library for Angeles Railway (1895-1945), employees, consultants, students, and intended to serve as both academics, other government public outreach and an agencies and the general public. employee resource. • Partner of the National • Repository of federally funded Transportation Library, member of transportation research starting Transportation Knowledge in 1971. Networks, and affiliate of the National Academies’ Transportation • Began computer cataloging into Research Board (TRB). OCLC’s World Catalog using Library of Congress Subject • Largest transit operator-owned Headings and honoring library, forth largest transportation interlibrary loan requests from library collection after U.C. outside institutions in 1978. Berkeley, Northwestern University and the U.S. DOT’s Volpe Center. • Archive of Los Angeles transit history from 1873-present. • Member of Getty/USC’s L.A. as Subject forum. Accessing the Library • Online: metro.net/library – Library Catalog librarycat.metro.net – Daily aggregated transportation news headlines: headlines.metroprimaryresources.info – Highlights of current and historical documents in our collection: metroprimaryresources.info – Photos: flickr.com/metrolibraryarchive – Film/Video: youtube/metrolibrarian – Social Media: facebook, twitter, tumblr, google+, -

Electric Trolleybuses for the Lacmta's Bus System
ARIELI ASSOCIATES MANAGEMENT, OPERATIONS AND ENGINEERING CONSULTING Report No. 1302 ELECTRIC TROLLEYBUSES FOR THE LACMTA’S BUS SYSTEM PREPARED FOR THE ADVANCED TRANSIT VEHICLE CONSORTIUM UNDER CONTRACT NO. OP 3320661 - 2 - EXECUTIVE SUMMARY California Air Resources Board (CARB) Adopted Urban Bus Transit Rule for 2010 Emission Standards requires that MTA, starting in 2010, set aside 15% of all bus purchases to acquire Zero Emission Vehicles (ZEVs). Currently, none of the buses in the MTA’s inventory can be classified as ZEV, nor there are any transit buses [defined as propelled by an internal combustion engine (ICE) powered by either diesel or alternate fuels] available on the market that can be classified as ZEV. The California emission standards are well ahead of those for the rest of the United States and the manufacturers will not develop suitable vehicles on their own unless incentivized by large customers such as LACMTA. Failure to meet the 2010 Emission Standards will result in regulatory punitive fines and potentially litigation. It is important to note here that this is not the first time that the subject of incorporating electric trolleybuses into the MTA’s bus system comes before the MTA Board of Directors. In the 1992 30-Year Integrated Transportation Plan, electric trolleybuses were the preferred solution to meet CARB air regulations. The Plan provided for 18 routes, 300 miles of overhead wires and 400 peak electric trolleybuses by 2004 to be increased to 1,100 peak electric trolleybuses by 2010. Eventually, the Board voted to terminate the project. After reviewing the various technologies that might qualify as zero emissions under CARB rule, the report focuses on electric trolleybuses as the technology of choice. -

The Neighborly Substation the Neighborly Substation Electricity, Zoning, and Urban Design
MANHATTAN INSTITUTE CENTER FORTHE RETHINKING DEVELOPMENT NEIGHBORLY SUBstATION Hope Cohen 2008 er B ecem D THE NEIGHBORLY SUBstATION THE NEIGHBORLY SUBstATION Electricity, Zoning, and Urban Design Hope Cohen Deputy Director Center for Rethinking Development Manhattan Institute In 1879, the remarkable thing about Edison’s new lightbulb was that it didn’t burst into flames as soon as it was lit. That disposed of the first key problem of the electrical age: how to confine and tame electricity to the point where it could be usefully integrated into offices, homes, and every corner of daily life. Edison then designed and built six twenty-seven-ton, hundred-kilowatt “Jumbo” Engine-Driven Dynamos, deployed them in lower Manhattan, and the rest is history. “We will make electric light so cheap,” Edison promised, “that only the rich will be able to burn candles.” There was more taming to come first, however. An electrical fire caused by faulty wiring seriously FOREWORD damaged the library at one of Edison’s early installations—J. P. Morgan’s Madison Avenue brownstone. Fast-forward to the massive blackout of August 2003. Batteries and standby generators kicked in to keep trading alive on the New York Stock Exchange and the NASDAQ. But the Amex failed to open—it had backup generators for the trading-floor computers but depended on Consolidated Edison to cool them, so that they wouldn’t melt into puddles of silicon. Banks kept their ATM-control computers running at their central offices, but most of the ATMs themselves went dead. Cell-phone service deteriorated fast, because soaring call volumes quickly drained the cell- tower backup batteries. -
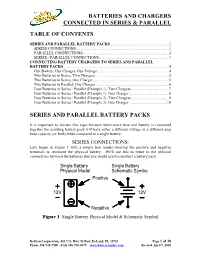
Connecting Batteries and Chargers in Series and Parallel
BATTERIES AND CHARGERS CONNECTED IN SERIES & PARALLEL TABLE OF CONTENTS SERIES AND PARALLEL BATTERY PACKS ...........................................................1 SERIES CONNECTIONS: .............................................................................................1 PARALLEL CONNECTIONS: ......................................................................................2 SERIES / PARALLEL CONNECTIONS:......................................................................3 CONNECTING BATTERY CHARGERS TO SERIES AND PARALLEL BATTERY PACKS...........................................................................................................4 One Battery, One Charger, One Voltage.........................................................................4 Two Batteries in Series, Two Chargers...........................................................................5 Two Batteries in Series, One Charger.............................................................................5 Two Batteries in Parallel, One Charger ..........................................................................6 Four Batteries in Series / Parallel (Example 1), Two Chargers ......................................7 Four Batteries in Series / Parallel (Example 1), One Charger ........................................8 Four Batteries in Series / Parallel (Example 2), Two Chargers ......................................9 Four Batteries in Series / Parallel (Example 2), One Charger ......................................10 SERIES AND PARALLEL BATTERY -

A) B) C) D) 1. Which Is an SI Unit for Work Done on an Object? A) Kg•M/S
1. Which is an SI unit for work done on an object? 10. Which is an acceptable unit for impulse? A) B) A) N•m B) J/s C) J•s D) kg•m/s C) D) 11. Using dimensional analysis, show that the expression has the same units as acceleration. [Show all the 2. Which combination of fundamental units can be used to express energy? steps used to arrive at your answer.] A) kg•m/s B) kg•m2/s 12. Which quantity and unit are correctly paired? 2 2 2 C) kg•m/s D) kg•m /s A) 3. A joule is equivalent to a B) A) N•m B) N•s C) N/m D) N/s C) 4. A force of 1 newton is equivalent to 1 A) B) D) C) D) 13. Which two quantities are measured in the same units? 5. Which two quantities can be expressed using the same A) mechanical energy and heat units? B) energy and power A) energy and force C) momentum and work B) impulse and force D) work and power C) momentum and energy 14. Which is a derived unit? D) impulse and momentum A) meter B) second 6. Which pair of quantities can be expressed using the same C) kilogram D) Newton units? 15. Which combination of fundamental unit can be used to A) work and kinetic energy express the weight of an object? B) power and momentum A) kilogram/second C) impulse and potential energy B) kilogram•meter D) acceleration and weight C) kilogram•meter/second 7. -

Rural Service
ONE-WAY FARES / Tarifas Sencillas Effective SEPTEMBER 1, 2019 DIRECTORY / Directorio Exact fare, please / Favor de pagar la cantidad exacta 511 MTS Information & Trip Planning or/ó Regional MTS Información y planeo de viaje (619) 233-3004 RURAL SERVICE (all zones eliminated) (Todas zonas eliminadas) (619) 234-5005 TTY/TDD (teletype for hearing impaired) or/ó Adult / Adulto $8.00 Teletipo para sordos (888) 722-4889 Youth (ages 6-18)* Jóvenes (edades 6-18)* $8.00 InfoExpress (24-hour info via Touch-Tone phone) (619) 685-4900 Jacumba Hot Springs - El Cajon Senior/Disabled/Medicare* $4.00 Información las 24 horas (via teléfono de teclas) 888 via Alpine Personas Mayores/con Discapacidades/Medicare* Customer Service / Suggestions (619) 557-4555 Children 5 & under* FREE Servicio al cliente / Sugerencias Niños de 5 años o menos* GRATIS Borrego Springs - El Cajon MTS Security 891 via Shelter Valley / Ramona MONTHLY/30-DAY PASSES / Pases mensuales/30 días (619) 595-4960 MTS Seguridad Premium Regional Lost & Found Borrego Springs - El Cajon (619) 233-3004 Adult / Adulto $100.00 Objetos extraviados 892 via Ranchita / Ramona Youth (ages 6-18)* $32.00 (619) 234-1060 Jóvenes (edades 6-18)* Transit Store 12th & Imperial Transit Center Morena Village - El Cajon Senior/Disabled/Medicare* M–F 8am–5pm 894 via Tecate / Campo Personas Mayores/con Discapacidades/Medicare* $32.00 For MTS online trip planning sdmts.com *Proof of eligibility required. Senior Eligibility: Age 65+ or born on or before September 1, 1959. Planifi cación de viajes por Internet TROLLEY *Se requiere verificación de elegibilidad. Elegibilidad para Personas Mayores: Edad 65+ o 09/19 CONNECTIONS nacido en o antes del 1 de septiembre, 1959. -

Union Station Area Connections
metro.net Union Station Area Connections 1 Destinations Lines Stops Scale One Unit: /4 Mile Chinese Historical Lincoln/Cypress Station Society Chinatown Alhambra 76, 78, 79, 378, 485 B CL 5 8 7 BE Heritage and Altadena via Lake 485 7 A 1 Metro Local Stop RN Visitors Center Arcadia 78, 79, 378 B C AR T Metro Local and D S Artesia Transit Center n Metro Silver Line n J 1 S A RapidL Stop Y T G Baldwin Park Metro Silver Line n to 190 N Å K A W I ST I Chung King Chinese R E Beverly Hills Metro Purple Line o to 20, 720; 704 5 Metro Rapid Line UM Bamboo R Los Angeles S N I Cultural P EY T D Road Art Plaza State S W S Bob Hope Airport (BUR) ÅÍ 94, 794, Metrolink Å, Amtrak Í W 2 N A BA T C Center D Galleries HU M N Metro Silver Line Stop S NG B Historical 110 D K o E I O A U Boyle Heights Metro Gold Line , 30, 68, 770 B R N CP T G C O G T L A N T S I N Park N A Mandarin K G 5 7 I N Broadway 30, 40, 42, 730, 740, 745 A O N FIN G L E IN L N N Metro Silver Line G W N B U Y Plaza P R H E Burbank Å 94, 96, 794 W 2 O C I E E Paci>c L L N C Y D T T E Cal Poly Pomona Metro Silver Line n to 190, 194 K Metro Rail StationT A S M E JU L S W Alliance N Y U G J R Y I W F N and Entrance G L n S W W Y Carson Metro Silver Line to 246 J Medical Y N G U R B O N E T M A I R O L N P A N I 5 6 O E T Center U L Y Century City 704, 728, CE534 E 3 O W R E D S D S M L A E E W I T Metro Red LineA C M U S E IN O O W G A N Y U S City Terrace 70, 71 E B C I P L V O F LE L T n N M Covina Å Metro Silver Line to 190 K Metro Purple Line G L IN E A S Crenshaw District 40, 42, 740 -
CHAPTER 9 – RAILWAY ELECTRIFICATION Chapter
CHAPTER 9 – RAILWAY ELECTRIFICATION Chapter RAILWAY ELECTRIFICATION 9.1 Introduction espite the competition of airplanes, buses, Dtrucks and cars, trains still play a major transportation role in society, filling specific markets such as high-speed and non-high-speed intercity passenger service, heavy haul of minerals and freight, urban light rail systems and commuter rail. This chapter presents an Figure 9-1 Overhead High Speed Catenary - Courtesy of LTK, Inc. introduction to electrification of rail systems. It is intended to provide a historical perspective and an overview of typical design principles, construction practice, and maintenance considerations. Those interested in learning more are invited to review AREMA’s Manual for Railway Engineering, Chapter 33, Electrical Energy Utilization, and Chapter 17, High Speed Rail Systems, which contain sections devoted to electrification power supplies, traction power systems studies and guidelines for the design of overhead contact systems. 9.2 Development of Motive Power for Railways The earliest recorded tramway served a mine in Germany, beginning in about 1550. The tramway was developed because the rolling resistance of wheels on rails was much less 395 ©2003 AREMA® CHAPTER 9 – RAILWAY ELECTRIFICATION CDoes not create possible electrical safety hazards to the public due to the presence of the bare conductors of the contact system. When the cost of diesel fuel was 9 cents a gallon and the supply seemed unlimited, United States railways were not interested in alternative methods of propulsion. Railway electrification interest peaks during times of uncertainty in the energy industry. When fuel rose to 34 cents per gallon and the oil embargos occurred, much effort was expended studying alternatives to hydrocarbon fuels. -

Specific Plan for the Development of Pacific Electric Right -Of Way- 1974
SPECIFIC PLAN FOR THE DEVELOPMENT OF PACIFIC ELECTRIC RIGHT - ®F -WAY Prepared by the City of Seal Beach Planning Department Robert S. Neprud, Planning Director Spring, 1974 Page 2 - City of Seal Beach Planning Department Specific Plan for the Development of Pacific Electric Right -of Way- 1974 Resolution No. 2362 A RESOLUTION OF THE CITY COUNCIL OF THE CITY OF SEAL BEACH ADOPTING A SPECIFIC PLAN FOR THE DEVELOPMENT OF THE PACIFIC ELECTRIC RIGHT -OF -WAY WHEREAS, in October of 1973 the City Council of the City of Seal Beach adopted a revised Land Use Element to the City's General Plan; and WHEREAS, as an implementation measure of said Plan, a Specific Plan has been prepared for the Pacific Electric right -of way- prescribing that the area be developed as an open space greenbelt with limited public facilities and parking; and WHEREAS, the Specific Plan has been reviewed and approved by both the Redevelopment Agency and Planning Commission; and WHEREAS, the implementation of the Specific Plan will enhance the quality of the environment and contribute to the general welfare of the community; NOW, THEREFORE, BE IT RESOLVED that the City Council of the City of Seal Beach does hereby adopt the Specific Plan for the Development of the Pacific Electric right -of way- subject to the following conditions: I. That the intersection at Main Street and Electric Avenue form a typical four -way intersection described as Intersection " B" in the Plan. 2. That thirty -nine ( 39) parking spaces be provided at the intersection of Main Street and Electric Avenue. -

Railroad Electrification Activity a Summary Report
P6 ' 8 3 IMWI f T £ A / 0 A b - ^ Q / ^ 3 RAILROAD ELECTRIFICATION ACTIVITY A SUMMARY REPORT: 1980-1981 Prepared by Alice E. Kidder Ebon Research Systems 1118 9th St., N.W. Washington, D.C. 20001 Prepared for U.S. Department of Transportation Federal Railroad Administration Passenger Systems and Facilities, KRD-22 400 Seventh St., SW Washington, DC 20590 Contract # OTFR53-81-C-00226 April, 1982 -t f • i 13 - Electrification j t >.• • ' - ■ *-- *« wW^Tilf ~i fiSi*'. I’nV r‘‘rt J r Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. r FRA/ORD-82/53 4. Title and Subtitle 5. Report Date RAILROAD ELECTRIFICATION ACTIVITY: A SUMMARY January, 1982 r REPORT, 1980-1981 6. Performing Orgonizotion Code 8. Performing Orgonizotion Report No. 7. Author's) r Alice E. Kidder FRA-1 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) f Ebon Research Systems 11. Controct or Grant No. 603 Southlawn Lane DTFR53-81-C-00226 Rockville, MD 20850 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Final Report, June 1980- - June, 1981 14. Sponsoring Agency Code DOT/FRA/RRD-22 15. Supplementary Notes 16. Abstract This report reviews the status of railway electrification in North America and selected countries worldwide, for the period June, 1980 through June, 1981. Included in the report are updates on the extent of construction of electrifi cation; research completed on feasibility studies and technical developments in engineering and design? a summary of cost-effectiveness studies which have explored the economics of railroad electrification during the period in question; a review of activities of U.S.