Lectures Notes on Mechanics of Solids
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

10-1 CHAPTER 10 DEFORMATION 10.1 Stress-Strain Diagrams And
EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy CHAPTER 10 DEFORMATION 10.1 Stress-Strain Diagrams and Material Behavior 10.2 Material Characteristics 10.3 Elastic-Plastic Response of Metals 10.4 True stress and strain measures 10.5 Yielding of a Ductile Metal under a General Stress State - Mises Yield Condition. 10.6 Maximum shear stress condition 10.7 Creep Consider the bar in figure 1 subjected to a simple tension loading F. Figure 1: Bar in Tension Engineering Stress () is the quotient of load (F) and area (A). The units of stress are normally pounds per square inch (psi). = F A where: is the stress (psi) F is the force that is loading the object (lb) A is the cross sectional area of the object (in2) When stress is applied to a material, the material will deform. Elongation is defined as the difference between loaded and unloaded length ∆푙 = L - Lo where: ∆푙 is the elongation (ft) L is the loaded length of the cable (ft) Lo is the unloaded (original) length of the cable (ft) 10-1 EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy Strain is the concept used to compare the elongation of a material to its original, undeformed length. Strain () is the quotient of elongation (e) and original length (L0). Engineering Strain has no units but is often given the units of in/in or ft/ft. ∆푙 휀 = 퐿 where: is the strain in the cable (ft/ft) ∆푙 is the elongation (ft) Lo is the unloaded (original) length of the cable (ft) Example Find the strain in a 75 foot cable experiencing an elongation of one inch. -

Glossary: Definitions
Appendix B Glossary: Definitions The definitions given here apply to the terminology used throughout this book. Some of the terms may be defined differently by other authors; when this is the case, alternative terminology is noted. When two or more terms with identical or similar meaning are in general acceptance, they are given in the order of preference of the current writers. Allowable stress (working stress): If a member is so designed that the maximum stress as calculated for the expected conditions of service is less than some limiting value, the member will have a proper margin of security against damage or failure. This limiting value is the allowable stress subject to the material and condition of service in question. The allowable stress is made less than the damaging stress because of uncertainty as to the conditions of service, nonuniformity of material, and inaccuracy of the stress analysis (see Ref. 1). The margin between the allowable stress and the damaging stress may be reduced in proportion to the certainty with which the conditions of the service are known, the intrinsic reliability of the material, the accuracy with which the stress produced by the loading can be calculated, and the degree to which failure is unattended by danger or loss. (Compare with Damaging stress; Factor of safety; Factor of utilization; Margin of safety. See Refs. l–3.) Apparent elastic limit (useful limit point): The stress at which the rate of change of strain with respect to stress is 50% greater than at zero stress. It is more definitely determinable from the stress–strain diagram than is the proportional limit, and is useful for comparing materials of the same general class. -

Atwood's Machine? (5 Points)
rev 09/2019 Atwood’s Machine Equipment Qty Equipment Part Number 1 Mass and Hanger Set ME‐8979 1 Photogate with Pully ME‐6838A 1 Universal Table Clamp ME‐9376B 1 Large Rod ME‐8736 1 Small Rod ME‐8977 1 Double rod Clamp ME‐9873 1 String Background Newton’s 2nd Law (NSL) states that the acceleration a mass experiences is proportional to the net force applied to it, and inversely proportional to its inertial mass ( ). An Atwood’s Machine is a simple device consisting of a pulley, with two masses connected by a string that runs over the pulley. For an ‘ideal Atwood’s Machine’ we assume the pulley is massless, and frictionless, that the string is unstretchable, therefore a constant length, and also massless. Consider the following diagram of an ideal Atwood’s machine. One of the standard ways to apply NSL is to draw Free Body Diagrams for the masses in the system, then write Force Summation Equations for each Free Body Diagram. We will use the standard practice of labeling masses from smallest to largest, therefore m2 > m1. For an Atwood’s Machine there are only forces acting on the masses in the vertical direction so we will only need to write Force Summation Equations for the y‐direction. We obtain the following Free Body Diagrams for the two masses. Each of the masses have two forces acting on it. Each has its own weight (m1g, or m2g) pointing downwards, and each has the tension (T) in the string pointing upwards. By the assumption of an ideal string the tension is the same throughout the string. -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Lecture 1: Introduction
Lecture 1: Introduction E. J. Hinch Non-Newtonian fluids occur commonly in our world. These fluids, such as toothpaste, saliva, oils, mud and lava, exhibit a number of behaviors that are different from Newtonian fluids and have a number of additional material properties. In general, these differences arise because the fluid has a microstructure that influences the flow. In section 2, we will present a collection of some of the interesting phenomena arising from flow nonlinearities, the inhibition of stretching, elastic effects and normal stresses. In section 3 we will discuss a variety of devices for measuring material properties, a process known as rheometry. 1 Fluid Mechanical Preliminaries The equations of motion for an incompressible fluid of unit density are (for details and derivation see any text on fluid mechanics, e.g. [1]) @u + (u · r) u = r · S + F (1) @t r · u = 0 (2) where u is the velocity, S is the total stress tensor and F are the body forces. It is customary to divide the total stress into an isotropic part and a deviatoric part as in S = −pI + σ (3) where tr σ = 0. These equations are closed only if we can relate the deviatoric stress to the velocity field (the pressure field satisfies the incompressibility condition). It is common to look for local models where the stress depends only on the local gradients of the flow: σ = σ (E) where E is the rate of strain tensor 1 E = ru + ruT ; (4) 2 the symmetric part of the the velocity gradient tensor. The trace-free requirement on σ and the physical requirement of symmetry σ = σT means that there are only 5 independent components of the deviatoric stress: 3 shear stresses (the off-diagonal elements) and 2 normal stress differences (the diagonal elements constrained to sum to 0). -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
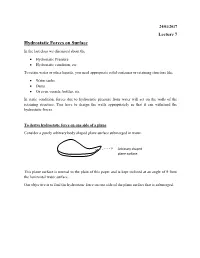
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Guide to Rheological Nomenclature: Measurements in Ceramic Particulate Systems
NfST Nisr National institute of Standards and Technology Technology Administration, U.S. Department of Commerce NIST Special Publication 946 Guide to Rheological Nomenclature: Measurements in Ceramic Particulate Systems Vincent A. Hackley and Chiara F. Ferraris rhe National Institute of Standards and Technology was established in 1988 by Congress to "assist industry in the development of technology . needed to improve product quality, to modernize manufacturing processes, to ensure product reliability . and to facilitate rapid commercialization ... of products based on new scientific discoveries." NIST, originally founded as the National Bureau of Standards in 1901, works to strengthen U.S. industry's competitiveness; advance science and engineering; and improve public health, safety, and the environment. One of the agency's basic functions is to develop, maintain, and retain custody of the national standards of measurement, and provide the means and methods for comparing standards used in science, engineering, manufacturing, commerce, industry, and education with the standards adopted or recognized by the Federal Government. As an agency of the U.S. Commerce Department's Technology Administration, NIST conducts basic and applied research in the physical sciences and engineering, and develops measurement techniques, test methods, standards, and related services. The Institute does generic and precompetitive work on new and advanced technologies. NIST's research facilities are located at Gaithersburg, MD 20899, and at Boulder, CO 80303. -

Navier-Stokes-Equation
Math 613 * Fall 2018 * Victor Matveev Derivation of the Navier-Stokes Equation 1. Relationship between force (stress), stress tensor, and strain: Consider any sub-volume inside the fluid, with variable unit normal n to the surface of this sub-volume. Definition: Force per area at each point along the surface of this sub-volume is called the stress vector T. When fluid is not in motion, T is pointing parallel to the outward normal n, and its magnitude equals pressure p: T = p n. However, if there is shear flow, the two are not parallel to each other, so we need a marix (a tensor), called the stress-tensor , to express the force direction relative to the normal direction, defined as follows: T Tn or Tnkjjk As we will see below, σ is a symmetric matrix, so we can also write Tn or Tnkkjj The difference in directions of T and n is due to the non-diagonal “deviatoric” part of the stress tensor, jk, which makes the force deviate from the normal: jkp jk jk where p is the usual (scalar) pressure From general considerations, it is clear that the only source of such “skew” / ”deviatoric” force in fluid is the shear component of the flow, described by the shear (non-diagonal) part of the “strain rate” tensor e kj: 2 1 jk2ee jk mm jk where euujk j k k j (strain rate tensro) 3 2 Note: the funny construct 2/3 guarantees that the part of proportional to has a zero trace. The two terms above represent the most general (and the only possible) mathematical expression that depends on first-order velocity derivatives and is invariant under coordinate transformations like rotations. -

Leonhard Euler Moriam Yarrow
Leonhard Euler Moriam Yarrow Euler's Life Leonhard Euler was one of the greatest mathematician and phsysicist of all time for his many contributions to mathematics. His works have inspired and are the foundation for modern mathe- matics. Euler was born in Basel, Switzerland on April 15, 1707 AD by Paul Euler and Marguerite Brucker. He is the oldest of five children. Once, Euler was born his family moved from Basel to Riehen, where most of his childhood took place. From a very young age Euler had a niche for math because his father taught him the subject. At the age of thirteen he was sent to live with his grandmother, where he attended the University of Basel to receive his Master of Philosphy in 1723. While he attended the Universirty of Basel, he studied greek in hebrew to satisfy his father. His father wanted to prepare him for a career in the field of theology in order to become a pastor, but his friend Johann Bernouilli convinced Euler's father to allow his son to pursue a career in mathematics. Bernoulli saw the potentional in Euler after giving him lessons. Euler received a position at the Academy at Saint Petersburg as a professor from his friend, Daniel Bernoulli. He rose through the ranks very quickly. Once Daniel Bernoulli decided to leave his position as the director of the mathmatical department, Euler was promoted. While in Russia, Euler was greeted/ introduced to Christian Goldbach, who sparked Euler's interest in number theory. Euler was a man of many talents because in Russia he was learning russian, executed studies on navigation and ship design, cartography, and an examiner for the military cadet corps. -

Schaum's Outlines Strength of Materials
Strength Of Materials This page intentionally left blank Strength Of Materials Fifth Edition William A. Nash, Ph.D. Former Professor of Civil Engineering University of Massachusetts Merle C. Potter, Ph.D. Professor Emeritus of Mechanical Engineering Michigan State University Schaum’s Outline Series New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto Copyright © 2011, 1998, 1994, 1972 by The McGraw-Hill Companies, Inc. All rights reserved. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. ISBN: 978-0-07-163507-3 MHID: 0-07-163507-6 The material in this eBook also appears in the print version of this title: ISBN: 978-0-07-163508-0, MHID: 0-07-163508-4. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefi t of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. To contact a representative please e-mail us at [email protected]. This publication is designed to provide accurate and authoritative information in regard to the subject matter covered. -

Strength Versus Gravity
3 Strength versus gravity The existence of any differences of height on the Earth’s surface is decisive evidence that the internal stress is not hydrostatic. If the Earth was liquid any elevation would spread out horizontally until it disap- peared. The only departure of the surface from a spherical form would be the ellipticity; the outer surface would become a level surface, the ocean would cover it to a uniform depth, and that would be the end of us. The fact that we are here implies that the stress departs appreciably from being hydrostatic; … H. Jeffreys, Earthquakes and Mountains (1935) 3.1 Topography and stress Sir Harold Jeffreys (1891–1989), one of the leading geophysicists of the early twentieth century, was fascinated (one might almost say obsessed) with the strength necessary to support the observed topographic relief on the Earth and Moon. Through several books and numerous papers he made quantitative estimates of the strength of the Earth’s interior and compared the results of those estimates to the strength of common rocks. Jeffreys was not the only earth scientist who grasped the fundamental importance of rock strength. Almost ifty years before Jeffreys, American geologist G. K. Gilbert (1843–1918) wrote in a similar vein: If the Earth possessed no rigidity, its materials would arrange themselves in accordance with the laws of hydrostatic equilibrium. The matter speciically heaviest would assume the lowest position, and there would be a graduation upward to the matter speciically lightest, which would constitute the entire surface. The surface would be regularly ellipsoidal, and would be completely covered by the ocean.