The Clementine Mission —
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

N98-L7433 World Space Foundation P.O
175 A LUNAR POLAR EXPEDITION Richard Dowling, Robert L. Staehle, and Tomas Svitek N98-l7433 World Space Foundation P.O. Box Y South Pasadena CA 91031 Advanced exploration and development in harsh environments require mastery of basic human suroival skills. F.xpeditions into the lethal climates of Earth's polar regions offer useful lessons for tommrow's lunar pioneers. In Arctic and Antarctic exploration, "wintering over" was a cruciaJ milestone. 7be ability to establish a supply base and suroive months of polar cold and da1*ness made extensive travel and exploration possible. Because of the possibility of near-constant solar illumination, the lunar polar regions, unlike Earth's, may offer the most hospitable site for habitation. 7be World space Foundation ts examining a scenario for establishing a .five.person expeditionary team on the lunar north pole for one year. 1bi.s paper ts a status report on a point design addressing site selection, transportation, power, and life support requirements. POLAR EXPWRATION AND North Pole on 6 April, 1909, and Roald Amundson's magnificently LUNAR OBJECl1VFS planned expedition reaching the South Pole on 14 December, 1911. Today there are permanent residents in both the Arctic and In March 1899, almost one hundred years ago, the explorer Antarctic pursuing commercial and scientific activities. Indeed, the Carsten E. Borchgrevnik established the first winter camp on the International Antarctic Treaty may prove a useful example for "white continent," Antarctica. Unlike the north polar regions, those trying to determine who "owns" the Moon. Antarctica had never been inhabited by man. Though marine birds Unlike Earth's polar regions, the lunar poles may be the most and animals visit the coastal regions, only primitive mo.....s and hospitable locations for early long-term human habitats, so we do lichen can survive the polar deserts of ice and snow. -

Volcanic History of the Imbrium Basin: a Close-Up View from the Lunar Rover Yutu
Volcanic history of the Imbrium basin: A close-up view from the lunar rover Yutu Jinhai Zhanga, Wei Yanga, Sen Hua, Yangting Lina,1, Guangyou Fangb, Chunlai Lic, Wenxi Pengd, Sanyuan Zhue, Zhiping Hef, Bin Zhoub, Hongyu Ling, Jianfeng Yangh, Enhai Liui, Yuchen Xua, Jianyu Wangf, Zhenxing Yaoa, Yongliao Zouc, Jun Yanc, and Ziyuan Ouyangj aKey Laboratory of Earth and Planetary Physics, Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing 100029, China; bInstitute of Electronics, Chinese Academy of Sciences, Beijing 100190, China; cNational Astronomical Observatories, Chinese Academy of Sciences, Beijing 100012, China; dInstitute of High Energy Physics, Chinese Academy of Sciences, Beijing 100049, China; eKey Laboratory of Mineralogy and Metallogeny, Guangzhou Institute of Geochemistry, Chinese Academy of Sciences, Guangzhou 510640, China; fKey Laboratory of Space Active Opto-Electronics Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China; gThe Fifth Laboratory, Beijing Institute of Space Mechanics & Electricity, Beijing 100076, China; hXi’an Institute of Optics and Precision Mechanics, Chinese Academy of Sciences, Xi’an 710119, China; iInstitute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China; and jInstitute of Geochemistry, Chinese Academy of Science, Guiyang 550002, China Edited by Mark H. Thiemens, University of California, San Diego, La Jolla, CA, and approved March 24, 2015 (received for review February 13, 2015) We report the surface exploration by the lunar rover Yutu that flows in Mare Imbrium was obtained only by remote sensing from landed on the young lava flow in the northeastern part of the orbit. On December 14, 2013, Chang’e-3 successfully landed on the Mare Imbrium, which is the largest basin on the nearside of the young and high-Ti lava flow in the northeastern Mare Imbrium, Moon and is filled with several basalt units estimated to date from about 10 km south from the old low-Ti basalt unit (Fig. -

A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B
A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B. L. Redding U. S. Geological Survey, 2255 N. Gemini Drive, Flagstaff, AZ 86001, USA, [email protected] Introduction: We have completed a new general unified lunar control network and lunar topographic model based on Clementine images. This photogrammetric network solution is the largest planetary control network ever completed. It includes the determination of the 3-D positions of 272,931 points on the lunar surface and the correction of the camera angles for 43,866 Clementine images, using 546,126 tie point measurements. The solution RMS is 20 µm (= 0.9 pixels) in the image plane, with the largest residual of 6.4 pixels. We are now documenting our solution [1] and plan to release the solution results soon [2]. Previous Networks: In recent years there have been two generally accepted lunar control networks. These are the Unified Lunar Control Network (ULCN) and the Clementine Lunar Control Network (CLCN), both derived by M. Davies and T. Colvin at RAND. The original ULCN was described in the last major publication about a lunar control network [3]. Images for this network are from the Apollo, Mariner 10, and Galileo missions, and Earth-based photographs. The CLCN was derived from Clementine images and measurements on Clementine 750-nm images. The purpose of this network was to determine the geometry for the Clementine Base Map [4]. The geometry of that mosaic was used to produce the Clementine UVVIS digital image model [5] and the Near-Infrared Global Multispectral Map of the Moon from Clementine [6]. -

Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements
Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements by Brent Archinal USGS Astrogeology Team 2255 N. Gemini Drive Flagstaff, AZ 86001 [email protected] As of 2004 December 9 Version 1.0 Table of Contents 1. Introduction 1.1. General 1.2. Conventions 2. Observations Equations and Their Partials 2.1. Line Scanner Camera Specific Modeling 2.2. Partials for New Parameters 2.2.1. Orientation Partials 2.2.2. Spatial Partials 2.2.3. Partials of the observations with respect to the parameters 2.2.4. Parameter Weighting 3. Adjustment Model 4. Implementation 4.1. Input/Output Changes 4.1.1. Image Measurements 4.1.2. SPICE Data 4.1.3. Program Control (Parameters) Information 4.2. Computational Changes 4.2.1. Generation of A priori Information 4.2.2. Partial derivatives 4.2.3. Solution Output 5. Testing and Near Term Work 6. Future Work Acknowledgements References Useful web sites Appendix I - Partial Transcription of Colvin (1992) Documentation Appendix II - HiRISE Sensor Model Information 1. Introduction 1.1 General The overall problem we’re solving is that we want to be able to set up the relationships between the coordinates of arbitrary physical points in space (e.g. ground points) and their coordinates on line scanner (or “pushbroom”) camera images. We then want to do a least squares solution in order to come up with consistent camera orientation and position information that represents these relationships accurately. For now, supported by funding from the NASA Critical Data Products initiative (for 2003 September to 2005 August), we will concentrate on handling the THEMIS IR camera system (Christensen et al., 2003). -

Project Selene: AIAA Lunar Base Camp
Project Selene: AIAA Lunar Base Camp AIAA Space Mission System 2019-2020 Virginia Tech Aerospace Engineering Faculty Advisor : Dr. Kevin Shinpaugh Team Members : Olivia Arthur, Bobby Aselford, Michel Becker, Patrick Crandall, Heidi Engebreth, Maedini Jayaprakash, Logan Lark, Nico Ortiz, Matthew Pieczynski, Brendan Ventura Member AIAA Number Member AIAA Number And Signature And Signature Faculty Advisor 25807 Dr. Kevin Shinpaugh Brendan Ventura 1109196 Matthew Pieczynski 936900 Team Lead/Operations Logan Lark 902106 Heidi Engebreth 1109232 Structures & Environment Patrick Crandall 1109193 Olivia Arthur 999589 Power & Thermal Maedini Jayaprakash 1085663 Robert Aselford 1109195 CCDH/Operations Michel Becker 1109194 Nico Ortiz 1109533 Attitude, Trajectory, Orbits and Launch Vehicles Contents 1 Symbols and Acronyms 8 2 Executive Summary 9 3 Preface and Introduction 13 3.1 Project Management . 13 3.2 Problem Definition . 14 3.2.1 Background and Motivation . 14 3.2.2 RFP and Description . 14 3.2.3 Project Scope . 15 3.2.4 Disciplines . 15 3.2.5 Societal Sectors . 15 3.2.6 Assumptions . 16 3.2.7 Relevant Capital and Resources . 16 4 Value System Design 17 4.1 Introduction . 17 4.2 Analytical Hierarchical Process . 17 4.2.1 Longevity . 18 4.2.2 Expandability . 19 4.2.3 Scientific Return . 19 4.2.4 Risk . 20 4.2.5 Cost . 21 5 Initial Concept of Operations 21 5.1 Orbital Analysis . 22 5.2 Launch Vehicles . 22 6 Habitat Location 25 6.1 Introduction . 25 6.2 Region Selection . 25 6.3 Locations of Interest . 26 6.4 Eliminated Locations . 26 6.5 Remaining Locations . 27 6.6 Chosen Location . -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -

March 21–25, 2016
FORTY-SEVENTH LUNAR AND PLANETARY SCIENCE CONFERENCE PROGRAM OF TECHNICAL SESSIONS MARCH 21–25, 2016 The Woodlands Waterway Marriott Hotel and Convention Center The Woodlands, Texas INSTITUTIONAL SUPPORT Universities Space Research Association Lunar and Planetary Institute National Aeronautics and Space Administration CONFERENCE CO-CHAIRS Stephen Mackwell, Lunar and Planetary Institute Eileen Stansbery, NASA Johnson Space Center PROGRAM COMMITTEE CHAIRS David Draper, NASA Johnson Space Center Walter Kiefer, Lunar and Planetary Institute PROGRAM COMMITTEE P. Doug Archer, NASA Johnson Space Center Nicolas LeCorvec, Lunar and Planetary Institute Katherine Bermingham, University of Maryland Yo Matsubara, Smithsonian Institute Janice Bishop, SETI and NASA Ames Research Center Francis McCubbin, NASA Johnson Space Center Jeremy Boyce, University of California, Los Angeles Andrew Needham, Carnegie Institution of Washington Lisa Danielson, NASA Johnson Space Center Lan-Anh Nguyen, NASA Johnson Space Center Deepak Dhingra, University of Idaho Paul Niles, NASA Johnson Space Center Stephen Elardo, Carnegie Institution of Washington Dorothy Oehler, NASA Johnson Space Center Marc Fries, NASA Johnson Space Center D. Alex Patthoff, Jet Propulsion Laboratory Cyrena Goodrich, Lunar and Planetary Institute Elizabeth Rampe, Aerodyne Industries, Jacobs JETS at John Gruener, NASA Johnson Space Center NASA Johnson Space Center Justin Hagerty, U.S. Geological Survey Carol Raymond, Jet Propulsion Laboratory Lindsay Hays, Jet Propulsion Laboratory Paul Schenk, -

LUNAR REGOLITH PROPERTIES CONSTRAINED by LRO DIVINER and CHANG'e 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 3176.pdf LUNAR REGOLITH PROPERTIES CONSTRAINED BY LRO DIVINER AND CHANG’E 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O. Hayne2, D. T. Blewett3, 1Planetary Sci- ence Institute (1700 East Fort Lowell, Suite 106 Tucson, AZ 85719-2395, [email protected]), 2University of Colorado, Boulder. 3Johns Hopkins Univ. Applied Physics Lab, Maryland. Introduction: The geophysical properties of the sults of the thermal model (which includes layer num- lunar regolith have been well-studied, but many uncer- bers, layer thickness, temperature profile and density tainties remain about their in-situ nature. Diviner Lunar profile) are input parameters for the microwave model. Radiometer Experiment onboard LRO [1] is an instru- In contrast to [2, 3], we update the thermal parame- ment measuring the surface bolometric temperature of ters to match the surface temperature at noon in the the regolith. It has been systematically mapping the equatorial region and diurnal temperature variation in Moon since July 5, 2009 at solar and infrared wave- high latitude (Fig. 1). The best fit of the data show that lengths covering a full range of latitudes, longitudes, for most highlands the regolith has a bond albedo of local times and seasons. The Microwave Radiometer 0.09 at normal solar incidence and bond albedo at arbi- (MRM) carried by Chang’e 2 (CE-2) was used to de- trary solar incidence θ is represented by A=0.09 rive the brightness temperature of the moon in frequen- +0.04×(4θ/π)3+0.05×(2θ/π)8. -

ESA Bulletin February 2003
SMART-1/2 3/3/03 3:56 PM Page 14 Science A Solar-Powered Visit to the Moon “As the first spacecraft to use primary electric propulsion in conjunction with gravity manoeuvres,and as Europe’s first mission to the Moon, SMART-1 opens up new horizons in space engineering and scientific discovery.Moreover,we promise frequent news and pictures,so that everyone can share in our lunar adventure.” Giuseppe Racca, ESA’s Smart-1 Project Manager. 14 SMART-1/2 3/3/03 3:56 PM Page 15 SMART-1 The SMART-1 Mission Giuseppe Racca, Bernard Foing, and the SMART-1 Project Team ESA Directorate of Scientific Programmes, ESTEC, Noordwijk, The Netherlands y July 2003 a hitchhiking team of engineers and scientists will be at Europe’s spaceport at Kourou in French Guiana, thumbing Ba lift for a neat little spacecraft, ESA’s SMART-1, on the next Ariane-5 launcher that has room to spare. It’s not very big - just a box a metre wide with folded solar panels attached - and six strong men could lift it. It weighs less than 370 kilograms, compared with thousands of kilos for Ariane’s usual customers’satellites. So it should pose no problems as an auxiliary passenger. SMART stands for Small Missions for Advanced Research in Technology. They pave the way for the novel and ambitious science projects of the future, by testing the new technologies that will be needed. But a SMART project is also required to be cheap - about one- fifth of the cost of a major science mission for ESA - which is why SMART-1 has no launcher of its own. -

Image: the Lunar North Pole 6 October 2015
Image: The lunar North Pole 6 October 2015 no easy task. The biggest challenge in creating this mosaic was the changing lighting conditions. Despite the "dark side of the moon" misnomer, both sides of the moon do experience night and day in the same way. The far, or 'dark', side has 'days' of two weeks just like the nearside and is 'dark' only in the sense that it was unknown to humans before the arrival of space probes. At the moon's north pole, pictured here, as is the case across all areas of the moon, the Sun illuminates from different directions. As the Sun moves across the moon's sky, new areas are illuminated and shadows spread and move. This means that many of the images used for the mosaic are lit from different directions. This is why, on close inspection, faint squares can be found in the mosaic where two images of different illumination butt up against one another. Credit: ESA/SPACE-X (Space Exploration Institute). Acknowledgments: J. Manuel Fonseca, M. Costa & A. Mora (UNINOVA); B. Grieger & M. Almeida (ESA) The overall effect however, was worth the labour, and the resulting image gives us a fresh perspective on our natural satellite. Astronomers can use images like these to identify peaks on the The pockmarked landscape captured in this image north pole that are almost always lit and areas deep from ESA's SMART-1 mission is the surface of our inside its largest craters that may never see moon. Some of the many craters scattered across daylight. These areas of constant shadow are of the lunar surface are clearly visible, records of the particular interest because frozen within them could many impacts that have plagued it. -

The Peaks of Eternal Light
The Peaks of Eternal Light: a Near-term Property Issue on the Moon Martin Elvis a,1, Tony Milligan b, Alanna Krolikowskic a Harvard-Smithsonian Center for Astrophysics, 60 Garden St., Cambridge MA 02138, USA; [email protected]; b Department of Theology and Religious Studies, King’s College London, Virginia Wolf Building, 22 Kingsway, London WC2B 6NR. c Georg-August Universität Göttingen, Heinrich-Düker-Weg 14, 37073, Göttingen, Germany; [email protected] ABSTRACT The Outer Space Treaty makes it clear that the Moon is the ‘province of all mankind’, with the latter ordinarily understood to exclude state or private appropriation of any portion of its surface. However, there are indeterminacies in the Treaty and in space law generally over the issue of appropriation. These indeterminacies might permit a close approximation to a property claim or some manner of ‘quasi-property’. The recently revealed highly inhomogeneous distribution of lunar resources changes the context of these issues. We illustrate this altered situation by considering the Peaks of Eternal Light. They occupy about one square kilometer of the lunar surface. We consider a thought experiment in which a Solar telescope is placed on one of the Peaks of Eternal Light at the lunar South pole for scientific research. Its operation would require non- disturbance, and hence that the Peak remain unvisited by others, effectively establishing a claim of protective exclusion and de facto appropriation. Such a telescope would be relatively easy to emplace with today’s technology and so poses a near-term property issue on the Moon. While effective appropriation of a Peak might proceed without raising some of the familiar problems associated with commercial development (especially lunar mining), the possibility of such appropriation nonetheless raises some significant issues concerning justice and the safeguarding of scientific practice on the lunar surface. -
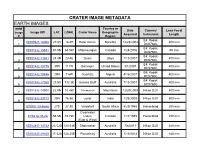
CRATER IMAGE METADATA EARTH IMAGES Country Or BMM Date Camera/ Lens Focal Image Image ID# LAT
CRATER IMAGE METADATA EARTH IMAGES Country or BMM Date Camera/ Lens Focal Image Image ID# LAT. LONG. Crater Name Geographic Acquired Instrument Length # Region E4: Kodak ISS006-E-16068 27.8S 16.4E Roter Kamm Namibia 12/28/2002 400 mm 1 DCS760C E4: Kodak ISS012-E-15881 51.5N 68.5W Manicouagan Canada 1/24/2006 50 mm 2 DCS760C E4: Kodak ISS014-E-11841 24.4N 24.4E Oasis Libya 1/13/2007 400 mm 3 DCS760C E4: Kodak ISS014-E-15775 35N 111W Barringer United States 3/1/2007 400 mm 4 DCS760C E4: Kodak ISS014-E-19496 29N 7.6W Ouarkziz Algeria 4/16/2007 800 mm 5 DCS760C E4: Kodak ISS015-E-17360 23.9S 132.3E Gosses Bluff Australia 7/13/2007 400 mm 6 DCS760C ISS018-E-14908 22.9N 10.4W Tenoumer Mauritania 12/20/2008 Nikon D2X 800 mm 7 ISS018-E-23713 20N 76.5E Lonar India 1/28/2009 Nikon D2X 800 mm 8 STS51I-33-56AA 27S 27.3E Vredefort South Africa 8/29/1985 Hasselblad 250 mm Clearwater STS61A-35-86 56.5N 74.7W Lakes Canada 11/1/1985 Hasselblad 250 mm (East & West) ISS028-E-14782 25.52S 120.53E Shoemaker Australia 7/6/2011 Nikon D2X 200 mm ISS034-E-29105 17.32S 128.25E Piccaninny Australia 1/15/2013 Nikon D2X 180 mm CRATER IMAGE METADATA MARS IMAGES BMM Geographic *Date or Camera/ Image Image ID# LAT. LONG. Crater Name Approx. YR Mission Name Region Instrument # Acquired PIA14290 5.4S 137.8E Gale Aeolis Mensae 2000's THEMIS IR Odyssey THEMIS IR Aeolis 14.5S 175.4E Gusev 2000's THEMIS IR Odyssey MOSAIC Quadrangle Mars Orbiter Colorized MOLA 42S 67E Hellas Basin Hellas Planitia 2000's Laser Altimeter Global Surveyor (MOLA) Viking Orbiter Margaritifer Visual