Frequency Analysis of Signals and Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Finding Pi Project
Name: ________________________ Finding Pi - Activity Objective: You may already know that pi (π) is a number that is approximately equal to 3.14. But do you know where the number comes from? Let's measure some round objects and find out. Materials: • 6 circular objects Some examples include a bicycle wheel, kiddie pool, trash can lid, DVD, steering wheel, or clock face. Be sure each object you choose is shaped like a perfect circle. • metric tape measure Be sure your tape measure has centimeters on it. • calculator It will save you some time because dividing with decimals can be tricky. • “Finding Pi - Table” worksheet It may be attached to this page, or on the back. What to do: Step 1: Choose one of your circular objects. Write the name of the object on the “Finding Pi” table. Step 2: With the centimeter side of your tape measure, accurately measure the distance around the outside of the circle (the circumference). Record your measurement on the table. Step 3: Next, measure the distance across the middle of the object (the diameter). Record your measurement on the table. Step 4: Use your calculator to divide the circumference by the diameter. Write the answer on the table. If you measured carefully, the answer should be about 3.14, or π. Repeat steps 1 through 4 for each object. Super Teacher Worksheets - www.superteacherworksheets.com Name: ________________________ “Finding Pi” Table Measure circular objects and complete the table below. If your measurements are accurate, you should be able to calculate the number pi (3.14). Is your answer name of circumference diameter circumference ÷ approximately circular object measurement (cm) measurement (cm) diameter equal to π? 1. -
Evaluating Fourier Transforms with MATLAB
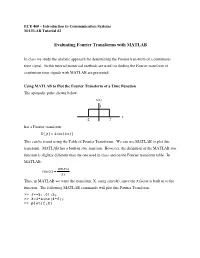
ECE 460 – Introduction to Communication Systems MATLAB Tutorial #2 Evaluating Fourier Transforms with MATLAB In class we study the analytic approach for determining the Fourier transform of a continuous time signal. In this tutorial numerical methods are used for finding the Fourier transform of continuous time signals with MATLAB are presented. Using MATLAB to Plot the Fourier Transform of a Time Function The aperiodic pulse shown below: x(t) 1 t -2 2 has a Fourier transform: X ( jf ) = 4sinc(4π f ) This can be found using the Table of Fourier Transforms. We can use MATLAB to plot this transform. MATLAB has a built-in sinc function. However, the definition of the MATLAB sinc function is slightly different than the one used in class and on the Fourier transform table. In MATLAB: sin(π x) sinc(x) = π x Thus, in MATLAB we write the transform, X, using sinc(4f), since the π factor is built in to the function. The following MATLAB commands will plot this Fourier Transform: >> f=-5:.01:5; >> X=4*sinc(4*f); >> plot(f,X) In this case, the Fourier transform is a purely real function. Thus, we can plot it as shown above. In general, Fourier transforms are complex functions and we need to plot the amplitude and phase spectrum separately. This can be done using the following commands: >> plot(f,abs(X)) >> plot(f,angle(X)) Note that the angle is either zero or π. This reflects the positive and negative values of the transform function. Performing the Fourier Integral Numerically For the pulse presented above, the Fourier transform can be found easily using the table. -

Almost Periodic Sequences and Functions with Given Values
ARCHIVUM MATHEMATICUM (BRNO) Tomus 47 (2011), 1–16 ALMOST PERIODIC SEQUENCES AND FUNCTIONS WITH GIVEN VALUES Michal Veselý Abstract. We present a method for constructing almost periodic sequences and functions with values in a metric space. Applying this method, we find almost periodic sequences and functions with prescribed values. Especially, for any totally bounded countable set X in a metric space, it is proved the existence of an almost periodic sequence {ψk}k∈Z such that {ψk; k ∈ Z} = X and ψk = ψk+lq(k), l ∈ Z for all k and some q(k) ∈ N which depends on k. 1. Introduction The aim of this paper is to construct almost periodic sequences and functions which attain values in a metric space. More precisely, our aim is to find almost periodic sequences and functions whose ranges contain or consist of arbitrarily given subsets of the metric space satisfying certain conditions. We are motivated by the paper [3] where a similar problem is investigated for real-valued sequences. In that paper, using an explicit construction, it is shown that, for any bounded countable set of real numbers, there exists an almost periodic sequence whose range is this set and which attains each value in this set periodically. We will extend this result to sequences attaining values in any metric space. Concerning almost periodic sequences with indices k ∈ N (or asymptotically almost periodic sequences), we refer to [4] where it is proved that, for any precompact sequence {xk}k∈N in a metric space X , there exists a permutation P of the set of positive integers such that the sequence {xP (k)}k∈N is almost periodic. -
MATLAB Examples Mathematics
MATLAB Examples Mathematics Hans-Petter Halvorsen, M.Sc. Mathematics with MATLAB • MATLAB is a powerful tool for mathematical calculations. • Type “help elfun” (elementary math functions) in the Command window for more information about basic mathematical functions. Mathematics Topics • Basic Math Functions and Expressions � = 3�% + ) �% + �% + �+,(.) • Statistics – mean, median, standard deviation, minimum, maximum and variance • Trigonometric Functions sin() , cos() , tan() • Complex Numbers � = � + �� • Polynomials = =>< � � = �<� + �%� + ⋯ + �=� + �=@< Basic Math Functions Create a function that calculates the following mathematical expression: � = 3�% + ) �% + �% + �+,(.) We will test with different values for � and � We create the function: function z=calcexpression(x,y) z=3*x^2 + sqrt(x^2+y^2)+exp(log(x)); Testing the function gives: >> x=2; >> y=2; >> calcexpression(x,y) ans = 16.8284 Statistics Functions • MATLAB has lots of built-in functions for Statistics • Create a vector with random numbers between 0 and 100. Find the following statistics: mean, median, standard deviation, minimum, maximum and the variance. >> x=rand(100,1)*100; >> mean(x) >> median(x) >> std(x) >> mean(x) >> min(x) >> max(x) >> var(x) Trigonometric functions sin(�) cos(�) tan(�) Trigonometric functions It is quite easy to convert from radians to degrees or from degrees to radians. We have that: 2� ������� = 360 ������� This gives: 180 � ������� = �[�������] M � � �[�������] = �[�������] M 180 → Create two functions that convert from radians to degrees (r2d(x)) and from degrees to radians (d2r(x)) respectively. Test the functions to make sure that they work as expected. The functions are as follows: function d = r2d(r) d=r*180/pi; function r = d2r(d) r=d*pi/180; Testing the functions: >> r2d(2*pi) ans = 360 >> d2r(180) ans = 3.1416 Trigonometric functions Given right triangle: • Create a function that finds the angle A (in degrees) based on input arguments (a,c), (b,c) and (a,b) respectively. -

Discrete Signals and Their Frequency Analysis
Discrete signals and their frequency analysis. Valentina Hubeika, Jan Cernock´yˇ DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz • recapitulation – fundamentals on discrete signals. • periodic and harmonic sequences • discrete signal processing • convolution • Fourier transform with discrete time • Discrete Fourier Transform 1 Sampled signal ⇒ discrete signal During sampling we consider only values of the signal at sampling period multiplies T : x(nT ), nT = ... − 2T, −T, 0,T, 2T, 3T,... For a discrete signal, we forget about real time and simply count the samples. Discrete time becomes : x[n], n = ... − 2, −1, 0, 1, 2, 3,... Thus we often call discrete signals just sequences. 2 Important discrete signals Unit step and unit impulse: 1 for n ≥ 0 1 for n =0 σ[n]= δ[n]= 0 elsewhere 0 elsewhere 3 Periodic discrete signals their behaviour repeats after N samples, the smallest possible N is denoted as N1 and is called fundamental period. Harmonic discrete signals (harmonic sequences) x[n]= C1 cos(ω1n + φ1) (1) • C1 is a positive constant – magnitude. • ω1 is a spositive constant – normalized angular frequency. As n is just a number, the unit of ω1 is [rad]. Note, that in the previous lecture we denoted with the same simbol an angular frequency of continuous signals. Although in the last lecture we used ′ symbol ω1 for discrete time, we will not do it any longer. You will recognize continuous time frequency if there is real time associated with it (for instance cos(ω1t)). If you see discrete time n (for instance cos(ω1n)) you should know we are talking about normalized angular frequency. -
36 Surprising Facts About Pi
36 Surprising Facts About Pi piday.org/pi-facts Pi is the most studied number in mathematics. And that is for a good reason. The number pi is an integral part of many incredible creations including the Pyramids of Giza. Yes, that’s right. Here are 36 facts you will love about pi. 1. The symbol for Pi has been in use for over 250 years. The symbol was introduced by William Jones, an Anglo-Welsh philologist in 1706 and made popular by the mathematician Leonhard Euler. 2. Since the exact value of pi can never be calculated, we can never find the accurate area or circumference of a circle. 3. March 14 or 3/14 is celebrated as pi day because of the first 3.14 are the first digits of pi. Many math nerds around the world love celebrating this infinitely long, never-ending number. 1/8 4. The record for reciting the most number of decimal places of Pi was achieved by Rajveer Meena at VIT University, Vellore, India on 21 March 2015. He was able to recite 70,000 decimal places. To maintain the sanctity of the record, Rajveer wore a blindfold throughout the duration of his recall, which took an astonishing 10 hours! Can’t believe it? Well, here is the evidence: https://twitter.com/GWR/status/973859428880535552 5. If you aren’t a math geek, you would be surprised to know that we can’t find the true value of pi. This is because it is an irrational number. But this makes it an interesting number as mathematicians can express π as sequences and algorithms. -

Double Factorial Binomial Coefficients Mitsuki Hanada Submitted in Partial Fulfillment of the Prerequisite for Honors in The
Double Factorial Binomial Coefficients Mitsuki Hanada Submitted in Partial Fulfillment of the Prerequisite for Honors in the Wellesley College Department of Mathematics under the advisement of Alexander Diesl May 2021 c 2021 Mitsuki Hanada ii Double Factorial Binomial Coefficients Abstract Binomial coefficients are a concept familiar to most mathematics students. In particular, n the binomial coefficient k is most often used when counting the number of ways of choosing k out of n distinct objects. These binomial coefficients are well studied in mathematics due to the many interesting properties they have. For example, they make up the entries of Pascal's Triangle, which has many recursive and combinatorial properties regarding different columns of the triangle. Binomial coefficients are defined using factorials, where n! for n 2 Z>0 is defined to be the product of all the positive integers up to n. One interesting variation of the factorial is the double factorial (n!!), which is defined to be the product of every other positive integer up to n. We can use double factorials in the place of factorials to define double factorial binomial coefficients (DFBCs). Though factorials and double factorials look very similar, when we use double factorials to define binomial coefficients, we lose many important properties that traditional binomial coefficients have. For example, though binomial coefficients are always defined to be integers, we can easily determine that this is not the case for DFBCs. In this thesis, we will discuss the different forms that these coefficients can take. We will also focus on different properties that binomial coefficients have, such as the Chu-Vandermonde Identity and the recursive relation illustrated by Pascal's Triangle, and determine whether there exists analogous results for DFBCs. -

Numerous Proofs of Ζ(2) = 6
π2 Numerous Proofs of ζ(2) = 6 Brendan W. Sullivan April 15, 2013 Abstract In this talk, we will investigate how the late, great Leonhard Euler P1 2 2 originally proved the identity ζ(2) = n=1 1=n = π =6 way back in 1735. This will briefly lead us astray into the bewildering forest of com- plex analysis where we will point to some important theorems and lemmas whose proofs are, alas, too far off the beaten path. On our journey out of said forest, we will visit the temple of the Riemann zeta function and marvel at its significance in number theory and its relation to the prob- lem at hand, and we will bow to the uber-famously-unsolved Riemann hypothesis. From there, we will travel far and wide through the kingdom of analysis, whizzing through a number N of proofs of the same original fact in this talk's title, where N is not to exceed 5 but is no less than 3. Nothing beyond a familiarity with standard calculus and the notion of imaginary numbers will be presumed. Note: These were notes I typed up for myself to give this seminar talk. I only got through a portion of the material written down here in the actual presentation, so I figured I'd just share my notes and let you read through them. Many of these proofs were discovered in a survey article by Robin Chapman (linked below). I chose particular ones to work through based on the intended audience; I also added a section about justifying the sin(x) \factoring" as an infinite product (a fact upon which two of Euler's proofs depend) and one about the Riemann Zeta function and its use in number theory. -
![Arxiv:1904.09040V2 [Math.NT]](https://docslib.b-cdn.net/cover/6140/arxiv-1904-09040v2-math-nt-1446140.webp)
Arxiv:1904.09040V2 [Math.NT]
PERIODICITIES FOR TAYLOR COEFFICIENTS OF HALF-INTEGRAL WEIGHT MODULAR FORMS PAVEL GUERZHOY, MICHAEL H. MERTENS, AND LARRY ROLEN Abstract. Congruences of Fourier coefficients of modular forms have long been an object of central study. By comparison, the arithmetic of other expansions of modular forms, in particular Taylor expansions around points in the upper-half plane, has been much less studied. Recently, Romik made a conjecture about the periodicity of coefficients around τ0 = i of the classical Jacobi theta function θ3. Here, we generalize the phenomenon observed by Romik to a broader class of modular forms of half-integral weight and, in particular, prove the conjecture. 1. Introduction Fourier coefficients of modular forms are well-known to encode many interesting quantities, such as the number of points on elliptic curves over finite fields, partition numbers, divisor sums, and many more. Thanks to these connections, the arithmetic of modular form Fourier coefficients has long enjoyed a broad study, and remains a very active field today. However, Fourier expansions are just one sort of canonical expansion of modular forms. Petersson also defined [17] the so-called hyperbolic and elliptic expansions, which instead of being associated to a cusp of the modular curve, are associated to a pair of real quadratic numbers or a point in the upper half-plane, respectively. A beautiful exposition on these different expansions and some of their more recent connections can be found in [8]. In particular, there Imamoglu and O’Sullivan point out that Poincar´eseries with respect to hyperbolic expansions include the important examples of Katok [11] and Zagier [26], which are the functions which Kohnen later used [15] to construct the holomorphic kernel for the Shimura/Shintani lift. -

Pi, Fourier Transform and Ludolph Van Ceulen
3rd TEMPUS-INTCOM Symposium, September 9-14, 2000, Veszprém, Hungary. 1 PI, FOURIER TRANSFORM AND LUDOLPH VAN CEULEN M.Vajta Department of Mathematical Sciences University of Twente P.O.Box 217, 7500 AE Enschede The Netherlands e-mail: [email protected] ABSTRACT The paper describes an interesting (and unexpected) application of the Fast Fourier transform in number theory. Calculating more and more decimals of p (first by hand and then from the mid-20th century, by digital computers) not only fascinated mathematicians from ancient times but kept them busy as well. They invented and applied hundreds of methods in the process but the known number of decimals remained only a couple of hundred as of the late 19th century. All that changed with the advent of the digital computers. And although digital computers made possible to calculate thousands of decimals, the underlying methods hardly changed and their convergence remained slow (linear). Until the 1970's. Then, in 1976, an innovative quadratic convergent formula (based on the method of algebraic-geometric mean) for the calculation of p was published independently by Brent [10] and Salamin [14]. After their breakthrough, the Borwein brothers soon developed cubically and quartically convergent algorithms [8,9]. In spite of the incredible fast convergence of these algorithms, it was the application of the Fast Fourier transform (for multiplication) which enhanced their efficiency and reduced computer time [2,12,15]. The author would like to dedicate this paper to the memory of Ludolph van Ceulen (1540-1610), who spent almost his whole life to calculate the first 35 decimals of p. -

Construction of Almost Periodic Sequences with Given Properties
Electronic Journal of Differential Equations, Vol. 2008(2008), No. 126, pp. 1–22. ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu ftp ejde.math.txstate.edu (login: ftp) CONSTRUCTION OF ALMOST PERIODIC SEQUENCES WITH GIVEN PROPERTIES MICHAL VESELY´ Abstract. We define almost periodic sequences with values in a pseudometric space X and we modify the Bochner definition of almost periodicity so that it remains equivalent with the Bohr definition. Then, we present one (easily modifiable) method for constructing almost periodic sequences in X . Using this method, we find almost periodic homogeneous linear difference systems that do not have any non-trivial almost periodic solution. We treat this problem in a general setting where we suppose that entries of matrices in linear systems belong to a ring with a unit. 1. Introduction First of all we mention the article [9] by Fan which considers almost periodic sequences of elements of a metric space and the article [22] by Tornehave about almost periodic functions of the real variable with values in a metric space. In these papers, it is shown that many theorems that are valid for complex valued sequences and functions are no longer true. For continuous functions, it was observed that the important property is the local connection by arcs of the space of values and also its completeness. However, we will not use their results or other theorems and we will define the notion of the almost periodicity of sequences in pseudometric spaces without any conditions, i.e., the definition is similar to the classical definition of Bohr, the modulus being replaced by the distance. -

Proportional Integral (PI) Control the PI Controller “Ideal” Form of the PI Controller Kc CO=CO + Kc E(T) + E(T)Dt Bias I Where: CO = Controller Output Signal
Proportional Integral (PI) Control The PI Controller “Ideal” form of the PI Controller Kc CO=CO + Kc e(t) + e(t)dt bias I where: CO = controller output signal CObias = controller bias or null value PV = measured process variable SP = set point e(t) = controller error = SP – PV Kc = controller gain (a tuning parameter) = controller reset time (a tuning parameter) • is in denominator so smaller values provide a larger weighting to the integral term • has units of time, and therefore is always positive Function of the Proportional Term Proportional term acts on e(t) = SP – PV e(25) = 4 e(40) = – 2 PV SP Copyright © 2007 by Control Station, Inc. All Rights Reserved 25 40 Time (minutes) • The proportional term, Kce(t), immediately impacts CO based on the size of e(t) at a particular time t • The past history and current trajectory of the controller error have no influence on the proportional term computation Class Exercise – Calculate Error and Integral Control Calculation is Based on Error, e(t) Proportional term acts on Same data plotted as e(t) = SP – PV e(t) controller error, e(t) e(25) = 4 e(40) = –2 PV SP e(40) = –2 0 e(25) = 4 Copyright © 2007 by Control Station, Inc. All Rights Reserved Copyright © 2007 by Control Station, Inc. All Rights Reserved 25 40 25 40 Time (minutes) Time (minutes) • Here is identical data plotted two ways • To the right is a plot of error, where: e(t) = SP – PV • Error e(t) continually changes size and sign with time Function of the Integral Term • The integral term continually sums up error, e(t) • Through constant summing, integral action accumulates influence based on how long and how far the measured PV has been from SP over time.