Understanding Digital Potentiometer Resistor Variations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Using Rctime to Measure Resistance
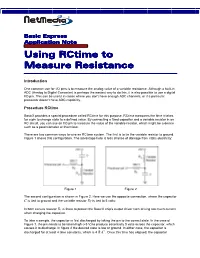
Basic Express Application Note Using RCtime to Measure Resistance Introduction One common use for I/O pins is to measure the analog value of a variable resistance. Although a built-in ADC (Analog to Digital Converter) is perhaps the easiest way to do this, it is also possible to use a digital I/O pin. This can be useful in cases where you don't have enough ADC channels, or if a particular processor doesn't have ADC capability. Procedure RCtime BasicX provides a special procedure called RCtime for this purpose. RCtime measures the time it takes for a pin to change state to a defined value. By connecting a fixed capacitor and a variable resistor in an RC circuit, you can use an I/O pin to measure the value of the variable resistor, which might be a device such as a potentiometer or thermistor. There are two common ways to wire an RCtime system. The first is to tie the variable resistor to ground. Figure 1 shows this configuration. The advantage here is less chance of damage from static electricity: Figure 1 Figure 2 The second configuration is shown in Figure 2. Here we use the opposite connection, where the capacitor C is tied to ground and the variable resistor RV is tied to 5 volts: In both circuits resistor R1 is there to protect the BasicX chip's output driver from driving too much current when charging the capacitor. To take a sample, the capacitor is first discharged by taking the pin to the correct state. In the case of Figure 1, the pin needs to be taken high (+5 V) to produce essentially 0 volts across the capacitor, which causes it to discharge. -

Memristor-The Future of Artificial Intelligence L.Kavinmathi, C.Gayathri, K.Kumutha Priya
International Journal of Scientific & Engineering Research, Volume 5, Issue 4, April-2014 358 ISSN 2229-5518 Memristor-The Future of Artificial Intelligence L.kavinmathi, C.Gayathri, K.Kumutha priya Abstract- Due to increasing demand on miniaturization and low power consumption, Memristor came into existence. Our design exploration is Reconfigurable Threshold Logic Gates based Programmable Analog Circuits using Memristor. Thus a variety of linearly separable and non- linearly separable logic functions such as AND, OR, NAND, NOR, XOR, XNOR have been realized using Threshold logic gate using Memristor. The functionality can be changed between these operations just by varying the resistance of the Memristor. Based on this Reconfigurable TLG, various Programmable Analog circuits can be built using Memristor. As an example of our approach, we have built Programmable analog Gain amplifier demonstrating Memristor-based programming of Threshold, Gain and Frequency. As our idea consisting of Programmable circuit design, in which low voltages are applied to Memristor during their operation as analog circuit element and high voltages are used to program the Memristor’s states. In these circuits the role of memristor is played by Memristor Emulator developed by us using FPGA. Reconfigurable is the option we are providing with the present system, so that the resistance ranges are varied by preprogram too. Index Terms— Memristor, TLG-threshold logic gates, Programmable Analog Circuits, FPGA-field programmable gate array, MTL- memristor threshold logic, CTL-capacitor Threshold logic, LUT- look up table. —————————— ( —————————— 1 INTRODUCTION CCORDING to Chua’s [founder of Memristor] definition, 9444163588. E-mail: [email protected] the internal state of an ideal Memristor depends on the • L.kavinmathi is currently pursuing bachelors degree program in electronics A and communication engineering in tagore engineering college under Anna integral of the voltage or current over time. -

Lab 1: the Bipolar Junction Transistor (BJT): DC Characterization
Lab 1: The Bipolar Junction Transistor (BJT): DC Characterization Electronics II Contents Introduction 2 Day 1: BJT DC Characterization 2 Background . 2 BJT Operation Regions . 2 (i) Saturation Region . 4 (ii) Active Region . 4 (iii) Cutoff Region . 5 Part 1: Diode-Like Behavior of BJT Junctions, and BJT Type 6 Experiment . 6 Creating Your Own File . 6 Report..................................................... 8 Part 2: BJT IC vs. VCE Characteristic Curves - Point by Point Plotting 8 Prelab . 8 Experiment . 8 Creating Your Own File . 8 Parameter Sweep . 9 Report..................................................... 10 Part 3: The Current Mirror 11 Experiment . 12 Simulation . 12 Checkout . 12 Report..................................................... 13 1 ELEC 3509 Electronics II Lab 1 Introduction When designing a circuit, it is important to know the properties of the devices that you will be using. This lab will look at obtaining important device parameters from a BJT. Although many of these can be obtained from the data sheet, data sheets may not always include the information we want. Even if they do, it is also useful to perform our own tests and compare the results. This process is called device characterization. In addition, the tests you will be performing will help you get some experience working with your tools so you don't waste time fumbling around with them in future labs. In Day 1, you will be looking at the DC characteristics of your transistor. This will give you an idea of what the I-V curves look like, and how you would measure them. You will also have to build and test a current mirror, which should give you an idea of how they work and where their limitations are. -

Ltspice Tutorial Part 4- Intermediate Circuits
Sim Lab 8 P art 2 – E fficiency R evisited Prerequisites ● Please make sure you have completed the following: ○ LTspice tutorial part 1-4 Learn ing Objectives 1. Build circuits that control the motor speed with resistor network and with MOSFET usingLTSpice XVII. 2. By calculating the power efficiency of two speed control circuits, learn that the use of MOSFET in a speed control circuit can increase the power efficiency. Speed control by resist or network ● First, place the components as the following figure. For convenience, we use a resistor in series with an inductor to model the motor. Set the values of resistors, the inductor and the voltage source like the figure. Speed control by resist or network ● Next, connect the circuit as the following figure. We first connect the left three 100 Ω resistors to the circuit. Also, add a label net called “Vmotor_1” and place it right above R6. W e want to monitor the voltage across the motor in this way. ● At the same time, like what we did to a capacitor in previous labs, we also need to set initial conditions for an inductor. Click “Edit” -> Spice Directive -> set “.ic i(L1) = 0”. Speed control by resist or network ● Next, set the simulation condition as the left figure. We are ready to start the simulation. ● The reason to set the stop time as 0.1ms is to observe the change of Vmotor_1 through time from a transient state to steady state. Motor Model Speed control by resist or network ● Run the simulation. ● Plot Vmotor_1 and the current flowing through R6. -
Basic DC Motor Circuits
Basic DC Motor Circuits Living with the Lab Gerald Recktenwald Portland State University [email protected] DC Motor Learning Objectives • Explain the role of a snubber diode • Describe how PWM controls DC motor speed • Implement a transistor circuit and Arduino program for PWM control of the DC motor • Use a potentiometer as input to a program that controls fan speed LWTL: DC Motor 2 What is a snubber diode and why should I care? Simplest DC Motor Circuit Connect the motor to a DC power supply Switch open Switch closed +5V +5V I LWTL: DC Motor 4 Current continues after switch is opened Opening the switch does not immediately stop current in the motor windings. +5V – Inductive behavior of the I motor causes current to + continue to flow when the switch is opened suddenly. Charge builds up on what was the negative terminal of the motor. LWTL: DC Motor 5 Reverse current Charge build-up can cause damage +5V Reverse current surge – through the voltage supply I + Arc across the switch and discharge to ground LWTL: DC Motor 6 Motor Model Simple model of a DC motor: ❖ Windings have inductance and resistance ❖ Inductor stores electrical energy in the windings ❖ We need to provide a way to safely dissipate electrical energy when the switch is opened +5V +5V I LWTL: DC Motor 7 Flyback diode or snubber diode Adding a diode in parallel with the motor provides a path for dissipation of stored energy when the switch is opened +5V – The flyback diode allows charge to dissipate + without arcing across the switch, or without flowing back to ground through the +5V voltage supply. -

Digital Potentiometers Design Guide
Analog and Interface Products Digital Potentiometers Design Guide www.microchip.com/analog Digital Potentiometer Solutions Microchip’s Family of Digital Potentiometers Microchip offers a wide range of devices that allow you to select the best fit for your application needs. Some of the selection options include: ■ End-to-end resistance (RAB) values ■ Resistor network confi gurations • 2.1 kΩ to 100 kΩ (typical) • Potentiometer (voltage divider) ■ Resolution • Rheostat (variable resistor) • 6-bit (64 steps) ■ Single, dual and quad potentiometer options • 7-bit (128/129 steps) ■ Different package options • 8-bit (256/257 steps) ■ Special features ■ Serial interfaces • Shutdown mode • Up/down • WiperLock™ technology • SPI ■ Low-power options • I2C ■ Low-voltage options (1.8V) ■ Memory types ■ High-voltage options (36V or ±18V) • Volatile • Non-volatile (EEPROM) Microchip offers digital potentiometer devices with typical end-to-end resistances of 2.1 kΩ, 5 kΩ, 10 kΩ, 50 kΩ and 100 kΩ. These devices are available in 6, 7 or 8 bits of resolution. The serial interface options allow you to easily integrate the device into your application. For some applications, the simple up/down interface will be adequate. Higher-resolution devices (7-bit, 8-bit) often require direct read/write to the wiper register. This is supported with SPI or I2C interfaces. SPI is simpler to implement, but I2C uses only two signals (pins) and can support multiple devices on the serial bus without additional pins. Microchip offers both volatile and non-volatile (EEPROM) devices, allowing you the flexibility to optimize your system design. The integrated EEPROM option allows you to save digital potentiometer settings at power-down and restore to its original value and power-up. -

Conductive Plastic and Cermet MODPOT Panel Potentiometers
Series 70 Custom Potentiometer Designer Guide .015 [0.38mm] 1/8 [3.18mm] .250 .055 [6.35mm] [1.47mm] 36 ROUTE 10, STE 6 • EAST HANOVER • NEW JERSEY Phone 973-887-2550 • T oll Free 1-800-631-8083 • Fax 973-887-1940 Internet http://www • 07936 .potentiometers.com POT PROTOTYPES PRONTO! Dual Potentiometer, Dual Rotary Switch, Single Potentiometer, Single Rotary Switch, Single Potentiometer, Dual Potentiometer, Single Flatted 1/8” Shaft, Solder Lugs Single Slotted 1/4” Shaft, Solder Lugs Single 1/4” Shaft, Solder Lugs Dual Shaft, Solder Lugs Dual Potentiometer, Single Potentiometer, Triple Potentiometer, Quad Potentiometer, Single 1/4” Shaft, PC Pins Single Slotted 1/4” Shaft, PC Pins Single 1/8” Shaft, PC Pins Single 1/4” Shaft, Solder Lugs Now almost any special combination potentiometer you specify can be manufactured and shipped soon after your order is received. Since Clarosystem and Mod Pot potentiometers are modular in construction, we can produce prototype quantities of 1/2 or 5/8 inch square, conductive plastic, cermet, or hot molded carbon pots for you in just a few hours . and even production quantities in a matter of days with our VIP (Very Important Potentiometer) service! Over one billion combinations of single, dual, triple, quad arrangements, push-pull or rotary switches and hundreds of shaft terminal variations can be produced. If you need a potentiometer and you need it fast, call our product manager or fax us your requirements using the WHY WAIT? Custom Potentiometer Order Forms included in this catalog. 36 Route 10, STE 6 East Hanover, NJ 07936-0436 Phone 973-887-2550 Toll Free 1-800-631-8083 FAX 973-887-1940 http://www.potentiometers.com Series 70, 72 Hot-Molded Carbon*, Conductive Plastic (CP), and Cermet Panel Potentiometers Unmatched Flexibility The MOD POT® Family includes: Series 70 – Metal or Plastic Shaft – Metal Bushing. -

AN-1206 Application Note
AN-1206 APPLICATION NOTE One Technology Way • P. O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • www.analog.com Variable Gain Inverting Amplifier Using the AD5292 Digital Potentiometer and the OP184 Op Amp VDD CIRCUIT FUNCTION AND BENEFITS R3 1kΩ +15V/+30V This circuit provides a low cost, high voltage, variable gain V+ OP184 VOUT inverting amplifier using the AD5292 digital potentiometer V V– IN –15V/GND R2 in conjunction with the OP184 operational amplifier. 4.99kΩ ± 1% C1 V 10pF SS The circuit offers 1024 different gains, controllable through an SPI-compatible serial digital interface. The ±1% resistor tolerance VDD R +15V/+30V AW performance of the AD5292 provides low gain error over the RAB 20kΩ full resistor range, as shown in Figure 2. AD5292 SERIAL INTERFACE VSS The circuit supports input and output rail to rail for both single –15V/GND 08426-001 supply operation at +30 V and dual supply operation at ±15 V; Figure 1. Variable Gain Inverting Amplifier (Simplified Schematic: and is capable of delivering up to ±6.5 mA output current. Decoupling and All Connections Not Shown) In addition, the AD5292 has an internal 20-times programmable The circuit gain equation is memory that allows a customized gain setting at power-up. The (1024 − D)× RAB circuit provides accuracy, low noise, low THD, and is well suited G = − 1024 (3) for signal instrumentation conditioning. R2 CIRCUIT DESCRIPTION where D is the code loaded in the digital potentiometer. Table 1. Devices Connected/Referenced When the circuit input is an ac signal, the parasitic capacitances Product Description of the digital potentiometer can cause undesirable oscillation in AD5292 10-bit, 1% resistor tolerance digital potentiometer the output. -

EXPERIMENT 6 REPORT Bipolar Junction Transistor (BJT) Characteristics
Name & Surname: University of Bahçeşehir Engineering Faculty ID: Electrical-Electronics Department Date: EXPERIMENT 6 REPORT Bipolar Junction Transistor (BJT) Characteristics Objectives: 1. To determine transistor type (npn, pnp),terminals, and material using a DMM 2. To graph the collector characteristics of a transistor using experimental methods 3. To determine the value of alpha and beta ratios of a transistor. Equipment Required: (1) 1 kΩ (1) 220 kΩ (1) 5 kΩ - POT (1) 1 MΩ- POT (1) 2N3904 (1) Transistor without terminal identification. Theory: Bipolar transistors are made of either silicon (Si) or germanium (Ge). Their structure consists of two layers of n-type material separated by a layer of p-type material (NPN), or two layers of p-type material separated by a layer of n-type material (PNP). In either case, the center layer forms the base of the transistor, while the external layers form the collector and the emitter of the transistor. It is this structure that determines the polarities of any voltages applied and the direction of the electron or conventional current flow. With regard to the latter, the arrow at the emitter terminal of the transistor symbol for either type of transistor points in the direction of conventional current flow and thus provides a useful reference (Figure 5.2.) one part of this experiment will demonstrate how you can determine the type of transistor and its material, and identify its three terminals. The relationship between the voltages and the currents associated with a bipolar junction transistor under various operating conditions determine its performance. These relationships are collectively known as the characteristics of the transistors. -

Replacing Digital Potentiometers with Precision Dacs
Replacing Digital Potentiometers with Precision DACs However, a majority of DACs include an output buffer. When Can a Digital Potentiometer (DPOT) be In addition, some DACs also include a reference, and Replaced by a Precision Digital-to-Analog a reference buffer. The reference buffer ensures that Converter (DAC)? the voltage of the DAC output is known, while the This seems like a simple question, but to thoroughly output buffer allows for current drive capability. understand the trade-offs of replacing a DPOT with a PVDD DAC, it is important to understand the difference LOAD VCC SENSOR between the two device types and how they are used. (A) ILOAD (B) H VREF H DPOT H DPOT R/8 DAC W R/8 + ± REF DPOT MCU W ± + R/8 R/8 L VSET R/8 R/8 R L SET R/8 R/8 ± R/8 R/8 OUTPUT W + (C) I2C/SPI I2C/SPI VCC R/8 R/8 H ± Digital Logic and NVM Digital Logic and NVM DPOT R/8 R/8 W + + LOAD R/8 R/8 VLOAD L - L Figure 1. Figure 2. A DPOT is a digitally controlled IC that mimics a How are DPOTs Used? manual predecessor: the potentiometer. It consists of DPOTs have many applications where they are well- a resistor string and switches that connect the out suited. For example, they can be used as a resistor (also called the "wiper") to the tap points on the string. divider of a static (or dynamic) voltage resistor divider, A controller that interprets digital commands sets the or as a variable resistor in an op amp feedback switches, which connect the wiper to the desired tap network. -

X9C102, X9C103, X9C104, X9C503 Datasheet
DATASHEET X9C102, X9C103, X9C104, X9C503 FN8222 Digitally Controlled Potentiometer (XDCP™) Rev 4.00 Jan 11, 2019 The X9C102, X9C103, X9C104, X9C503 are digitally Features controlled (XDCP) potentiometers. The device consists of a • Solid-State Potentiometer resistor array, wiper switches, a control section, and nonvolatile memory. The wiper position is controlled by a • Three-Wire Serial Interface three-wire interface. • 100 Wiper Tap Points The potentiometer is implemented by a resistor array - Wiper Position Stored in Non-volatile Memory and composed of 99 resistive elements and a wiper switching Recalled on Power-up network. Between each element and at either end are tap • 99 Resistive Elements points accessible to the wiper terminal. The position of the wiper element is controlled by the CS, U/D, and INC inputs. - Temperature Compensated The position of the wiper can be stored in non-volatile - End-to-End Resistance, ±20% memory and then be recalled upon a subsequent power-up - Terminal Voltages, ±5V operation. • Low Power CMOS The device can be used as a three-terminal potentiometer or -VCC = 5V as a two-terminal variable resistor in a wide variety of - Active Current, 3mA max. applications ranging from control to signal processing to - Standby Current, 750µA max. parameter adjustment. • High Reliability Pinout - Endurance, 100,000 Data Changes per Bit X9C102, X9C103, X9C104, X9C503 - Register Data Retention, 100 years (8 LD SOIC, 8 LD PDIP) TOP VIEW • X9C102 = 1k • X9C103 = 10k INC 1 8 V CC • X9C503 = 50k U/D 2 7 CS • X9C104 = 100k -

ON Semiconductor Is an Equal Opportunity/Affirmative Action Employer
ON Semiconductor Is Now To learn more about onsemi™, please visit our website at www.onsemi.com onsemi and and other names, marks, and brands are registered and/or common law trademarks of Semiconductor Components Industries, LLC dba “onsemi” or its affiliates and/or subsidiaries in the United States and/or other countries. onsemi owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of onsemi product/patent coverage may be accessed at www.onsemi.com/site/pdf/Patent-Marking.pdf. onsemi reserves the right to make changes at any time to any products or information herein, without notice. The information herein is provided “as-is” and onsemi makes no warranty, representation or guarantee regarding the accuracy of the information, product features, availability, functionality, or suitability of its products for any particular purpose, nor does onsemi assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages. Buyer is responsible for its products and applications using onsemi products, including compliance with all laws, regulations and safety requirements or standards, regardless of any support or applications information provided by onsemi. “Typical” parameters which may be provided in onsemi data sheets and/ or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. onsemi does not convey any license under any of its intellectual property rights nor the rights of others.