Motion Along a Curve
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Brief Information on the Surfaces Not Included in the Basic Content of the Encyclopedia
Brief Information on the Surfaces Not Included in the Basic Content of the Encyclopedia Brief information on some classes of the surfaces which cylinders, cones and ortoid ruled surfaces with a constant were not picked out into the special section in the encyclo- distribution parameter possess this property. Other properties pedia is presented at the part “Surfaces”, where rather known of these surfaces are considered as well. groups of the surfaces are given. It is known, that the Plücker conoid carries two-para- At this section, the less known surfaces are noted. For metrical family of ellipses. The straight lines, perpendicular some reason or other, the authors could not look through to the planes of these ellipses and passing through their some primary sources and that is why these surfaces were centers, form the right congruence which is an algebraic not included in the basic contents of the encyclopedia. In the congruence of the4th order of the 2nd class. This congru- basis contents of the book, the authors did not include the ence attracted attention of D. Palman [8] who studied its surfaces that are very interesting with mathematical point of properties. Taking into account, that on the Plücker conoid, view but having pure cognitive interest and imagined with ∞2 of conic cross-sections are disposed, O. Bottema [9] difficultly in real engineering and architectural structures. examined the congruence of the normals to the planes of Non-orientable surfaces may be represented as kinematics these conic cross-sections passed through their centers and surfaces with ruled or curvilinear generatrixes and may be prescribed a number of the properties of a congruence of given on a picture. -

Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-Space E3
Fundamentals of Contemporary Mathematical Sciences (2020) 1(2) 63 { 70 Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-space E3 Abdullah Yıldırım 1,∗ Feryat Kaya 2 1 Harran University, Faculty of Arts and Sciences, Department of Mathematics S¸anlıurfa, T¨urkiye 2 S¸ehit Abdulkadir O˘guzAnatolian Imam Hatip High School S¸anlıurfa, T¨urkiye, [email protected] Received: 29 February 2020 Accepted: 29 June 2020 Abstract: In this study, evolute-involute curves are researched. Characterization of evolute-involute curves lying on the surface are examined according to Darboux frame and some curves are obtained. Keywords: Curve, surface, geodesic, curvature, frame. 1. Introduction The interest of special curves has increased recently. Some of these are associated curves. They are curves where one of the Frenet vectors at opposite points is linearly dependent to the other curve. One of the best examples of these curves is the evolute-involute partner curves. An involute thought known to have been used in his optical work came up in 1658 by C. Huygens. C. Huygens discovered involute curves while trying to make more accurate measurement studies [5]. Many researches have been conducted about evolute-involute partner curves. Some of them conducted recently are Bilici and C¸alı¸skan [4], Ozyılmaz¨ and Yılmaz [9], As and Sarıo˘glugil[2]. Bekta¸sand Y¨uceconsider the notion of the involute-evolute curves lying on the surfaces for a special situation. They determine the special involute-evolute partner D−curves in E3: By using the Darboux frame of the curves they obtain the necessary and sufficient conditions between κg , ∗ − ∗ ∗ τg; κn and κn for a curve to be the special involute partner D curve. -

Computer-Aided Design and Kinematic Simulation of Huygens's
applied sciences Article Computer-Aided Design and Kinematic Simulation of Huygens’s Pendulum Clock Gloria Del Río-Cidoncha 1, José Ignacio Rojas-Sola 2,* and Francisco Javier González-Cabanes 3 1 Department of Engineering Graphics, University of Seville, 41092 Seville, Spain; [email protected] 2 Department of Engineering Graphics, Design, and Projects, University of Jaen, 23071 Jaen, Spain 3 University of Seville, 41092 Seville, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-953-212452 Received: 25 November 2019; Accepted: 9 January 2020; Published: 10 January 2020 Abstract: This article presents both the three-dimensional modelling of the isochronous pendulum clock and the simulation of its movement, as designed by the Dutch physicist, mathematician, and astronomer Christiaan Huygens, and published in 1673. This invention was chosen for this research not only due to the major technological advance that it represented as the first reliable meter of time, but also for its historical interest, since this timepiece embodied the theory of pendular movement enunciated by Huygens, which remains in force today. This 3D modelling is based on the information provided in the only plan of assembly found as an illustration in the book Horologium Oscillatorium, whereby each of its pieces has been sized and modelled, its final assembly has been carried out, and its operation has been correctly verified by means of CATIA V5 software. Likewise, the kinematic simulation of the pendulum has been carried out, following the approximation of the string by a simple chain of seven links as a composite pendulum. The results have demonstrated the exactitude of the clock. -

Around and Around ______
Andrew Glassner’s Notebook http://www.glassner.com Around and around ________________________________ Andrew verybody loves making pictures with a Spirograph. The result is a pretty, swirly design, like the pictures Glassner EThis wonderful toy was introduced in 1966 by Kenner in Figure 1. Products and is now manufactured and sold by Hasbro. I got to thinking about this toy recently, and wondered The basic idea is simplicity itself. The box contains what might happen if we used other shapes for the a collection of plastic gears of different sizes. Every pieces, rather than circles. I wrote a program that pro- gear has several holes drilled into it, each big enough duces Spirograph-like patterns using shapes built out of to accommodate a pen tip. The box also contains some Bezier curves. I’ll describe that later on, but let’s start by rings that have gear teeth on both their inner and looking at traditional Spirograph patterns. outer edges. To make a picture, you select a gear and set it snugly against one of the rings (either inside or Roulettes outside) so that the teeth are engaged. Put a pen into Spirograph produces planar curves that are known as one of the holes, and start going around and around. roulettes. A roulette is defined by Lawrence this way: “If a curve C1 rolls, without slipping, along another fixed curve C2, any fixed point P attached to C1 describes a roulette” (see the “Further Reading” sidebar for this and other references). The word trochoid is a synonym for roulette. From here on, I’ll refer to C1 as the wheel and C2 as 1 Several the frame, even when the shapes Spirograph- aren’t circular. -
Variation Analysis of Involute Spline Tooth Contact
Brigham Young University BYU ScholarsArchive Theses and Dissertations 2006-02-22 Variation Analysis of Involute Spline Tooth Contact Brian J. De Caires Brigham Young University - Provo Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Mechanical Engineering Commons BYU ScholarsArchive Citation De Caires, Brian J., "Variation Analysis of Involute Spline Tooth Contact" (2006). Theses and Dissertations. 375. https://scholarsarchive.byu.edu/etd/375 This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. VARIATION ANALYSIS OF INVOLUTE SPLINE TOOTH CONTACT By Brian J. K. DeCaires A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of Science Department of Mechanical Engineering Brigham Young University April 2006 Copyright © 2006 Brian J. K. DeCaires All Rights Reserved BRIGHAM YOUNG UNIVERSITY GRADUATE COMMITTEE APPROVAL of a thesis submitted by Brian J. K. DeCaires This thesis has been read by each member of the following graduate committee and by majority vote has been found to be satisfactory. ___________________________ ______________________________________ Date Kenneth W. Chase, Chair ___________________________ ______________________________________ Date Carl D. Sorensen ___________________________ -

Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2D
AC 2008-1325: INTERACTIVE INVOLUTE GEAR ANALYSIS AND TOOTH PROFILE GENERATION USING WORKING MODEL 2D Petru-Aurelian Simionescu, University of Alabama at Birmingham Petru-Aurelian Simionescu is currently an Assistant Professor of Mechanical Engineering at The University of Alabama at Birmingham. His teaching and research interests are in the areas of Dynamics, Vibrations, Optimal design of mechanical systems, Mechanisms and Robotics, CAD and Computer Graphics. Page 13.781.1 Page © American Society for Engineering Education, 2008 Interactive Involute Gear Analysis and Tooth Profile Generation using Working Model 2D Abstract Working Model 2D (WM 2D) is a powerful, easy to use planar multibody software that has been adopted by many instructors teaching Statics, Dynamics, Mechanisms, Machine Design, as well as by practicing engineers. Its programming and import-export capabilities facilitate simulating the motion of complex shape bodies subject to constraints. In this paper a number of WM 2D applications will be described that allow students to understand the basics properties of involute- gears and how they are manufactured. Other applications allow students to study the kinematics of planetary gears trains, which is known to be less intuitive than that of fix-axle transmissions. Introduction There are numerous reports on the use of Working Model 2D in teaching Mechanical Engineering disciplines, including Statics, Dynamics, Mechanisms, Vibrations, Controls and Machine Design1-9. Working Model 2D (WM 2D), currently available form Design Simulation Technologies10, is a planar multibody software, capable of performing kinematic and dynamic simulation of interconnected bodies subject to a variety of constraints. The versatility of the software is given by its geometry and data import/export capabilities, and scripting through formula and WM Basic language system. -

The Cycloid Scott Morrison
The cycloid Scott Morrison “The time has come”, the old man said, “to talk of many things: Of tangents, cusps and evolutes, of curves and rolling rings, and why the cycloid’s tautochrone, and pendulums on strings.” October 1997 1 Everyone is well aware of the fact that pendulums are used to keep time in old clocks, and most would be aware that this is because even as the pendu- lum loses energy, and winds down, it still keeps time fairly well. It should be clear from the outset that a pendulum is basically an object moving back and forth tracing out a circle; hence, we can ignore the string or shaft, or whatever, that supports the bob, and only consider the circular motion of the bob, driven by gravity. It’s important to notice now that the angle the tangent to the circle makes with the horizontal is the same as the angle the line from the bob to the centre makes with the vertical. The force on the bob at any moment is propor- tional to the sine of the angle at which the bob is currently moving. The net force is also directed perpendicular to the string, that is, in the instantaneous direction of motion. Because this force only changes the angle of the bob, and not the radius of the movement (a pendulum bob is always the same distance from its fixed point), we can write: θθ&& ∝sin Now, if θ is always small, which means the pendulum isn’t moving much, then sinθθ≈. This is very useful, as it lets us claim: θθ&& ∝ which tells us we have simple harmonic motion going on. -

Unity Via Diversity 81
Unity via diversity 81 Unity via diversity Unity via diversity is a concept whose main idea is that every entity could be examined by different point of views. Many sources name this conception as interdisciplinarity . The mystery of interdisciplinarity is revealed when people realize that there is only one discipline! The division into multiple disciplines (or subjects) is just the human way to divide-and-understand Nature. Demonstrations of how informatics links real life and mathematics can be found everywhere. Let’s start with the bicycle – a well-know object liked by most students. Bicycles have light reflectors for safety reasons. Some of the reflectors are attached sideway on the wheels. Wheel reflector Reflectors notify approaching vehicles that there is a bicycle moving along or across the road. Even if the conditions prevent the driver from seeing the bicycle, the reflector is a sufficient indicator if the bicycle is moving or not, is close or far, is along the way or across it. Curve of the reflector of a rolling wheel When lit during the night, the wheel’s side reflectors create a beautiful luminous curve – a trochoid . 82 Appendix to Chapter 5 A trochoid curve is the locus of a fixed point as a circle rolls without slipping along a straight line. Depending on the position of the point a trochoid could be further classified as curtate cycloid (the point is internal to the circle), cycloid (the point is on the circle), and prolate cycloid (the point is outside the circle). Cycloid, curtate cycloid and prolate cycloid An interesting activity during the study of trochoids is to draw them using software tools. -

A Tale of the Cycloid in Four Acts
A Tale of the Cycloid In Four Acts Carlo Margio Figure 1: A point on a wheel tracing a cycloid, from a work by Pascal in 16589. Introduction In the words of Mersenne, a cycloid is “the curve traced in space by a point on a carriage wheel as it revolves, moving forward on the street surface.” 1 This deceptively simple curve has a large number of remarkable and unique properties from an integral ratio of its length to the radius of the generating circle, and an integral ratio of its enclosed area to the area of the generating circle, as can be proven using geometry or basic calculus, to the advanced and unique tautochrone and brachistochrone properties, that are best shown using the calculus of variations. Thrown in to this assortment, a cycloid is the only curve that is its own involute. Study of the cycloid can reinforce the curriculum concepts of curve parameterisation, length of a curve, and the area under a parametric curve. Being mechanically generated, the cycloid also lends itself to practical demonstrations that help visualise these abstract concepts. The history of the curve is as enthralling as the mathematics, and involves many of the great European mathematicians of the seventeenth century (See Appendix I “Mathematicians and Timeline”). Introducing the cycloid through the persons involved in its discovery, and the struggles they underwent to get credit for their insights, not only gives sequence and order to the cycloid’s properties and shows which properties required advances in mathematics, but it also gives a human face to the mathematicians involved and makes them seem less remote, despite their, at times, seemingly superhuman discoveries. -
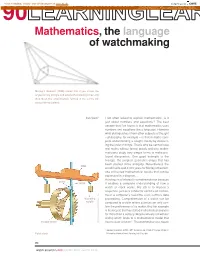
Mathematics, the Language of Watchmaking
View metadata, citation and similar papers at core.ac.uk brought to you by CORE 90LEARNINGprovidedL by Infoscience E- École polytechniqueA fédérale de LausanneRNINGLEARNINGLEARNING Mathematics, the language of watchmaking Morley’s theorem (1898) states that if you trisect the angles of any triangle and extend the trisecting lines until they meet, the small triangle formed in the centre will always be equilateral. Ilan Vardi 1 I am often asked to explain mathematics; is it just about numbers and equations? The best answer that I’ve found is that mathematics uses numbers and equations like a language. However what distinguishes it from other subjects of thought – philosophy, for example – is that in maths com- plete understanding is sought, mostly by discover- ing the order in things. That is why we cannot have real maths without formal proofs and why mathe- maticians study very simple forms to make pro- found discoveries. One good example is the triangle, the simplest geometric shape that has been studied since antiquity. Nevertheless the foliot world had to wait 2,000 years for Morley’s theorem, one of the few mathematical results that can be expressed in a diagram. Horology is of interest to a mathematician because pallet verge it enables a complete understanding of how a watch or clock works. His job is to impose a sequence, just as a conductor controls an orches- tra or a computer’s real-time clock controls data regulating processing. Comprehension of a watch can be weight compared to a violin where science can only con- firm the preferences of its maker. -

Parametric Equations and Polar Coordinates
10 PARAMETRIC EQUATIONS AND POLAR COORDINATES Parametric equations and polar coordinates enable us to describe a great variety of new curves—some practical, some beautiful, some fanciful, some strange. So far we have described plane curves by giving y as a function of x ͓y f ͑x͔͒ or x as a function of y ͓x t͑y͔͒ or by giving a relation between x and y that defines y implicitly as a function of x ͓ f ͑x, y͒ 0͔. In this chapter we discuss two new methods for describing curves. Some curves, such as the cycloid, are best handled when both x and y are given in terms of a third variable t called a parameter ͓x f ͑t͒, y t͑t͔͒ . Other curves, such as the cardioid, have their most convenient description when we use a new coordinate system, called the polar coordinate system. 620 10.1 CURVES DEFINED BY PARAMETRIC EQUATIONS y Imagine that a particle moves along the curve C shown in Figure 1. It is impossible to C describe C by an equation of the form y f ͑x͒ because C fails the Vertical Line Test. But (x, y)={f(t), g(t)} the x- and y-coordinates of the particle are functions of time and so we can write x f ͑t͒ and y t͑t͒. Such a pair of equations is often a convenient way of describing a curve and gives rise to the following definition. Suppose that x and y are both given as functions of a third variable t (called a param- 0 x eter ) by the equations x f ͑t͒ y t͑t͒ FIGURE 1 (called parametric equations ). -
The Nephroid
1/13 The Nephroid Breanne Perry and Brian Meyer Introduction:Definitions Cycloid:The locus of a point on the outside of a circle with a set radius (r) rolling along a straight line. 2/13 Epicycloid:An epicycloid is a cycloid rolling along the outside of a circle instead of along a straight line. The description of an epicycloid depends on the radius of the circle being traversed (b) and the radius of the rolling circle (a). Nephroid:A bicuspid epicycloid. Nephroid Literally means ”kidney shaped”. The nephroid arises when the radius of the center circle is twice that of the rolling circle (b=a/2). Catacaustic:The curve formed by reflecting light off of another curve. Catacaustic of the Cardiod 3/13 History of the Nephroid The Nephroid was first studied by Christiaan Huygens and Tshirn- hausen in 1678, they found it to be the catacaustic of a circle when the 4/13 light source is at infinity. George Airy proved this to be true through the wave theory of light in 1838. In 1878 Richard Proctor coined the term nephroid in his book The Geometry of cycloids. The term Nephroid replaced the existing two-cusped epicycloid. Some members of the epicycloid family 5/13 line 2 b=a Cardioid line 3 b=a/2 Nephroid line 4 b=a/3 three cusped epicycloid Deriving the formula for the Nephroid First to determine the relationship between the change in angle from the large circle to the small circle, we analyze the the relationship be- 6/13 tween point D and E as they traverse the outside of their respected circles.