7.4 the Elementary Beam Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary: Definitions
Appendix B Glossary: Definitions The definitions given here apply to the terminology used throughout this book. Some of the terms may be defined differently by other authors; when this is the case, alternative terminology is noted. When two or more terms with identical or similar meaning are in general acceptance, they are given in the order of preference of the current writers. Allowable stress (working stress): If a member is so designed that the maximum stress as calculated for the expected conditions of service is less than some limiting value, the member will have a proper margin of security against damage or failure. This limiting value is the allowable stress subject to the material and condition of service in question. The allowable stress is made less than the damaging stress because of uncertainty as to the conditions of service, nonuniformity of material, and inaccuracy of the stress analysis (see Ref. 1). The margin between the allowable stress and the damaging stress may be reduced in proportion to the certainty with which the conditions of the service are known, the intrinsic reliability of the material, the accuracy with which the stress produced by the loading can be calculated, and the degree to which failure is unattended by danger or loss. (Compare with Damaging stress; Factor of safety; Factor of utilization; Margin of safety. See Refs. l–3.) Apparent elastic limit (useful limit point): The stress at which the rate of change of strain with respect to stress is 50% greater than at zero stress. It is more definitely determinable from the stress–strain diagram than is the proportional limit, and is useful for comparing materials of the same general class. -

Bending Stress
Bending Stress Sign convention The positive shear force and bending moments are as shown in the figure. Figure 40: Sign convention followed. Centroid of an area Scanned by CamScanner If the area can be divided into n parts then the distance Y¯ of the centroid from a point can be calculated using n ¯ Âi=1 Aiy¯i Y = n Âi=1 Ai where Ai = area of the ith part, y¯i = distance of the centroid of the ith part from that point. Second moment of area, or moment of inertia of area, or area moment of inertia, or second area moment For a rectangular section, moments of inertia of the cross-sectional area about axes x and y are 1 I = bh3 x 12 Figure 41: A rectangular section. 1 I = hb3 y 12 Scanned by CamScanner Parallel axis theorem This theorem is useful for calculating the moment of inertia about an axis parallel to either x or y. For example, we can use this theorem to calculate . Ix0 = + 2 Ix0 Ix Ad Bending stress Bending stress at any point in the cross-section is My s = − I where y is the perpendicular distance to the point from the centroidal axis and it is assumed +ve above the axis and -ve below the axis. This will result in +ve sign for bending tensile (T) stress and -ve sign for bending compressive (C) stress. Largest normal stress Largest normal stress M c M s = | |max · = | |max m I S where S = section modulus for the beam. For a rectangular section, the moment of inertia of the cross- 1 3 1 2 sectional area I = 12 bh , c = h/2, and S = I/c = 6 bh . -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Introduction to Stiffness Analysis Stiffness Analysis Procedure
Introduction to Stiffness Analysis displacements. The number of unknowns in the stiffness method of The stiffness method of analysis is analysis is known as the degree of the basis of all commercial kinematic indeterminacy, which structural analysis programs. refers to the number of node/joint Focus of this chapter will be displacements that are unknown development of stiffness equations and are needed to describe the that only take into account bending displaced shape of the structure. deformations, i.e., ignore axial One major advantage of the member, a.k.a. slope-deflection stiffness method of analysis is that method. the kinematic degrees of freedom In the stiffness method of analysis, are well-defined. we write equilibrium equations in 1 2 terms of unknown joint (node) Definitions and Terminology Stiffness Analysis Procedure Positive Sign Convention: Counterclockwise moments and The steps to be followed in rotations along with transverse forces and displacements in the performing a stiffness analysis can positive y-axis direction. be summarized as: 1. Determine the needed displace- Fixed-End Forces: Forces at the “fixed” supports of the kinema- ment unknowns at the nodes/ tically determinate structure. joints and label them d1, d2, …, d in sequence where n = the Member-End Forces: Calculated n forces at the end of each element/ number of displacement member resulting from the unknowns or degrees of applied loading and deformation freedom. of the structure. 3 4 1 2. Modify the structure such that it fixed-end forces are vectorially is kinematically determinate or added at the nodes/joints to restrained, i.e., the identified produce the equivalent fixed-end displacements in step 1 all structure forces, which are equal zero. -

Force/Deflection Relationships
Introduction to Finite Element Dynamics ⎡ x x ⎤ 1. Element Stiffness Matrices u()x = ⎢1− ⎥ u = []C u (3) ⎣ L L ⎦ 1.1 Bar Element (iii) Derive Strain - Displacement Relationship Consider a bar element shown below. At the two by using Mechanics Theory2 ends of the bar, axially aligned forces [F1, F2] are The axial strain ε(x) is given by the following applied producing deflections [u ,u ]. What is the 1 2 relationship between applied force and deflection? du d ⎡ 1 1 ⎤ ε()x = = ()[]C u = []B u = ⎢− ⎥u (4) dx dx ⎣ L L ⎦ Deformed shape u2 u1 (iv) Derive Stress - Displacement Relationship by using Elasticity Theory The axial stresses σ (x) are given by the following assuming linear elasticity and homogeneity of F1 x F2 material throughout the bar element. Where E is Element Node the material modulus of elasticity. There are typically five key stages in the σ (x)(= Eε x)= E[]B u (5) 1 analysis . (v) Use principle of Virtual Work (i) Conjecture a displacement function There is equilibrium between WI , the internal The displacement function is usually an work done in deforming the bar, and WE , approximation, that is continuous and external work done by the movement of the differentiable, most usually a polynomial. u(x) is applied forces. The bar cross sectional area the axial deflections at any point x along the bar A = ∫∫dydz is assumed constant with respect to x. element. WI = ∫∫∫σ (x).ε (x)(dxdydz = ∫σ x).ε (x)dx∫∫dydz ⎡a1 ⎤ (6) u()x = a1 + a2 x = []1 x ⎢ ⎥ = [N] a (1) = A∫σ ()x .ε ()x dx ⎣a2 ⎦ ⎡F ⎤ W = []u u 1 = uT F (7) E 1 2 ⎢F ⎥ (ii) Express u()x in terms of nodal ⎣ 2 ⎦ displacements by using boundary conditions. -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
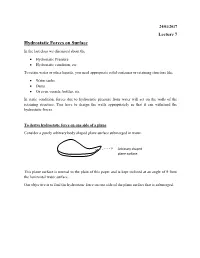
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Deflection of Beams Introduction
Deflection of Beams Introduction: In all practical engineering applications, when we use the different components, normally we have to operate them within the certain limits i.e. the constraints are placed on the performance and behavior of the components. For instance we say that the particular component is supposed to operate within this value of stress and the deflection of the component should not exceed beyond a particular value. In some problems the maximum stress however, may not be a strict or severe condition but there may be the deflection which is the more rigid condition under operation. It is obvious therefore to study the methods by which we can predict the deflection of members under lateral loads or transverse loads, since it is this form of loading which will generally produce the greatest deflection of beams. Assumption: The following assumptions are undertaken in order to derive a differential equation of elastic curve for the loaded beam 1. Stress is proportional to strain i.e. hooks law applies. Thus, the equation is valid only for beams that are not stressed beyond the elastic limit. 2. The curvature is always small. 3. Any deflection resulting from the shear deformation of the material or shear stresses is neglected. It can be shown that the deflections due to shear deformations are usually small and hence can be ignored. Consider a beam AB which is initially straight and horizontal when unloaded. If under the action of loads the beam deflect to a position A'B' under load or infact we say that the axis of the beam bends to a shape A'B'. -
Mechanics of Materials Chapter 6 Deflection of Beams
Mechanics of Materials Chapter 6 Deflection of Beams 6.1 Introduction Because the design of beams is frequently governed by rigidity rather than strength. For example, building codes specify limits on deflections as well as stresses. Excessive deflection of a beam not only is visually disturbing but also may cause damage to other parts of the building. For this reason, building codes limit the maximum deflection of a beam to about 1/360 th of its spans. A number of analytical methods are available for determining the deflections of beams. Their common basis is the differential equation that relates the deflection to the bending moment. The solution of this equation is complicated because the bending moment is usually a discontinuous function, so that the equations must be integrated in a piecewise fashion. Consider two such methods in this text: Method of double integration The primary advantage of the double- integration method is that it produces the equation for the deflection everywhere along the beams. Moment-area method The moment- area method is a semigraphical procedure that utilizes the properties of the area under the bending moment diagram. It is the quickest way to compute the deflection at a specific location if the bending moment diagram has a simple shape. The method of superposition, in which the applied loading is represented as a series of simple loads for which deflection formulas are available. Then the desired deflection is computed by adding the contributions of the component loads (principle of superposition). 6.2 Double- Integration Method Figure 6.1 (a) illustrates the bending deformation of a beam, the displacements and slopes are very small if the stresses are below the elastic limit. -

Ch. 8 Deflections Due to Bending
446.201A (Solid Mechanics) Professor Youn, Byeng Dong CH. 8 DEFLECTIONS DUE TO BENDING Ch. 8 Deflections due to bending 1 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong 8.1 Introduction i) We consider the deflections of slender members which transmit bending moments. ii) We shall treat statically indeterminate beams which require simultaneous consideration of all three of the steps (2.1) iii) We study mechanisms of plastic collapse for statically indeterminate beams. iv) The calculation of the deflections is very important way to analyze statically indeterminate beams and confirm whether the deflections exceed the maximum allowance or not. 8.2 The Moment – Curvature Relation ▶ From Ch.7 à When a symmetrical, linearly elastic beam element is subjected to pure bending, as shown in Fig. 8.1, the curvature of the neutral axis is related to the applied bending moment by the equation. ∆ = = = = (8.1) ∆→ ∆ For simplification, → ▶ Simplification i) When is not a constant, the effect on the overall deflection by the shear force can be ignored. ii) Assume that although M is not a constant the expressions defined from pure bending can be applied. Ch. 8 Deflections due to bending 2 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong ▶ Differential equations between the curvature and the deflection 1▷ The case of the large deflection The slope of the neutral axis in Fig. 8.2 (a) is = Next, differentiation with respect to arc length s gives = ( ) ∴ = → = (a) From Fig. 8.2 (b) () = () + () → = 1 + Ch. 8 Deflections due to bending 3 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong → = (b) (/) & = = (c) [(/)]/ If substitutng (b) and (c) into the (a), / = = = (8.2) [(/)]/ [()]/ ∴ = = [()]/ When the slope angle shown in Fig. -

Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics
Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics Vlado A. Lubarda Montenegrin Academy of Sciences and Arts Division of Natural Sciencies OPN, CANU 2012 Contents Preface xi Part 1. LINEAR ELASTICITY 1 Chapter 1. Anisotropic Nonuniform Lam´eProblem 2 1.1. Elastic Anisotropy 2 1.2. Radial Nonuniformity 3 1.3. Governing Differential Equations 4 1.4. Stress and Displacement Expressions 5 1.5. Traction Boundary Conditions 6 1.6. Applied External Pressure 7 1.7. Plane Stress Approximation 8 1.8. Generalized Plane Stress 10 References 11 Chapter 2. Stretching of a Hollow Circular Membrane 12 2.1. Introduction 12 2.2. Basic Equations 12 2.3. Traction Boundary Conditions 13 2.4. Mixed Boundary Conditions 16 References 18 Chapter 3. Energy of Circular Inclusion with Sliding Interface 21 3.1. Energy Expressions for Sliding Inclusion 21 3.2. Energies due to Eigenstrain 22 3.3. Energies due to Remote Loading 23 3.4. Inhomogeneity under Remote Loading 25 References 26 Chapter 4. Eigenstrain Problem for Nonellipsoidal Inclusions 27 4.1. Eshelby Property 27 4.2. Displacement Expression 27 4.3. The Shape of an Inclusion 28 4.4. Other Shapes of Inclusions 30 References 32 Chapter 5. Circular Loads on the Surface of a Half-Space 33 5.1. Displacements due to Vertical Ring Load 33 5.2. Alternative Displacement Expressions 34 iii iv CONTENTS 5.3. Tangential Line Load 37 5.4. Alternative Expressions 39 5.5. Reciprocal Properties 43 References 45 Chapter 6. Elasticity Tensors of Anisotropic Materials 46 6.1. Elastic Moduli of Transversely Isotropic Materials 46 6.2. -

Chapter 6: Bending
Chapter 6: Bending Chapter Objectives Determine the internal moment at a section of a beam Determine the stress in a beam member caused by bending Determine the stresses in composite beams Bending analysis This wood ruler is held flat against the table at the left, and fingers are poised to press against it. When the fingers apply forces, the ruler deflects, primarily up or down. Whenever a part deforms in this way, we say that it acts like a “beam.” In this chapter, we learn to determine the stresses produced by the forces and how they depend on the beam cross-section, length, and material properties. Support types: Load types: Concentrated loads Distributed loads Concentrated moments Sign conventions: How do we define whether the internal shear force and bending moment are positive or negative? Shear and moment diagrams Given: Find: = 2 kN , , Shear- = 1 m Bending moment diagram along the beam axis Example: cantilever beam Given: Find: = 4 kN , , Shear- = 1.5 kN/m Bending moment = 1 m diagram along the beam axis 2 Relations Among Load, Shear and Bending Moments Relationship between load and shear: Relationship between shear and bending moment: Wherever there is an external concentrated force, or a concentrated moment, there will be a change (jump) in shear or moment respectively. Concentrated force F acting upwards: Concentrated Moment acting clockwise Shear and moment diagrams Given: Use the graphical = 2 kN method the sketch = 1 m diagrams for V(x) and M(x) Example: cantilever beam Given: Use the graphical = 4 kN method the sketch = 1.5 kN/m diagrams for V(x) and = 1 m M(x) 2 Pure bending Take a flexible strip, such as a thin ruler, and apply equal forces with your fingers as shown.