Predicting Internet Network Distance with Coordinates-Based Approaches
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Getting to Grips with Unix and the Linux Family
Getting to grips with Unix and the Linux family David Chiappini, Giulio Pasqualetti, Tommaso Redaelli Torino, International Conference of Physics Students August 10, 2017 According to the booklet At this end of this session, you can expect: • To have an overview of the history of computer science • To understand the general functioning and similarities of Unix-like systems • To be able to distinguish the features of different Linux distributions • To be able to use basic Linux commands • To know how to build your own operating system • To hack the NSA • To produce the worst software bug EVER According to the booklet update At this end of this session, you can expect: • To have an overview of the history of computer science • To understand the general functioning and similarities of Unix-like systems • To be able to distinguish the features of different Linux distributions • To be able to use basic Linux commands • To know how to build your own operating system • To hack the NSA • To produce the worst software bug EVER A first data analysis with the shell, sed & awk an interactive workshop 1 at the beginning, there was UNIX... 2 ...then there was GNU 3 getting hands dirty common commands wait till you see piping 4 regular expressions 5 sed 6 awk 7 challenge time What's UNIX • Bell Labs was a really cool place to be in the 60s-70s • UNIX was a OS developed by Bell labs • they used C, which was also developed there • UNIX became the de facto standard on how to make an OS UNIX Philosophy • Write programs that do one thing and do it well. -
Introduction to Unix
Introduction to Unix Rob Funk <[email protected]> University Technology Services Workstation Support http://wks.uts.ohio-state.edu/ University Technology Services Course Objectives • basic background in Unix structure • knowledge of getting started • directory navigation and control • file maintenance and display commands • shells • Unix features • text processing University Technology Services Course Objectives Useful commands • working with files • system resources • printing • vi editor University Technology Services In the Introduction to UNIX document 3 • shell programming • Unix command summary tables • short Unix bibliography (also see web site) We will not, however, be covering these topics in the lecture. Numbers on slides indicate page number in book. University Technology Services History of Unix 7–8 1960s multics project (MIT, GE, AT&T) 1970s AT&T Bell Labs 1970s/80s UC Berkeley 1980s DOS imitated many Unix ideas Commercial Unix fragmentation GNU Project 1990s Linux now Unix is widespread and available from many sources, both free and commercial University Technology Services Unix Systems 7–8 SunOS/Solaris Sun Microsystems Digital Unix (Tru64) Digital/Compaq HP-UX Hewlett Packard Irix SGI UNICOS Cray NetBSD, FreeBSD UC Berkeley / the Net Linux Linus Torvalds / the Net University Technology Services Unix Philosophy • Multiuser / Multitasking • Toolbox approach • Flexibility / Freedom • Conciseness • Everything is a file • File system has places, processes have life • Designed by programmers for programmers University Technology Services -
Linking + Libraries
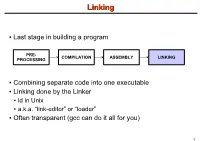
LinkingLinking ● Last stage in building a program PRE- COMPILATION ASSEMBLY LINKING PROCESSING ● Combining separate code into one executable ● Linking done by the Linker ● ld in Unix ● a.k.a. “link-editor” or “loader” ● Often transparent (gcc can do it all for you) 1 LinkingLinking involves...involves... ● Combining several object modules (the .o files corresponding to .c files) into one file ● Resolving external references to variables and functions ● Producing an executable file (if no errors) file1.c file1.o file2.c gcc file2.o Linker Executable fileN.c fileN.o Header files External references 2 LinkingLinking withwith ExternalExternal ReferencesReferences file1.c file2.c int count; #include <stdio.h> void display(void); Compiler extern int count; int main(void) void display(void) { file1.o file2.o { count = 10; with placeholders printf(“%d”,count); display(); } return 0; Linker } ● file1.o has placeholder for display() ● file2.o has placeholder for count ● object modules are relocatable ● addresses are relative offsets from top of file 3 LibrariesLibraries ● Definition: ● a file containing functions that can be referenced externally by a C program ● Purpose: ● easy access to functions used repeatedly ● promote code modularity and re-use ● reduce source and executable file size 4 LibrariesLibraries ● Static (Archive) ● libname.a on Unix; name.lib on DOS/Windows ● Only modules with referenced code linked when compiling ● unlike .o files ● Linker copies function from library into executable file ● Update to library requires recompiling program 5 LibrariesLibraries ● Dynamic (Shared Object or Dynamic Link Library) ● libname.so on Unix; name.dll on DOS/Windows ● Referenced code not copied into executable ● Loaded in memory at run time ● Smaller executable size ● Can update library without recompiling program ● Drawback: slightly slower program startup 6 LibrariesLibraries ● Linking a static library libpepsi.a /* crave source file */ … gcc .. -

AR400 User Guide 2.7.1
AR400 SERIES User Guide Software Release 2.7.1 AR410 AR440S AR441S AR450S AR400 Series Router User Guide for Software Release 2.7.1 Document Number C613-02021-00 REV F. Copyright © 2004 Allied Telesyn International Corp. 19800 North Creek Parkway, Suite 200, Bothell, WA 98011, USA. All rights reserved. No part of this publication may be reproduced without prior written permission from Allied Telesyn. Allied Telesyn International Corp. reserves the right to make changes in specifications and other information contained in this document without prior written notice. The information provided herein is subject to change without notice. In no event shall Allied Telesyn be liable for any incidental, special, indirect, or consequential damages whatsoever, including but not limited to lost profits, arising out of or related to this manual or the information contained herein, even if Allied Telesyn has been advised of, known, or should have known, the possibility of such damages. All trademarks are the property of their respective owner. Contents CHAPTER 1 Introduction Why Read this User Guide? ............................................................................... 7 Where To Find More Information ...................................................................... 8 The Documentation Set .............................................................................. 8 Technical support .............................................................................................. 9 Features of the Router ..................................................................................... -

The Linux Command Line
The Linux Command Line Fifth Internet Edition William Shotts A LinuxCommand.org Book Copyright ©2008-2019, William E. Shotts, Jr. This work is licensed under the Creative Commons Attribution-Noncommercial-No De- rivative Works 3.0 United States License. To view a copy of this license, visit the link above or send a letter to Creative Commons, PO Box 1866, Mountain View, CA 94042. A version of this book is also available in printed form, published by No Starch Press. Copies may be purchased wherever fine books are sold. No Starch Press also offers elec- tronic formats for popular e-readers. They can be reached at: https://www.nostarch.com. Linux® is the registered trademark of Linus Torvalds. All other trademarks belong to their respective owners. This book is part of the LinuxCommand.org project, a site for Linux education and advo- cacy devoted to helping users of legacy operating systems migrate into the future. You may contact the LinuxCommand.org project at http://linuxcommand.org. Release History Version Date Description 19.01A January 28, 2019 Fifth Internet Edition (Corrected TOC) 19.01 January 17, 2019 Fifth Internet Edition. 17.10 October 19, 2017 Fourth Internet Edition. 16.07 July 28, 2016 Third Internet Edition. 13.07 July 6, 2013 Second Internet Edition. 09.12 December 14, 2009 First Internet Edition. Table of Contents Introduction....................................................................................................xvi Why Use the Command Line?......................................................................................xvi -

BASIC UNIX COMMANDS FILES and DIRECTORIES All Information Is Stored in files
BASIC UNIX COMMANDS FILES AND DIRECTORIES All information is stored in files. File names and COMMANDS commands are case sensitive. Case matters. Files Commands are what you type at the prompt. Com- are contained in directories. You start out in your mands have arguments on which they operate. For own home directory, and your prompt usually tells example, in rm temp, the command is rm and the ar- its name. At any given time, one of these directories gument is temp; this command removes the file called is your working directory, the one you are in. temp. Here I put arguments in UPPER CASE. Thus, You can refer to files in your working directory by words such as FILE are taken to stand for some other just their names. You can refer to a file that is in a word, such as temp. In the following list, I use [ ] for subdirectory by giving a subdirectory name, a slash, optional arguments that are not typicaly used. and the file name, e.g., Mail/baron. You can refer to Commands have options that are controlled with any file on the computer by giving its full name, start- switches, which are usually letters following a single ing with a slash, such as /home7/b/baron/mbox. dash. Usually you can write several letters after one dash. For example ls -l lists files in a long format, If the file is a program, typing its name will run it. with more information. ls -a lists all the files, in- (That is what commands do.) If the program is some- cluding those that begin with ., which are usually thing you have just written and is in the director you files used by various programs. -
Zypper Cheat Sheet Or Type M an Zypper on a Terminal
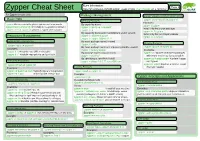
More Information: Page 1 Zypper Cheat Sheet https://en.opensuse.org/SDB:Zypper_usage or type m an zypper on a terminal For Zypper version 1.0.9 Package Management Source Packages and Build Dependencies Basic Help Selecting Packages zypper source-install or zypper si Examples: zypper #list the available global options and commands By capability name: zypper si zypper zypper help [command] #Print help for a specific command zypper in 'perl(Log::Log4perl)' Install only the source package zypper shell or zypper sh #Open a zypper shell session zypper in qt zypper in -D zypper By capability name and/or architecture and/or version Install only the build dependencies zypper in 'zypper<0.12.10' Repository Management zypper in -d zypper zypper in zypper.i586=0.12.11 Listing Defined Repositories By exact package name (--name) Updating Packages zypper in -n ftp zypper repos or zypper lr By exact package name and repository (implies --name) zypper update or zypper up Examples: zypper in factory:zypper Examples: zypper lr -u #include repo URI on the table By package name using wildcards zypper up #update all installed packages zypper lr -P #include repo priority and sort by it zypper in yast*ftp* with newer version as far as possible By specifying a .rpm file to install zypper up libzypp zypper #update libzypp Refreshing Repositories zypper in skype-2.0.0.72-suse.i586.rpm and zypper zypper refresh or zypper ref zypper in sqlite3 #update sqlite3 or install Installing Packages Examples: if not yet installed zypper ref packman main #specify repos to be -
APPENDIX a Aegis and Unix Commands
APPENDIX A Aegis and Unix Commands FUNCTION AEGIS BSD4.2 SYSS ACCESS CONTROL AND SECURITY change file protection modes edacl chmod chmod change group edacl chgrp chgrp change owner edacl chown chown change password chpass passwd passwd print user + group ids pst, lusr groups id +names set file-creation mode mask edacl, umask umask umask show current permissions acl -all Is -I Is -I DIRECTORY CONTROL create a directory crd mkdir mkdir compare two directories cmt diff dircmp delete a directory (empty) dlt rmdir rmdir delete a directory (not empty) dlt rm -r rm -r list contents of a directory ld Is -I Is -I move up one directory wd \ cd .. cd .. or wd .. move up two directories wd \\ cd . ./ .. cd . ./ .. print working directory wd pwd pwd set to network root wd II cd II cd II set working directory wd cd cd set working directory home wd- cd cd show naming directory nd printenv echo $HOME $HOME FILE CONTROL change format of text file chpat newform compare two files emf cmp cmp concatenate a file catf cat cat copy a file cpf cp cp Using and Administering an Apollo Network 265 copy std input to std output tee tee tee + files create a (symbolic) link crl In -s In -s delete a file dlf rm rm maintain an archive a ref ar ar move a file mvf mv mv dump a file dmpf od od print checksum and block- salvol -a sum sum -count of file rename a file chn mv mv search a file for a pattern fpat grep grep search or reject lines cmsrf comm comm common to 2 sorted files translate characters tic tr tr SHELL SCRIPT TOOLS condition evaluation tools existf test test -

Bedtools Documentation Release 2.30.0
Bedtools Documentation Release 2.30.0 Quinlan lab @ Univ. of Utah Jan 23, 2021 Contents 1 Tutorial 3 2 Important notes 5 3 Interesting Usage Examples 7 4 Table of contents 9 5 Performance 169 6 Brief example 173 7 License 175 8 Acknowledgments 177 9 Mailing list 179 i ii Bedtools Documentation, Release 2.30.0 Collectively, the bedtools utilities are a swiss-army knife of tools for a wide-range of genomics analysis tasks. The most widely-used tools enable genome arithmetic: that is, set theory on the genome. For example, bedtools allows one to intersect, merge, count, complement, and shuffle genomic intervals from multiple files in widely-used genomic file formats such as BAM, BED, GFF/GTF, VCF. While each individual tool is designed to do a relatively simple task (e.g., intersect two interval files), quite sophisticated analyses can be conducted by combining multiple bedtools operations on the UNIX command line. bedtools is developed in the Quinlan laboratory at the University of Utah and benefits from fantastic contributions made by scientists worldwide. Contents 1 Bedtools Documentation, Release 2.30.0 2 Contents CHAPTER 1 Tutorial We have developed a fairly comprehensive tutorial that demonstrates both the basics, as well as some more advanced examples of how bedtools can help you in your research. Please have a look. 3 Bedtools Documentation, Release 2.30.0 4 Chapter 1. Tutorial CHAPTER 2 Important notes • As of version 2.28.0, bedtools now supports the CRAM format via the use of htslib. Specify the reference genome associated with your CRAM file via the CRAM_REFERENCE environment variable. -
07 07 Unixintropart2 Lucio Week 3
Unix Basics Command line tools Daniel Lucio Overview • Where to use it? • Command syntax • What are commands? • Where to get help? • Standard streams(stdin, stdout, stderr) • Pipelines (Power of combining commands) • Redirection • More Information Introduction to Unix Where to use it? • Login to a Unix system like ’kraken’ or any other NICS/ UT/XSEDE resource. • Download and boot from a Linux LiveCD either from a CD/DVD or USB drive. • http://www.puppylinux.com/ • http://www.knopper.net/knoppix/index-en.html • http://www.ubuntu.com/ Introduction to Unix Where to use it? • Install Cygwin: a collection of tools which provide a Linux look and feel environment for Windows. • http://cygwin.com/index.html • https://newton.utk.edu/bin/view/Main/Workshop0InstallingCygwin • Online terminal emulator • http://bellard.org/jslinux/ • http://cb.vu/ • http://simpleshell.com/ Introduction to Unix Command syntax $ command [<options>] [<file> | <argument> ...] Example: cp [-R [-H | -L | -P]] [-fi | -n] [-apvX] source_file target_file Introduction to Unix What are commands? • An executable program (date) • A command built into the shell itself (cd) • A shell program/function • An alias Introduction to Unix Bash commands (Linux) alias! crontab! false! if! mknod! ram! strace! unshar! apropos! csplit! fdformat! ifconfig! more! rcp! su! until! apt-get! cut! fdisk! ifdown! mount! read! sudo! uptime! aptitude! date! fg! ifup! mtools! readarray! sum! useradd! aspell! dc! fgrep! import! mtr! readonly! suspend! userdel! awk! dd! file! install! mv! reboot! symlink! -

Roof Rail Airbag Folding Technique in LS-Prepost ® Using Dynfold Option
14th International LS-DYNA Users Conference Session: Modeling Roof Rail Airbag Folding Technique in LS-PrePost® Using DynFold Option Vijay Chidamber Deshpande GM India – Tech Center Wenyu Lian General Motors Company, Warren Tech Center Amit Nair Livermore Software Technology Corporation Abstract A requirement to reduce vehicle development timelines is making engineers strive to limit lead times in analytical simulations. Airbags play a crucial role in the passive safety crash analysis. Hence they need to be designed, developed and folded for CAE applications within a short span of time. Therefore a method/procedure to fold the airbag efficiently is of utmost importance. In this study the RRAB (Roof Rail AirBag) folding is carried out in LS-PrePost® by DynFold option. It is purely a simulation based folding technique, which can be solved in LS-DYNA®. In this paper we discuss in detail the RRAB folding process and tools/methods to make this effective. The objective here is to fold the RRAB to include modifications in the RRAB, efficiently and realistically using common analysis tools ( LS-DYNA & LS-PrePost), without exploring a third party tool , thus reducing the turnaround time. Introduction To meet the regulatory and consumer metrics requirements, multiple design iterations are required using advanced CAE simulation models for the various safety load cases. One of the components that requires frequent changes is the roof rail airbag (RRAB). After any changes to the geometry or pattern in the airbag have been made, the airbag needs to be folded back to its design position. Airbag folding is available in a few pre-processors; however, there are some folding patterns that are difficult to be folded using the pre-processor folding modules. -
Differential Response: a Primer for Child Welfare Professionals
FACTSHEETS | OCTOBER 2020 Differential Response: A Primer for Child Welfare Professionals Recognizing that a one-size-fits-all approach WHAT'S INSIDE does not serve children and families well, many agencies have implemented differential response Overview (DR), a system reform that establishes multiple pathways to respond to child maltreatment reports. DR routes families with a screened- Approaches to implementing differential response in report of child maltreatment through a traditional investigation pathway or an alternative assessment response pathway, depending on Differential response in the field other State policies and program requirements. Rather than initiating an investigation every time a family has a screened-in report, DR practice Conclusion seeks to assess a family's needs and connect them with services that will help them keep their References children safe. By linking families with services that will strengthen their ability to safely care for their children, DR can reduce the number of children entering foster care and decrease future involvement with the child welfare system. This factsheet provides child welfare professionals with an overview of DR and considerations for practice. Children's Bureau/ACYF/ACF/HHS | 800.394.3366 | Email: [email protected] | https://www.childwelfare.gov 1 OVERVIEW Both pathways share underlying principles and goals, including a focus on child safety, DR—also called alternative response, family permanency, and well-being, and include assessment response, multiple response, child safety and/or risk assessments. The or dual track—is a way of structuring child pathway assignment for a family could change protective services (CPS) to allow for more based on new information, such as potential flexibility in how it responds to low- and criminal behavior or imminent danger of moderate-risk cases and better meet the maltreatment.