Information to Users
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Fcc 397 Broadcast Midterm Report 20160331Aan
Federal Communications Commission Approved by OMB FOR FCC USE ONLY Washington, D.C. 20554 30600922 (September 2002) FCC 397 FOR COMMISSION USE ONLY BROADCAST MIDTERM REPORT FILE NO. 20160331AAN Legal Name of the Licensee TOWNSQUARE MEDIA OF EVANSVILLE/OWENSBORO, INC. Mailing Address 240 GREENWICH AVENUE City State or Country (if foreign address) Zip Code GREENWICH CT 06830 Telephone Number (include area code) EMail Address (if available) 2038610900 FCC Registration Number Facility ID Number Call Sign 0009024290 6871 WKDQ TYPE OF BROADCAST Commercial Broadcast Station Noncommercial Broadcast Station STATION: Radio Educational Radio TV Educational TV Low Power TV International Application Purpose New Program Report Amendment to Program Report List call sign and location of all stations included on this report. List commonly owned stations that share one or more employees. Also list stations operated by the licensee pursuant to a time brokerage agreement. Indicate on the table below which stations are operated pursuant to a time brokerage agreement. To the extent that licensees include stations operated pursuant to a time brokerage agreement on this report, responses or information provided in Sections I through III should take into consideration the licensee's EEO compliance efforts at brokered stations, as well as any other stations, included on this form. For purposes of this form, a station employment unit is a station or a group of commonly owned stations in the same market that share at least one employee. [Station List] Station List List call sign and location of all stations included on this report. List commonly owned stations that share one or more employees. -

Federal Communications Commission DA 20-961 Before The
Federal Communications Commission DA 20-961 Before the Federal Communications Commission Washington, D.C. 20554 In the Matter of Online Political Files of ) File No.: POL -072120-9024290 ) Townsquare Media of Evansville/Owensboro, Inc. ) FRN: 9024290 ) Licensee of Commercial Radio Stations WBKR, ) WDKS, WGBF, WJLT, WKDQ, WGBF-FM and WOMI ORDER Adopted: August 26, 2020 Released: August 26, 2020 By the Chief, Media Bureau: 1. The Commission first adopted rules requiring broadcast stations to maintain public files documenting requests for political advertising time more than 80 years ago,1 and political file obligations have been embodied in section 315(e) of the Act since 2002.2 Section 315(e)(1) requires radio station licensees, among other regulatees, to maintain and make available for public inspection information about each request for the purchase of broadcast time that is made: (a) by or on behalf of a legally qualified candidate for public office,3 or (b) by an issue advertiser whose advertisement communicates a message relating to a political matter of national importance.4 Section 315(e)(3) of the Act requires stations to upload information about such requests to their online political files “as soon as possible.”5 Section 73.1943(a) of the Commission’s Rules requires stations to maintain and make available for public inspection information about all requests for broadcast time made by or on behalf of candidates for public office,6 and section 73.1943(c) requires stations to upload such information to their online political files “as soon as possible,” meaning “immediately absent unusual circumstances.”7 2. -
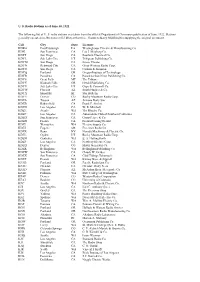
U. S. Radio Stations As of June 30, 1922 the Following List of U. S. Radio
U. S. Radio Stations as of June 30, 1922 The following list of U. S. radio stations was taken from the official Department of Commerce publication of June, 1922. Stations generally operated on 360 meters (833 kHz) at this time. Thanks to Barry Mishkind for supplying the original document. Call City State Licensee KDKA East Pittsburgh PA Westinghouse Electric & Manufacturing Co. KDN San Francisco CA Leo J. Meyberg Co. KDPT San Diego CA Southern Electrical Co. KDYL Salt Lake City UT Telegram Publishing Co. KDYM San Diego CA Savoy Theater KDYN Redwood City CA Great Western Radio Corp. KDYO San Diego CA Carlson & Simpson KDYQ Portland OR Oregon Institute of Technology KDYR Pasadena CA Pasadena Star-News Publishing Co. KDYS Great Falls MT The Tribune KDYU Klamath Falls OR Herald Publishing Co. KDYV Salt Lake City UT Cope & Cornwell Co. KDYW Phoenix AZ Smith Hughes & Co. KDYX Honolulu HI Star Bulletin KDYY Denver CO Rocky Mountain Radio Corp. KDZA Tucson AZ Arizona Daily Star KDZB Bakersfield CA Frank E. Siefert KDZD Los Angeles CA W. R. Mitchell KDZE Seattle WA The Rhodes Co. KDZF Los Angeles CA Automobile Club of Southern California KDZG San Francisco CA Cyrus Peirce & Co. KDZH Fresno CA Fresno Evening Herald KDZI Wenatchee WA Electric Supply Co. KDZJ Eugene OR Excelsior Radio Co. KDZK Reno NV Nevada Machinery & Electric Co. KDZL Ogden UT Rocky Mountain Radio Corp. KDZM Centralia WA E. A. Hollingworth KDZP Los Angeles CA Newbery Electric Corp. KDZQ Denver CO Motor Generator Co. KDZR Bellingham WA Bellingham Publishing Co. KDZW San Francisco CA Claude W. -

Draft Copy « Licensing and Management System «
Approved by OMB (Office of Management and Budget) 3060-0031 March 2019 (REFERENCE COPY - Not for submission) Notification of Consummation File Number: 0000139052 Submit Date: 03/12/2021 Lead Call Sign: WGBF FRN: 0009024290 Service: Full Power AM Purpose: Notification of Consummation Status: Accepted Status Date: 03/15/2021 Filing Status: Active General Section Question Response Information Attachments Are attachments (other than associated schedules) being No filed with this application? Applicant Applicant Name, Type, and Contact Information Information Applicant Address Phone Email Applicant Type TOWNSQUARE MEDIA OF 1 +1 (203) fcccontact@townsquaremedia. Corporation EVANSVILLE/OWENSBORO, MANHATTANVILLE 861-0900 com INC. ROAD SUITE 202 PURCHASE, NY 10577 United States Contact Contact Name Address Phone Email Contact Type Representatives Information (1) Howard M. Liberman 1800 M St NW 800N +1 (202) 383- hliberman@wbklaw. Legal Wilkinson Barker Knauer, Washington, DC 3373 com Representative LLP 20036 United States Consummation Details Notification Details Date of Consummation FRN of Licensee Post-consummation 2021-03-09 0009024290 Consummate the Following Authorizations: Select all the authorizations in the table below that will not be consummated Call Sign Facility ID File Number Will Not Consummate WGBF 660 0000135396 WOMI 67777 0000135397 WDKS 48710 0000135398 W256CF 140464 0000135399 WGBF-FM 659 0000135400 W279DV 202371 0000135401 WKDQ 6871 0000135402 WJLT 36946 0000135403 WBKR 67778 0000135404 Certification Section Question Response Authorized Party to Sign WILLFUL FALSE STATEMENTS MADE ON THIS FORM OR ANY ATTACHMENTS ARE PUNISHABLE BY FINE AND/OR IMPRISONMENT (U.S. Code, Title 18, §1001) AND/OR REVOCATION OF ANY STATION AUTHORIZATION (U.S. Code, Title 47, §312(a)(1)), AND /OR FORFEITURE (U.S. -

DOCUMENT RESUME TITLE Training Program, Region II Office Of
DOCUMENT RESUME ED 060 975 32 RC 006 004 TITLE Training Program, Region II Office of Migrant Education: A Component [of] the California Plan for the Education of Migrant Children. INSTITUTION Butte County Superintendent of Schools,Oroville, Calif.; California State Dept. of Education, Sacramento. Bureau of CommunityServices ana Migrant Education. SPONS AGE 7CY Office of Education (DHEW), Washington, D.C.Office of Programs for the Disadvantaged. PUB DATE 71 NOTE 1414p. EDRS PRICE MF-$0.65 HC-$16.45 DESCRIPTORS Activity Units; *Curriculum Design; Enrollment; *Instructional Materials; wLanguage Instruction; *Migrant Child Education; Program Design; Resource Materials; Staff Role; Summer Programs; Teacher Aides; Teacher Education; *Teaching Guides;Units of Study (Subject Fields) ABSTRACT In a discussion of the summertraining program for teachers of migrant children in the 120 schoolsserved by Region II of California's Office of Migrant Education,the following elements are included: an evaluation ofthe 1970 summer school program, a description of the program's organization in termsof staff members' responsibilities, and examples for organization ofinstruction. Sample daily lessons are presented in the areasof language skills (e.g., visual discrimination of lettersand English words, auditory perception, and phonetics), reading, and mathematics;materials for use with each lesson are alsoincluded, as are sample tests and mini-courses in writing behavioral objectives. Aguide for extended-day activities developed for personsworking with migrant children from primary and intermediate gradesis also included. This guide contains activities for languagedevelopment, recreation, and arts and crafts which are"educationally valuable as well as culturally acceptable to migrant youngsters:"the guide also contains an index and a resourcebibliography. -

530 CIAO BRAMPTON on ETHNIC AM 530 N43 35 20 W079 52 54 09-Feb
frequency callsign city format identification slogan latitude longitude last change in listing kHz d m s d m s (yy-mmm) 530 CIAO BRAMPTON ON ETHNIC AM 530 N43 35 20 W079 52 54 09-Feb 540 CBKO COAL HARBOUR BC VARIETY CBC RADIO ONE N50 36 4 W127 34 23 09-May 540 CBXQ # UCLUELET BC VARIETY CBC RADIO ONE N48 56 44 W125 33 7 16-Oct 540 CBYW WELLS BC VARIETY CBC RADIO ONE N53 6 25 W121 32 46 09-May 540 CBT GRAND FALLS NL VARIETY CBC RADIO ONE N48 57 3 W055 37 34 00-Jul 540 CBMM # SENNETERRE QC VARIETY CBC RADIO ONE N48 22 42 W077 13 28 18-Feb 540 CBK REGINA SK VARIETY CBC RADIO ONE N51 40 48 W105 26 49 00-Jul 540 WASG DAPHNE AL BLK GSPL/RELIGION N30 44 44 W088 5 40 17-Sep 540 KRXA CARMEL VALLEY CA SPANISH RELIGION EL SEMBRADOR RADIO N36 39 36 W121 32 29 14-Aug 540 KVIP REDDING CA RELIGION SRN VERY INSPIRING N40 37 25 W122 16 49 09-Dec 540 WFLF PINE HILLS FL TALK FOX NEWSRADIO 93.1 N28 22 52 W081 47 31 18-Oct 540 WDAK COLUMBUS GA NEWS/TALK FOX NEWSRADIO 540 N32 25 58 W084 57 2 13-Dec 540 KWMT FORT DODGE IA C&W FOX TRUE COUNTRY N42 29 45 W094 12 27 13-Dec 540 KMLB MONROE LA NEWS/TALK/SPORTS ABC NEWSTALK 105.7&540 N32 32 36 W092 10 45 19-Jan 540 WGOP POCOMOKE CITY MD EZL/OLDIES N38 3 11 W075 34 11 18-Oct 540 WXYG SAUK RAPIDS MN CLASSIC ROCK THE GOAT N45 36 18 W094 8 21 17-May 540 KNMX LAS VEGAS NM SPANISH VARIETY NBC K NEW MEXICO N35 34 25 W105 10 17 13-Nov 540 WBWD ISLIP NY SOUTH ASIAN BOLLY 540 N40 45 4 W073 12 52 18-Dec 540 WRGC SYLVA NC VARIETY NBC THE RIVER N35 23 35 W083 11 38 18-Jun 540 WETC # WENDELL-ZEBULON NC RELIGION EWTN DEVINE MERCY R. -

EEO PUBLIC FILE REPORT Townsquare Media Evansville/Owensboro, Inc
EEO PUBLIC FILE REPORT Townsquare Media Evansville/Owensboro, Inc. WKDQ (FM), WDKS (FM), WGBF (FM), WJLT (FM), WGBF (AM), WOMI (FM), WBKR (FM) April 1, 2017 to March 31, 2018 Section 1. Vacancy List Job Title Recruitment Sources (RS) RS that Referred Used to Fill Vacancy the hire Media and Digital Sales Executive 1,2,3,4,5,6,7,8,9,12 12 Media and Digital Sales Executive 1,2,3,4,5,6,7,8,9 2 Regional Digital Sales Executive 1,2,3,4,5,6,7,8,9 8 Regional Digital Sales Executive 1,2,3,4,5,6,7,8,9 8 On-Air Host 1,2,3,4,5,6,7,8,9 1 On-Air Host 1,2,3,4,5,6,7,8,9,11 11 Brand Manager 1,2,3,4,5,6,7,8,9,11 11 Brand Manager 1,2,3,4,5,6,7,8,9,11 11 Receptionist 1,2,3,4,5,6,7,8,9,12 12 Section 2. Recruitment Source List RS RS Information RS Entitled No. of Interviews Number to Vacancy Referred by RS over Notification 12-month period ? (Yes/No) 1 Broadcast Compliance Services – N 3 Service posts jobs to over 100 resource locations in the Tri-State area. - Robin Cooper 1700 Rockville Pike, Suite 400 Rockville, Maryland 20852 – (301) 998-6136 2 Facebook N 2 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 3 Greenhouse Exports to: Career’s Page N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 4 Greenhouse Exports to: CareerBuilder N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 5 Greenhouse Exports to: Indeed N 1 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 6 Greenhouse Exports to: Simply Hired N 0 Recruiting Coordinator, TSM Office: 203-861-0900 -

Eoeral Register
7 \> « t o UTTER* SCRIPTA EOERAL REGISTER VOLUMI 12 1934 NUMBER 122 4 Wanted ^ ' Washington, Saturday, June 2?, Ï947 TITLE 6— AGRICULTURAL CREDIT Forms may be obtained from county committees in areas where loans are CONTENTS Chapter II— Production and Marketing available, or from the office of Commod Agriculture Department Administration (Commodity Credit) ity Credit Corporation serving the area. State and county committees will deter See also Animal Industry Bureau» {1947 C. C. C. Seed Bulletin 1 (Loan)] Commodity Credit Corporation; mine or cause to be determined, "the Sugar Rationing Administration. P art 274—S eed P u r ch a se and L oan quantity and grade of the commodity P rogram and the amount of the loan. All docu Rules and regulations: ments will be completed and approved Citrus fruits; limitation of ship- 1947 SEED LOAN PROGRAM by the county committee, which will re ments: This bulletin states the requirements , tain copies of all documents: Provided, California and Arizona: with respect to the 1947 Seed Loan Pro however, That the county committee may . Lemons--------------------2__ 4016 gram formulated by Commodity Credit designate in writing certain employees Oranges________________ 4017 Corporation and the Production and of the county agricultural conservation Florida; oranges__________ 4015 Marketing Administration. Loans will association to execute such forms on be Peaches, fresh, in Georgia; reg be made available on winter cover crop half of the committee. ulation by size____.______4017 seed (hereinafter referred to as the The county committee will furnish the Tobacco inspection; designation “commodity”) produced in 1947 in ac borrower with the names of local lending of Fayetteville, N. -

EEO PUBLIC FILE REPORT Townsquare Media Evansville/Owensboro, Inc
EEO PUBLIC FILE REPORT Townsquare Media Evansville/Owensboro, Inc. WKDQ (FM), WDKS (FM), WGBF (FM), WJLT (FM), WGBF (AM), WOMI (FM), WBKR (FM) April 1, 2018 to March 31, 2019 Section 1. Vacancy List Job Title Recruitment Sources (RS) RS that Referred Used to Fill Vacancy the hire Account Executive 3,4,5,6,7,8,9,11 11 Digital Campaign Manager, Ignite 3,4,5,6,7,8,9,11 11 Account Executive, Ignite 3,4,5,6,7,8,9,11,12 5 Section 2. Recruitment Source List RS RS Information RS Entitled No. of Interviews Number to Vacancy Referred by RS over Notification 12-month period ? (Yes/No) 1 Broadcast Compliance Services – N 0 Service posts jobs to over 100 resource locations in the Tri-State area. - Robin Cooper 1700 Rockville Pike, Suite 400 Rockville, Maryland 20852 – (301) 998-6136 2 Facebook N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 3 Greenhouse Exports to: Career’s Page N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 4 Greenhouse Exports to: CareerBuilder N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 5 Greenhouse Exports to: Indeed N 6 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 6 Greenhouse Exports to: Simply Hired N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 7 Greenhouse Exports to: Glassdoor N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 8 Greenhouse Exports to: LinkedIn N 0 Recruiting Coordinator, TSM Office: 203-861-0900 www.townsquaremedia.com 9 Greenhouse N Recruiting Coordinator, TSM 7 Office: 203-861-0900 www.townsquaremedia.com 10 All Access & Radio Trades N 0 11 Referred by Client or Internal N 2 20 NW 3RD Street, Suite 600, Evansville, IN 47708 - (812) 425-4226 12 Townsquare Media On-Air – Promo’s N 0 Carrie Williams 20 NW 3RD Street, Suite 600, Evansville, IN 47708 – (812) 425-4226 Total Number of Interviews over 12-month period: 15 Section 3. -

Licensing and Management System
Approved by OMB (Office of Management and Budget) 3060-0010 September 2019 (REFERENCE COPY - Not for submission) Commercial Broadcast Stations Non-Biennial Ownership Report (FCC Form 323) File Number: 0000150563 Submit Date: 2021-06-21 FRN: 0021048350 Purpose: Commercial Broadcast Stations Non-Biennial Ownership Report Status: Received Status Date: 06/21/2021 Filing Status: Active Section I - General Information 1. Respondent FRN Entity Name 0020136958 Townsquare Media, Inc. City (and Country if non State ("NA" if non-U. Zip Street Address U.S. address) S. address) Code Phone Email 1 Purchase NY 10577 +1 (203) fcccontact@townsquaremedia. Manhattanville 861-0900 com Road Suite 202 2. Contact Name Organization Representative Howard M. Liberman Wilkinson Barker Knauer, LLP Street City (and Country if non U.S. Zip Address address) State Code Phone Email 1800 M St Washginton DC 20036 +1 (202) 383- hliberman@wbklaw. NW 800N 3373 com Not Applicable 3. Application Filing Fee 4. Nature of (a) Provide the following information about the Respondent: Respondent Relationship to stations/permits Entity required to file a Form 323 because it holds an attributable interest in one or more Licensees Nature of Respondent For-profit corporation (b) Provide the following information about this report: Purpose Transfer of control or assignment of license/permit "As of" date 06/03/2021 When filing a biennial ownership report or validating and resubmitting a prior biennial ownership report, this date must be Oct. 1 of the year in which this report is filed. 5. Licensee(s) Respondent is filing this report to cover the following Licensee(s)/Permittee(s) and station(s)/permit(s): /Permittees(s) and Station(s) Licensee/Permittee Name FRN /Permit(s) Townsquare Media Licensee of Utica/Rome, Inc. -

Federal Communications Commission DA 20-961 Before The
Federal Communications Commission DA 20-961 Before the Federal Communications Commission Washington, D.C. 20554 In the Matter of Online Political Files of ) File No.: POL -072120-9024290 ) Townsquare Media of Evansville/Owensboro, Inc. ) FRN: 9024290 ) Licensee of Commercial Radio Stations WBKR, ) WDKS, WGBF, WJLT, WKDQ, WGBF-FM and WOMI ORDER Adopted: August 26, 2020 Released: August 26, 2020 By the Chief, Media Bureau: 1. The Commission first adopted rules requiring broadcast stations to maintain public files documenting requests for political advertising time more than 80 years ago,1 and political file obligations have been embodied in section 315(e) of the Act since 2002.2 Section 315(e)(1) requires radio station licensees, among other regulatees, to maintain and make available for public inspection information about each request for the purchase of broadcast time that is made: (a) by or on behalf of a legally qualified candidate for public office,3 or (b) by an issue advertiser whose advertisement communicates a message relating to a political matter of national importance.4 Section 315(e)(3) of the Act requires stations to upload information about such requests to their online political files “as soon as possible.”5 Section 73.1943(a) of the Commission’s Rules requires stations to maintain and make available for public inspection information about all requests for broadcast time made by or on behalf of candidates for public office,6 and section 73.1943(c) requires stations to upload such information to their online political files “as soon as possible,” meaning “immediately absent unusual circumstances.”7 2. -

United States Securities and Exchange Commission Form
UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 FORM 10-K ☒ ANNUAL REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the fiscal year ended December 31, 2020 OR ☐ TRANSITION REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the transition period from _______ to ______ Commission file number 001-36558 Townsquare Media, Inc. (Exact name of registrant as specified in its charter) Delaware 27-1996555 (State or other jurisdiction of incorporation or organization) (I.R.S. Employer Identification No.) One Manhattanville Road Suite 202 Purchase, New York 10577 (Address of Principal Executive Offices) (Zip Code) (203) 861-0900 Registrant's telephone number, including area code Not applicable (Former name, former address and former fiscal year, if changed since last report) Securities registered pursuant to Section 12(b) of the Act: Title of each class Trading Symbol(s) Name of each exchange on which registered Class A Common Stock, $0.01 par value per share TSQ The New York Stock Exchange Securities registered pursuant to Section 12(g) of the Act: None Indicate by check mark if the registrant is a well-known seasoned issuer, as defined in Rule 405 of the Securities Act. Yes ☐ No ☒ Indicate by check mark if the registrant is not required to file reports pursuant to Section 13 or Section 15(d) of the Act. Yes ☐ No ☒ Indicate by check mark whether the registrant: (1) has filed all reports required to be filed by Section 13 or 15(d) of the Securities Exchange Act of 1934 during the preceding 12 months (or for such shorter period that the registrant was required to file such reports), and (2) has been subject to such filing requirements for the past 90 days.