Arxiv:1909.02884V1 [Physics.Class-Ph]
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
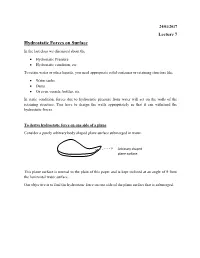
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Ch. 8 Deflections Due to Bending
446.201A (Solid Mechanics) Professor Youn, Byeng Dong CH. 8 DEFLECTIONS DUE TO BENDING Ch. 8 Deflections due to bending 1 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong 8.1 Introduction i) We consider the deflections of slender members which transmit bending moments. ii) We shall treat statically indeterminate beams which require simultaneous consideration of all three of the steps (2.1) iii) We study mechanisms of plastic collapse for statically indeterminate beams. iv) The calculation of the deflections is very important way to analyze statically indeterminate beams and confirm whether the deflections exceed the maximum allowance or not. 8.2 The Moment – Curvature Relation ▶ From Ch.7 à When a symmetrical, linearly elastic beam element is subjected to pure bending, as shown in Fig. 8.1, the curvature of the neutral axis is related to the applied bending moment by the equation. ∆ = = = = (8.1) ∆→ ∆ For simplification, → ▶ Simplification i) When is not a constant, the effect on the overall deflection by the shear force can be ignored. ii) Assume that although M is not a constant the expressions defined from pure bending can be applied. Ch. 8 Deflections due to bending 2 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong ▶ Differential equations between the curvature and the deflection 1▷ The case of the large deflection The slope of the neutral axis in Fig. 8.2 (a) is = Next, differentiation with respect to arc length s gives = ( ) ∴ = → = (a) From Fig. 8.2 (b) () = () + () → = 1 + Ch. 8 Deflections due to bending 3 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong → = (b) (/) & = = (c) [(/)]/ If substitutng (b) and (c) into the (a), / = = = (8.2) [(/)]/ [()]/ ∴ = = [()]/ When the slope angle shown in Fig. -

Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics
Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics Vlado A. Lubarda Montenegrin Academy of Sciences and Arts Division of Natural Sciencies OPN, CANU 2012 Contents Preface xi Part 1. LINEAR ELASTICITY 1 Chapter 1. Anisotropic Nonuniform Lam´eProblem 2 1.1. Elastic Anisotropy 2 1.2. Radial Nonuniformity 3 1.3. Governing Differential Equations 4 1.4. Stress and Displacement Expressions 5 1.5. Traction Boundary Conditions 6 1.6. Applied External Pressure 7 1.7. Plane Stress Approximation 8 1.8. Generalized Plane Stress 10 References 11 Chapter 2. Stretching of a Hollow Circular Membrane 12 2.1. Introduction 12 2.2. Basic Equations 12 2.3. Traction Boundary Conditions 13 2.4. Mixed Boundary Conditions 16 References 18 Chapter 3. Energy of Circular Inclusion with Sliding Interface 21 3.1. Energy Expressions for Sliding Inclusion 21 3.2. Energies due to Eigenstrain 22 3.3. Energies due to Remote Loading 23 3.4. Inhomogeneity under Remote Loading 25 References 26 Chapter 4. Eigenstrain Problem for Nonellipsoidal Inclusions 27 4.1. Eshelby Property 27 4.2. Displacement Expression 27 4.3. The Shape of an Inclusion 28 4.4. Other Shapes of Inclusions 30 References 32 Chapter 5. Circular Loads on the Surface of a Half-Space 33 5.1. Displacements due to Vertical Ring Load 33 5.2. Alternative Displacement Expressions 34 iii iv CONTENTS 5.3. Tangential Line Load 37 5.4. Alternative Expressions 39 5.5. Reciprocal Properties 43 References 45 Chapter 6. Elasticity Tensors of Anisotropic Materials 46 6.1. Elastic Moduli of Transversely Isotropic Materials 46 6.2. -

Chapter 6: Bending
Chapter 6: Bending Chapter Objectives Determine the internal moment at a section of a beam Determine the stress in a beam member caused by bending Determine the stresses in composite beams Bending analysis This wood ruler is held flat against the table at the left, and fingers are poised to press against it. When the fingers apply forces, the ruler deflects, primarily up or down. Whenever a part deforms in this way, we say that it acts like a “beam.” In this chapter, we learn to determine the stresses produced by the forces and how they depend on the beam cross-section, length, and material properties. Support types: Load types: Concentrated loads Distributed loads Concentrated moments Sign conventions: How do we define whether the internal shear force and bending moment are positive or negative? Shear and moment diagrams Given: Find: = 2 kN , , Shear- = 1 m Bending moment diagram along the beam axis Example: cantilever beam Given: Find: = 4 kN , , Shear- = 1.5 kN/m Bending moment = 1 m diagram along the beam axis 2 Relations Among Load, Shear and Bending Moments Relationship between load and shear: Relationship between shear and bending moment: Wherever there is an external concentrated force, or a concentrated moment, there will be a change (jump) in shear or moment respectively. Concentrated force F acting upwards: Concentrated Moment acting clockwise Shear and moment diagrams Given: Use the graphical = 2 kN method the sketch = 1 m diagrams for V(x) and M(x) Example: cantilever beam Given: Use the graphical = 4 kN method the sketch = 1.5 kN/m diagrams for V(x) and = 1 m M(x) 2 Pure bending Take a flexible strip, such as a thin ruler, and apply equal forces with your fingers as shown. -

Equation of Motion for Viscous Fluids
1 2.25 Equation of Motion for Viscous Fluids Ain A. Sonin Department of Mechanical Engineering Massachusetts Institute of Technology Cambridge, Massachusetts 02139 2001 (8th edition) Contents 1. Surface Stress …………………………………………………………. 2 2. The Stress Tensor ……………………………………………………… 3 3. Symmetry of the Stress Tensor …………………………………………8 4. Equation of Motion in terms of the Stress Tensor ………………………11 5. Stress Tensor for Newtonian Fluids …………………………………… 13 The shear stresses and ordinary viscosity …………………………. 14 The normal stresses ……………………………………………….. 15 General form of the stress tensor; the second viscosity …………… 20 6. The Navier-Stokes Equation …………………………………………… 25 7. Boundary Conditions ………………………………………………….. 26 Appendix A: Viscous Flow Equations in Cylindrical Coordinates ………… 28 ã Ain A. Sonin 2001 2 1 Surface Stress So far we have been dealing with quantities like density and velocity, which at a given instant have specific values at every point in the fluid or other continuously distributed material. The density (rv ,t) is a scalar field in the sense that it has a scalar value at every point, while the velocity v (rv ,t) is a vector field, since it has a direction as well as a magnitude at every point. Fig. 1: A surface element at a point in a continuum. The surface stress is a more complicated type of quantity. The reason for this is that one cannot talk of the stress at a point without first defining the particular surface through v that point on which the stress acts. A small fluid surface element centered at the point r is defined by its area A (the prefix indicates an infinitesimal quantity) and by its outward v v unit normal vector n . -

2 Review of Stress, Linear Strain and Elastic Stress- Strain Relations
2 Review of Stress, Linear Strain and Elastic Stress- Strain Relations 2.1 Introduction In metal forming and machining processes, the work piece is subjected to external forces in order to achieve a certain desired shape. Under the action of these forces, the work piece undergoes displacements and deformation and develops internal forces. A measure of deformation is defined as strain. The intensity of internal forces is called as stress. The displacements, strains and stresses in a deformable body are interlinked. Additionally, they all depend on the geometry and material of the work piece, external forces and supports. Therefore, to estimate the external forces required for achieving the desired shape, one needs to determine the displacements, strains and stresses in the work piece. This involves solving the following set of governing equations : (i) strain-displacement relations, (ii) stress- strain relations and (iii) equations of motion. In this chapter, we develop the governing equations for the case of small deformation of linearly elastic materials. While developing these equations, we disregard the molecular structure of the material and assume the body to be a continuum. This enables us to define the displacements, strains and stresses at every point of the body. We begin our discussion on governing equations with the concept of stress at a point. Then, we carry out the analysis of stress at a point to develop the ideas of stress invariants, principal stresses, maximum shear stress, octahedral stresses and the hydrostatic and deviatoric parts of stress. These ideas will be used in the next chapter to develop the theory of plasticity. -

Basic Solid Mechanics Other Engineering Titles of Related Interest
Basic Solid Mechanics Other engineering titles of related interest Automation with Programmable Logic Controllers Peter Rohner Design and Manufacture An Integrated Approach Rod Black Dynamics G.E. Drabble Elementary Engineering Mechanics G.E. Drabble Finite Elements A Gentle Introduction D. Henwood and J. Bonet Fluid Mechanics Martin Widden Introduction to Engineering Materials V.B. John Introduction to Internal Combustion Engines, Second Edition Richard Stone Mechanics of Machines, Second Edition G.H. Ryder and M.D. Bennett Thermodynamics J. Simonson Basic Solid Mechanics D.W.A. Rees Department of Manufacturing and Engineering Systems, Brunei University MACMILLAN ~~:> D.W.A. Rees 1997 All rights reserved. No reproduction, copy or transmission of this publication may be made without written permission. No paragraph of this publication may be reproduced, copied or transmitted save with written permission or in accordance with the provisions of the Copyright, Designs and Patents Act 1988, or under the terms of any licence permitting limited copying issued by the Copyright Licensing Agency, 90 Tottenham Court Road, London W1P 9HE. Any person who does any unauthorised act in relation to this publication may be liable to criminal prosecution and civil claims for damages. The author has asserted his rights to be identified as the author of this work in accordance with the Copyright, Designs and Patents Act 1988. First published 1997 by MACMILLAN PRESS LTD Houndmills, Basingstoke, Hampshire RG21 6XS and London Companies and representatives throughout the world ISBN 978-0-333-66609-8 ISBN 978-1-349-14161-6 (eBook) DOI 10.1007/978-1-349-14161-6 A catalogue record for this book is available from the British Library. -
ENGN1750 Advanced Mechanics of Solids
ENGN1750 Advanced Mechanics of Solids Pradeep R. Guduru Office: Barus Holley& Holley 729; Tel: 863-3362 Email: [email protected] David Henann Office Barus & Holley 604, Tel: 863-2319 [email protected] Course Website http://www.brown.edu/Departments/Engineering/Labs/Gudurulab/E NGN1750/ Tuesday, Thursday; 2:30 – 3:50pm, B&H 159 • Weekly section will be held in the instructional computer lab. Course Outline 1.Introduction 6. Boundary value problems for linear elastic solids 1.1 Scope of the course 6.1 Field equations for plane strain deformation 1.2 Basic concepts of solid mechanics 6.2 Thick walled pressure vessel 1.3 Overview of finite element method in computational solid mechanics 6.3 Field equations for plane stress deformation 2. Mathematical background 6.3 Plate with hole in tension, stress concentration 2.1 Vector algebra 7. Variational methods for elastic solids 2.2 Index notations 7.1 Principle of virtual work 2.3 Matrices and tensors 7.2 Variational statement of governing equations7.3 Work and energy 2.4 Vector and tensor calculus theorems in solid mechanics7.4 Derivations of field equations for thin 3. Stress in a solid plate in bending 3.1 Body forces, surface forces and traction vector at a point on the surface 8.The finite element method for numerical analyses 3.2 Stress tensor at a point 8.1 Finite elements 3.3 Principal stresses at a point 8.2 Element interpolation functions 3.4 Balance of momentum and equilibrium equations 8.3 Element strains, stresses and strain energy density 4. Strain in a solid 8.4 Element Stiffness Matrix 4.1 Displacement field in a deformed solid 8.5 Global Stiffness Matrix 4.2 Strain tensor in a Solid 8.6 Boundary Loading 4.3 Principal strains at a point 9. -

ME 333C - Mechanics/Continuum Mechanics
ME 333C - Mechanics/Continuum Mechanics Tue/Thu 10:30-11:50, Hewlett 201 Rijk de Rooij ([email protected]) Ellen Kuhl ([email protected]) Summary. Introduction to linear and nonlinear continuum mechanics of solids; Introduction to tensor algebra and tensor analysis; Kinematics of motion; Balance equations of mass, linear and angular momentum, energy, and entropy; Constitutive equations of isotropic and anisotropic hyperelastic solids; Introduction to numerical solution techniques. Although the basic concepts of continuum mechanics have been established more than five decades ago, the 21st century faces many new and exciting potential applications of continuum mechanics that go way beyond the standard classical theory. When applying continuum mechanics to these challenging new phenomena, it is important to understand the main three ingredients of continuum mechanics: the kinematic equations, the balance equations and the constitutive equations. After a brief revision of the relevant equations in tensor algebra and analysis, this class will introduce the basic concepts of finite strain kinematics. We will then discuss the balance equations for mass, linear and angular momentum, energy, and entropy. While all these equations are general and valid for any kind of material, the last set of equations, the constitutive equations, specifies particular subclasses of materials. Grading Homework 30 % three homework assignments, 10% each Final 50 % closed book, closed notes, one single page cheat sheet Project 20 % written evaluation of a manuscript -

7.4 the Elementary Beam Theory
Section 7.4 7.4 The Elementary Beam Theory In this section, problems involving long and slender beams are addressed. As with pressure vessels, the geometry of the beam, and the specific type of loading which will be considered, allows for approximations to be made to the full three-dimensional linear elastic stress-strain relations. The beam theory is used in the design and analysis of a wide range of structures, from buildings to bridges to the load-bearing bones of the human body. 7.4.1 The Beam The term beam has a very specific meaning in engineering mechanics: it is a component that is designed to support transverse loads, that is, loads that act perpendicular to the longitudinal axis of the beam, Fig. 7.4.1. The beam supports the load by bending only. Other mechanisms, for example twisting of the beam, are not allowed for in this theory. applied force applied pressure cross section roller support pin support Figure 7.4.1: A supported beam loaded by a force and a distribution of pressure It is convenient to show a two-dimensional cross-section of the three-dimensional beam together with the beam cross section, as in Fig. 7.4.1. The beam can be supported in various ways, for example by roller supports or pin supports (see section 2.3.3). The cross section of this beam happens to be rectangular but it can be any of many possible shapes. It will assumed that the beam has a longitudinal plane of symmetry, with the cross section symmetric about this plane, as shown in Fig.