Chapter 1 Overview of Hydraulics and Objective of the Notes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

DEPARTMENT of ENGINEERING Course CE 41800 – Hydraulics
DEPARTMENT OF ENGINEERING Course CE 41800 – Hydraulics Engineering Type of Course Required for Civil Engineering Program Catalog Description Sources and distribution of water in urban environment, including surface reservoir requirements, utilization of groundwater, and distribution systems. Analysis of sewer systems and drainage courses for the disposal of both wastewater and storm water. Pumps and lift stations. Urban planning and storm drainage practice. Credits 3 Contact Hours 3 Prerequisite Courses CE 31800 Corequisite Courses None Prerequisites by Fluid Mechanics Topics Textbook Larry Mays, Water Resources Engineering, John Wiley Publishing Company, Current Edition. Course Objectives Students will understand and be able to apply fundamental concepts and techniques of hydraulics and hydrology in the analysis, design, and operation of water resources systems. Course Outcomes Students who successfully complete this course will be able to: 1. Become familiar with different water resources terminology like hydrology, ground water, hydraulics of pipelines and open channel. [a] 2. Understand and be able to use the energy and momentum equations. [a] 3. Analyze flow in closed pipes, and design and selection of pipes including sizes. [a, c, e] 4. Understand pumps classification and be able to develop a system curve used in pump selection. [a, c, e] 5. Design and select pumps (single or multiple) for different hydraulic applications. [a, c, e] Department Syllabus CE – 41800 Page | 1 6. Become familiar with open channel cross sections, hydrostatic pressure distribution and Manning’s law. [a] 7. Determine water surface profiles for gradually varied flow in open channels. [a, e] 8. Familiar with drainage systems and wastewater sources and flow rates. -

Intelligent Hydraulics in New Dimensions. Industrial Hydraulics from Rexroth You Have Our Full Support
Intelligent Hydraulics in New Dimensions. Industrial Hydraulics from Rexroth You Have Our Full Support. Our Dedication is to Your Success With its extensive product range and outstanding application expertise, Rexroth is the technological and market leader in industrial hydraulics. You benefit from the world’s broadest range of standard products, application-adapted products, and special cus- tomized solutions for industrial hydraulics. Teams operating worldwide engineer and deliver complete turnkey systems. Rexroth is the ideal partner for the development of highly efficient plant and machinery—from the initial contact through to commissioning and for the application’s entire life cycle. Extra quality is ensured by Rexroth’s internal quality standards that go beyond the ISO standards and extends our performance specifications consistently to the upper limits. It is precisely in international large-scale projects and research projects that the company’s financial strength forms a firm foun- dation. All over the world, Rexroth can provide you with skilled advice, support, and exceptional service—with its own distribution and service companies in 80 countries. Hydraulics 3 If You Expect Quality, You’re in Good Hands With Rexroth As the world’s leading supplier of industrial hydraulics, Rexroth occupies a prominent position with its parts, systems and specially adapted electronic components. With Rexroth, builders of machines and plant have access to products that consistently set new standards of perfor- mance and quality. Rexroth’s Industrial Hydraulics division located in Bethlehem, Pennsylvania designs and manufactures high-performance, high-productivity hydraulic power units, systems and com- ponents using world-class technologies. Rexroth supports applications in the machine tool and plastics processing machinery, metal forming, civil engineering, power genera- tion, test machinery and simulation, entertainment, presses, automotive, transportation, marine and offshore technology, and wood processing markets. -

Design of Hydraulic Structures 89, Albertson & Kia (Eds) © 1989 Balkema, Rotterdam
P AP-SEi5 PROCEEDINGS OF THE SECOND INTERNATIONAL SYMPOSIUM ON DESIGN OF HYDRAULIC STRUCTURES / FORT COLLINS, COLORADO / 26-29 JUNE 1989 Design of Hydraulic ructures 89 HYDRAULICS BRANCH St OFFICIAL FILE COPY Edited by MAURICE L.ALBERTSON Department of Civil Engineering, Colorado State University, Fort Collins, USA T RAHIM A.KIA Mahab G. Consulting Eng., Tehran, Iran resently: Department of Civil Engineering, Colorado State University, ort Collins, USA OFFPRINT (3— Bureau of Reclamation HYDRAULICS BRANCH RI WHEN BORROWED RETURN PROMPTLY A.A.BALKEMA / ROTTERDAM / BROOKFIELD / 1989 Design of Hydraulic Structures 89, Albertson & Kia (eds) © 1989 Balkema, Rotterdam. ISBN 90 6191 898 7 The role of hydraulic modeling in development of innovative spillway concepts Philip H.Burgi Bureau of Reclamation, Denver, Colo., USA ABSTRACT: The use of hydraulic models to develop and verify the intricate design of waterways to pass flood flows has been closely associated with the development of hydraulic structures over the past 50 years. Since the mid-30's, the Bureau of Reclamation has used laboratory models to develop spillways for large dams such as Hoover, Grand Coulee, Glen Canyon, Yellowtail, and Morrow Point Dams. Documented reports and generalized design criteria have been developed to summarize the results of these investigations. In recent years, Reclamation has developed various innovative spillway concepts which have resulted in cost effective designs for hydraulic structures. This paper will summarize recent laboratory investigations for labyrinth, stepped, and fuse plug spillway concepts as well as retrofit concepts using aerators on spillways and downstream slope protection systems for overtopping low-head embankments. INTRODUCTION Physical model studies are used to investigate the anticipated performance of hydraulic structures. -
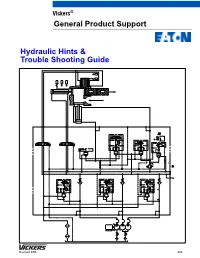
Hydraulic Hints & Trouble Shooting Guide
Vickers® General Product Support Hydraulic Hints & Trouble Shooting Guide Revised 8/96 694 General Hydraulic Hints . 3 Troubleshooting Guide & Maintenance Hints . 4 Chart 1 Excessive Noise . 5 Chart 2 Excessive Heat . 6 Chart 3 Incorrect Flow . 7 Chart 4 Incorrect Pressure . 8 Chart 5 Faulty Operation . 9 Quiet Hydraulics . 10 Contamination Control . 11 Hints on Maintenance of Hydraulic Fluid in the System. 13 Aeration . 14 Leakage Control . 15 Hydraulic Fluid and Temperature Recommendations for Industrial Machinery. 16 Hydraulic Fluid and Temperature Recommendations for Mobile Hydraulic Systems. 19 Oil Viscosity Recommendations . 20 Pump Test Procedure for Evaluation of Antiwear Fluids for Mobile Systems. 21 Oil Flow Velocity in Tubing . 23 Pipe Sizes and Pressure Ratings . 24 Preparation of Pipes, Tubes and Fittings Before Installation in a Hydraulic System. 25 ISO/ANSI Basic Symbols for Fluid Power Equipment and Systems. 26 Conversion Factors . 29 Hydraulic Formulas . 29 2 General Hydraulic Hints Good Assembly Pipes Tubing Do’s And Don’ts Practices Iron and steel pipes were the first kinds Don’t take heavy cuts on thin wall tubing of plumbing used to conduct fluid with a tubing cutter. Use light cuts to Most important – cleanliness. between system components. At prevent deformation of the tube end. If All openings in the reservoir should be present, pipe is the least expensive way the tube end is out or round, a greater to go when assembling a system. possibility of a poor connection exists. sealed after cleaning. Seamless steel pipe is recommended No grinding or welding operations for use in hydraulic systems with the Ream tubing only for removal of burrs. -

Hydraulics Manual Glossary G - 3
Glossary G - 1 GLOSSARY OF HIGHWAY-RELATED DRAINAGE TERMS (Reprinted from the 1999 edition of the American Association of State Highway and Transportation Officials Model Drainage Manual) G.1 Introduction This Glossary is divided into three parts: · Introduction, · Glossary, and · References. It is not intended that all the terms in this Glossary be rigorously accurate or complete. Realistically, this is impossible. Depending on the circumstance, a particular term may have several meanings; this can never change. The primary purpose of this Glossary is to define the terms found in the Highway Drainage Guidelines and Model Drainage Manual in a manner that makes them easier to interpret and understand. A lesser purpose is to provide a compendium of terms that will be useful for both the novice as well as the more experienced hydraulics engineer. This Glossary may also help those who are unfamiliar with highway drainage design to become more understanding and appreciative of this complex science as well as facilitate communication between the highway hydraulics engineer and others. Where readily available, the source of a definition has been referenced. For clarity or format purposes, cited definitions may have some additional verbiage contained in double brackets [ ]. Conversely, three “dots” (...) are used to indicate where some parts of a cited definition were eliminated. Also, as might be expected, different sources were found to use different hyphenation and terminology practices for the same words. Insignificant changes in this regard were made to some cited references and elsewhere to gain uniformity for the terms contained in this Glossary: as an example, “groundwater” vice “ground-water” or “ground water,” and “cross section area” vice “cross-sectional area.” Cited definitions were taken primarily from two sources: W.B. -

Basic Hydraulics and Components
Pub.ES-100-2 BASIC HYDRAULICSANDCOMPONENTS BASIC HYDRAULICS AND COMPONENTS OIL HYDRAULIC EQUIPMENT ■ Overseas Business Department Hamamatsucho Seiwa Bldg., 4-8, Shiba-Daimon 1-Chome, Minato-ku, Tokyo 105-0012 JAPAN TEL. +81-3-3432-2110 FAX. +81-3-3436-2344 Preface This book provides an introduction to hydraulics for those unfamiliar with hydraulic systems and components, such as new users, novice salespeople, and fresh recruits of hydraulics suppliers. To assist those people to learn hydraulics, this book offers the explanations in a simple way with illustrations, focusing on actual hydraulic applications. The first edition of the book was issued in 1986, and the last edition (Pub. JS-100-1A) was revised in 1995. In the ten years that have passed since then, this book has become partly out-of-date. As hydraulic technologies have advanced in recent years, SI units have become standard in the industrial world, and electro-hydraulic control systems and mechatronics equipment are commercially available. Considering these current circumstances, this book has been wholly revised to include SI units, modify descriptions, and change examples of hydraulic equipment. Conventional hydraulic devices are, however, still used in many hydraulic drive applications and are valuable in providing basic knowledge of hydraulics. Therefore, this edition follows the preceding edition in its general outline and key text. This book principally refers hydraulic products of Yuken Kogyo Co., Ltd. as example, but does mention some products of other companies, with their consent, for reference to equipment that should be understood. We acknowledge courtesy from those companies who have given us support for this textbook. -

16-1 Attachment 3 Glossary of Terminology for Hydraulics & Scour
Memo to Designers 16-1A • December 2017 LRFD SupersedesSupersedes MemoMemo toto DesignersDesigners 1-231-23 DatedDated OctoberOctober 20032003 Attachment 3 Glossary Of Terminology For Hydraulics & Scour Definitions (refer to AASHTO LRFD-BDS-CA Section 2.2) Common terminology has been defined below for easy reference. Abutment Scour Abutment scour is essentially a form of scour at a short contraction. Accordingly, scour is closely influenced by flow distribution through the short contraction and by turbulence generated and dispersed in the form of eddies and vortices, by flow entering the short contraction. Aggradation General and progressive buildup (long term) of the longitudinal profile of a channel bed due to sediment deposition. Backwater The increase in water surface elevation relative to its elevation occurring under natural channel and floodplain conditions. It is induced by a bridge or other structure that obstructs or constricts the free flow of water that occurs in a channel. Bank Protection: Engineering works for the purpose of protecting streambanks from erosion. Base Flood Discharge associated with the 100-year flood recurrence interval. Base floodplain Floodplain associated with the flood with a 100-year occurrence interval. Bedrock The solid rock exposed at the surface of the earth or overlain by soils and unconsolidated material. Bridge Waterway The cross-sectional area of a bridge opening available for flow, as measured below a specified stage and normal to the principal direction of flow. Bulking Increasing the water discharge to account for high concentrations of sediment in the flow. Channel Profile A plot of the stream channel elevations relative to distance separating them along the length of the channel that generally can be assumed as a channel gradient. -

Hydraulics Heroes
Hydraulics Heroes An introduction to five influential scientists, mathematicians and engineers who paved the way for modern hydraulics: our hydraulics heroes. www.hydraulicsonline.com Hydraulics Online e-book series: Sharing our knowledge of all things hydraulic About Hydraulics Online Hydraulics Online is a leading, award-winning, ISO 9001 accredited provider of customer-centric fluid power solutions to 130 countries and 24 sectors worldwide. Highly committed employees and happy customers are the bedrock of our business. Our success is built on quality and technical know-how and the fact that we are 100% independent – we provide truly unbiased advice and the most optimal solutions for our customers. Every time. RITISH B T E R G U S A T T I Q R E U H A L Y I T Hydraulics Heroes We invite you to meet five of our hydraulics heroes: Hydraulics Online e-book series: Benedetto Castelli (c.1577 – 1642) Sharing our knowledge of all things hydraulic Blaise Pascal (1623 – 1662) Joseph Bramah (1748 – 1814) Jean Léonard Marie Poiseuille (1799 – 1869) William Armstrong (1810 – 1900) Hydraulics Online e-book: Hydraulics Heroes P. 3 www.hydraulicsonline.com Benedetto Castelli Benedetto Castelli (c.1577 – 1642) is celebrated for his work in astronomy and hydraulics. His most celebrated work is Della Misura delle Acque Correnti – On the Measurement of Running Water – which was published in 1629. In this work, Castelli established the continuity principle, which is still central to all modern hydraulics. A supporter and colleague of Galileo, Benedetto was born the eldest of seven children of a wealthy landowner. It is not known exactly when he was born, but it is thought to be 1577 or 1578. -

Chapter 6 – Stream Hydraulics
United States Department of Part 654 Stream Restoration Design Agriculture National Engineering Handbook Natural Resources Conservation Service Chapter 6 Stream Hydraulics Chapter 6 Stream Hydraulics Part 654 National Engineering Handbook Issued August 2007 Cover photo: Stream hydraulics focus on bankfull frequencies, veloci- ties, and duration of flow, both for the current condition, as well as the condition anticipated with the project in place. Effects of vegetation are considered both in terms of protec- tion of the bank materials, as well as on changes in hydrau- lic roughness. Advisory Note Techniques and approaches contained in this handbook are not all-inclusive, nor universally applicable. Designing stream restorations requires appropriate training and experience, especially to identify conditions where various approaches, tools, and techniques are most applicable, as well as their limitations for design. Note also that prod- uct names are included only to show type and availability and do not constitute endorsement for their specific use. The U.S. Department of Agriculture (USDA) prohibits discrimination in all its programs and activities on the basis of race, color, national origin, age, disability, and where applicable, sex, marital status, familial status, parental status, religion, sexual orientation, genetic information, political beliefs, reprisal, or because all or a part of an individual’s income is derived from any public assistance program. (Not all prohibited bases apply to all programs.) Persons with disabilities who require alternative means for communication of program information (Braille, large print, audiotape, etc.) should contact USDA’s TARGET Center at (202) 720–2600 (voice and TDD). To file a com- plaint of discrimination, write to USDA, Director, Office of Civil Rights, 1400 Independence Avenue, SW., Washing- ton, DC 20250–9410, or call (800) 795–3272 (voice) or (202) 720–6382 (TDD). -
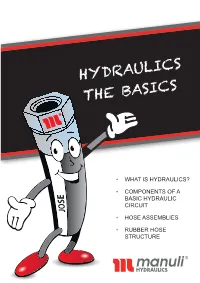
Hydraulics the Basics
HYDRAULICS THE BASICS • WHAT IS HYDRAULICS? • COMPONENTS OF A BASIC HYDRAULIC CIRCUIT • HOSE ASSEMBLIES • RUBBER HOSE STRUCTURE ING N R A HYDRAULICSW - THE BASICS 6 WHAT IS HYDRAULICS? BER At its most basic level, hydraulics is the generation, control EM M E R and transmission of power by the use of pressurised liquids. A hydraulic circuit is a system to supply energy by means of a liquid under pressure. NCE RE E F E COMPONENTSR OF A BASIC HYDRAULIC CIRCUIT PRESSURE DIRECTIONAL RELIEF CONTROL VALVE VALVE MOTORICKS TR & PUMP S P I T LOAD ACTUATOR RESERVOIR Direction of uid ow Fig. 1 - A simple hydraulic circuit MOTOR Sometimes referred to as a “prime mover”, this is an externally powered device (usually electrical) the purpose of which is to drive the pump. PUMP Converts the mechanical energy of the motor into fluid power, by drawing the hydraulic fluid out of the reservoir and sending it into the circuit. PRESSURE RELIEF VALVE This is a fundamental safety device which allows fluid to drain back into the reservoir if the pressure in the system exceeds a predetermined value. HYDRAULICS - THE BASICS DIRECTIONAL CONTROL VALVE 7 Allows the fluid from one or more sources to flow along different paths in order to control elements within the hydraulic circuit. Directional control valves come in various types with varying numbers of ports depending on the control requirements. ACTUATOR Hydraulic actuators convert the transmitted hydraulic power back into useful mechanical energy to move the load. The most common form of actuator used in hydraulic systems is a cylinder or linear actuator. -

Don't Go with the Flow! Identifying and Mitigating Hydraulic Hazards At
Don’t Go With the Flow! Identifying and Mitigating Hydraulic Hazards at Dams Paul Schweiger, P.E., Gannett Fleming, Inc. Steven Barfuss, P.E., Utah State University William Foos, CPP, PSP, Gannett Fleming, Inc. Greg Richards, P.E., Gannett Fleming, Inc. ABSTRACT Between 2015 and 2016 there were more than 100 documented drownings at dams in the United States, and many more near misses or serious incidents that almost led to tragedy. The increasing number of incidents from hydraulic hazards at dams is a disturbing trend. According to Dr. Bruce Tschantz, professor emeritus at the University of Tennessee and long-time researcher involved in monitoring incidents at dams, there have been more than nine times as many fatalities from hydraulic hazards at dams than there have been from dam failures over the past 35 years. Examination of these incidents shows that the vast majority were the result of transient hydraulic conditions that were not identified or addressed by the dam owner. In other words, the hazardous hydraulic condition did not normally occur at the dam, but occurred unexpectedly as a result of sudden operational or hydrologic circumstances. The purpose of this paper is to provide descriptions of the seven primary hydraulic hazards at dams that have resulted in loss of life along with actual incident examples. A brief discussion of effective strategies to mitigate each hydraulic hazard is also provided. When performing a hydraulic assessment at a dam site, considerations should be given to simulating flows which represent a reasonable worst-case scenario where the public or maintenance staff have interaction at the site. -

THE ROTARY HYDRAULIC PRESSURE MACHINE for VERY LOW HEAD HYDROPOWER SITES James SENIOR1 Patrick WIEMANN Gerald MÜLLER University of Southampton, U.K
THE ROTARY HYDRAULIC PRESSURE MACHINE FOR VERY LOW HEAD HYDROPOWER SITES James SENIOR1 Patrick WIEMANN Gerald MÜLLER University of Southampton, U.K. ABSTRACT This short paper introduces a novel energy converter, the Rotary Hydraulic Pressure Machine (RHPM). This machine has been specifically developed to exploit very low head hydropower sites where the fall height is less than 5m. The RHPM is described and a theory behind its operation is outlined. This is followed by scale model testing, the results of which are used to estimate the full- scale performance. This found that hydraulic efficiencies up to 80% can be achieved, and estimated flow capacities for a 2m head installation of up to 3.6m3/s per m width of machine. A case study demonstrates that the increased flow capacity and lower construction costs, compared to a traditional Zuppinger waterwheel installation, result in specific costs as low as 3000 €/kW installed capacity. This represents a significant improvement in very low head hydropower technology, making the economics more attractive to investors. 1. INTRODUCTION In the western world much of the large scale, high output hydropower sites have now been exploited. Within Europe the focus has therefore shifted to Small Hydro-Power; installations with power outputs below 10MW. The target is to achieve an additional 2.4GW of power generation from Small Hydro-Power plants by 2010, relative to the 2005 generation levels (European Commission 2007). Within this bracket are sites with ‘very low head’ which refers to sites where the vertical distance through which flowing water falls over structures or terrain is less than 5m.