The Surface Roughness of Large Craters on Mercury
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Independent Republic Quarterly, 2000, Vol. 34, No. 1 Horry County Historical Society
Coastal Carolina University CCU Digital Commons The ndeI pendent Republic Quarterly Horry County Archives Center 2000 Independent Republic Quarterly, 2000, Vol. 34, No. 1 Horry County Historical Society Follow this and additional works at: https://digitalcommons.coastal.edu/irq Part of the Civic and Community Engagement Commons, and the History Commons Recommended Citation Horry County Historical Society, "Independent Republic Quarterly, 2000, Vol. 34, No. 1" (2000). The Independent Republic Quarterly. 131. https://digitalcommons.coastal.edu/irq/131 This Journal is brought to you for free and open access by the Horry County Archives Center at CCU Digital Commons. It has been accepted for inclusion in The ndeI pendent Republic Quarterly by an authorized administrator of CCU Digital Commons. For more information, please contact [email protected]. , The Independent Republic Quarterly II (ISSN 0046-88431) ~ A Journal devoted to encouraging the study of the history of Horry County, S.C., to - . ~reservi ng information and to publishing research, documents, and pictures related to it. J Vol. 34 Winter, 2000 No. 1 CELEBRATING THE TWENTY-SIXTH SOUTH CAROLINA REGIMENT INFANTRY Published Quarterly By The Horry County Historical Society P. 0. Box 2025 Conway,S.C.29528 Winter 2000 The Independent Republic Quarterly Page2 2000 Officers Horry County Historical Society 606 Main St. Conway, SC 29526 '" Organized 1966 Telephone# 843-488-1966 Internet address: www.hchsonline.org Sylvia Cox Reddick .......................President ·Jeanne L. Sasser ...........................Vice President Cynthia Soles .............................. Secretary John C. Thomas ...........................Treasurer Carlisle Dawsey ............................Director Bonnie Jordan Hucks ..................... Director Susan McMillan ........................... Director ex-officio: Ann Cox Long ............................. Past President Ben Burroughs ............................ Historian Ben Burroughs .............................Executive Director Christopher C. -

Chinese Literature
CHINESE LITERATURE CONTENTS KUO MO-JO—Chu Yuan: Great Patriotic Poet CHU YUAN—Li Sao CHOU YANG—^The Reform and Development of Chinese Opera TING Yl & HO CHING-CHIH—'The White-haired Girl HO CHING-CHIH—How "The White-haired Girl" Was Written and Produced WEI WEI—Get Them Down! SHIH KUO—Happy Day I «fW W-i* > 4 .'T : 1953 /c CHINESE LITERATURE CONTENTS KJJO MO-JO—Chu Yuan; Great Patriotic Poet 5 CHU YUAN—IA Sao 12 CHOU YANG—^The Reform and Development of Chinese Opera 23 TING YIi& HO CHING-CHIH—The White-haired Giv\ ... 38 HO CHING-CHIH—How "The White-haired Girl" Was Written and Produced 110 WEI WEI—Get Them Down! 115 SHIH KUO—Kslvw Day 132 Plates YU FEI-AN—The Return of Spring CHIN CHENG & TUNG PO—^Peasants Working for Industrialisation YEN HAN—I Will Defend Peace Printed in China CHINESE LITERATURE Editor: MAO TUN ADDRESS: "Chinese Literature," 1 I Nan Ho Yen, Peking Published by the Foreign Languages Press 26 Kuo Hui Chieh, Peking, China Chu Yuan: Great Patriotic Poet by Kuo Mo'jo June 15th this year (the 5th day of the 5th moon by the lunar calendar) ia the 2,2S0th anniver- eary of the death of Chu Yuan, great patriotic poet and statesman of China. Chu Yuan was a digni tary of the kingdom of Ch'u during the Warring States period, but he steadfastly opposed the cor rupt government of the king of Ch'u and stood up staunchly for his own honourable policy. His im mortal "Li Sao"—a poem so eminently of the people—is an impassioned expression of his patriot ism. -

Ames - 75 Years of World Leadership in Science and Technology on Aug
April 2014 - A Quarterly Publication Ames - 75 years of world leadership in science and technology On Aug. 4, 1939, the U.S. Senate passed a bill that included funding for a new National Advisory Committee for Aeronautics (NACA) research sta- tion, where advanced research facilities would be built to develop future flight technologies. Almost 20 years later, the NACA research laboratory became part of the National Aeronautics and Space Administration. Today, 75 years after its inception, NASA’s Ames Research Center at Moffett Field, Mountain View, Calif., continues its world leadership in science and technology. As part of our celebration to commemorate Ames and its glorious past, the Astrogram will publish a series of feature stories depicting past research projects and facilities. To all those who have been an integral part of our past and present, Happy 75th anniversary Ames! See historic Ames photos on page 6 Atmospheric science: NASA Ames’ early contribution to our home planet (part one) The prospect of war was the driv- ing force for Ames’ first research authorization, a study to protect airplanes from the hazards of icing while flying. In 1941, Ames researchers flew a Curtiss C-46 (left) as a flying de-icing research laboratory, to study atmospheric conditions. Wom- en are pictured in the photo, one in the cockpit and two standing with tools in hand. NACA photo BY RUTH DASSO MARLAIRE In 1941, Ames researchers flew a spaceflight program. He refused to Atmospheric research and air- Curtiss C-46 as a flying de-icing fund NASA at the 1960s level, but he borne science campaigns have been research laboratory to study atmo- did approve the start of NASA’s space strengths of NASA’s Ames Research spheric conditions, including liquid- shuttle program. -

March 21–25, 2016
FORTY-SEVENTH LUNAR AND PLANETARY SCIENCE CONFERENCE PROGRAM OF TECHNICAL SESSIONS MARCH 21–25, 2016 The Woodlands Waterway Marriott Hotel and Convention Center The Woodlands, Texas INSTITUTIONAL SUPPORT Universities Space Research Association Lunar and Planetary Institute National Aeronautics and Space Administration CONFERENCE CO-CHAIRS Stephen Mackwell, Lunar and Planetary Institute Eileen Stansbery, NASA Johnson Space Center PROGRAM COMMITTEE CHAIRS David Draper, NASA Johnson Space Center Walter Kiefer, Lunar and Planetary Institute PROGRAM COMMITTEE P. Doug Archer, NASA Johnson Space Center Nicolas LeCorvec, Lunar and Planetary Institute Katherine Bermingham, University of Maryland Yo Matsubara, Smithsonian Institute Janice Bishop, SETI and NASA Ames Research Center Francis McCubbin, NASA Johnson Space Center Jeremy Boyce, University of California, Los Angeles Andrew Needham, Carnegie Institution of Washington Lisa Danielson, NASA Johnson Space Center Lan-Anh Nguyen, NASA Johnson Space Center Deepak Dhingra, University of Idaho Paul Niles, NASA Johnson Space Center Stephen Elardo, Carnegie Institution of Washington Dorothy Oehler, NASA Johnson Space Center Marc Fries, NASA Johnson Space Center D. Alex Patthoff, Jet Propulsion Laboratory Cyrena Goodrich, Lunar and Planetary Institute Elizabeth Rampe, Aerodyne Industries, Jacobs JETS at John Gruener, NASA Johnson Space Center NASA Johnson Space Center Justin Hagerty, U.S. Geological Survey Carol Raymond, Jet Propulsion Laboratory Lindsay Hays, Jet Propulsion Laboratory Paul Schenk, -

Impact Melt Emplacement on Mercury
Western University Scholarship@Western Electronic Thesis and Dissertation Repository 7-24-2018 2:00 PM Impact Melt Emplacement on Mercury Jeffrey Daniels The University of Western Ontario Supervisor Neish, Catherine D. The University of Western Ontario Graduate Program in Geology A thesis submitted in partial fulfillment of the equirr ements for the degree in Master of Science © Jeffrey Daniels 2018 Follow this and additional works at: https://ir.lib.uwo.ca/etd Part of the Geology Commons, Physical Processes Commons, and the The Sun and the Solar System Commons Recommended Citation Daniels, Jeffrey, "Impact Melt Emplacement on Mercury" (2018). Electronic Thesis and Dissertation Repository. 5657. https://ir.lib.uwo.ca/etd/5657 This Dissertation/Thesis is brought to you for free and open access by Scholarship@Western. It has been accepted for inclusion in Electronic Thesis and Dissertation Repository by an authorized administrator of Scholarship@Western. For more information, please contact [email protected]. Abstract Impact cratering is an abrupt, spectacular process that occurs on any world with a solid surface. On Earth, these craters are easily eroded or destroyed through endogenic processes. The Moon and Mercury, however, lack a significant atmosphere, meaning craters on these worlds remain intact longer, geologically. In this thesis, remote-sensing techniques were used to investigate impact melt emplacement about Mercury’s fresh, complex craters. For complex lunar craters, impact melt is preferentially ejected from the lowest rim elevation, implying topographic control. On Venus, impact melt is preferentially ejected downrange from the impact site, implying impactor-direction control. Mercury, despite its heavily-cratered surface, trends more like Venus than like the Moon. -

2016-2017 US Academic Bowl Round 4
USABB Regional Bowl 2016-2017 Round 4 Round 4 First Half (1) In 2017, one type of these items was described as a \bleak, flavorless, gluten-free wasteland," a description that went viral and inspired record sales. One of these items in the shape of its logo is called a (*) Trefoil when produced by Little Brownie Bakers, one of two national manufacturers of these goods. For ten points, name this foodstuff, sold as an annual fundraiser for a youth organization, whose most popular varieties include Tagalongs and Thin Mints. ANSWER: Girl Scout cookies (prompt on partial answers) (1) In this film, Auli'i Cravalho provides the voice of the title character, who sings \If the wind in my sail on the sea stays behind me, one day I'll know." For ten points each, Name this 2016 Disney film, whose title character searches for the demigod Maui to help save her Polynesian island. ANSWER: Moana This is the aforementioned song, sung by Moana as she sets sail on her journey. It earned an Best Original Song Oscar nomination for its writer, Lin-Manuel Miranda. ANSWER: How Far I'll Go This actor and professional wrestler voices Maui in Moana. ANSWER: Dwayne \The Rock" Johnson (accept either or both) (2) The smallest subspecies of these animals is nicknamed \Tuktu" in the Inuktitut language, and their four-chambered stomachs help them digest their namesake (*) \moss." This is the only deer species in which females grow antlers, which they use to defend the patches of lichen they eat in the tundra. For ten points, name these arctic deer also known as caribou who, in legend, fly to pull Santa's sleigh. -

Geologic Map of the Victoria Quadrangle (H02), Mercury
H01 - Borealis Geologic Map of the Victoria Quadrangle (H02), Mercury 60° Geologic Units Borea 65° Smooth plains material 1 1 2 3 4 1,5 sp H05 - Hokusai H04 - Raditladi H03 - Shakespeare H02 - Victoria Smooth and sparsely cratered planar surfaces confined to pools found within crater materials. Galluzzi V. , Guzzetta L. , Ferranti L. , Di Achille G. , Rothery D. A. , Palumbo P. 30° Apollonia Liguria Caduceata Aurora Smooth plains material–northern spn Smooth and sparsely cratered planar surfaces confined to the high-northern latitudes. 1 INAF, Istituto di Astrofisica e Planetologia Spaziali, Rome, Italy; 22.5° Intermediate plains material 2 H10 - Derain H09 - Eminescu H08 - Tolstoj H07 - Beethoven H06 - Kuiper imp DiSTAR, Università degli Studi di Napoli "Federico II", Naples, Italy; 0° Pieria Solitudo Criophori Phoethontas Solitudo Lycaonis Tricrena Smooth undulating to planar surfaces, more densely cratered than the smooth plains. 3 INAF, Osservatorio Astronomico di Teramo, Teramo, Italy; -22.5° Intercrater plains material 4 72° 144° 216° 288° icp 2 Department of Physical Sciences, The Open University, Milton Keynes, UK; ° Rough or gently rolling, densely cratered surfaces, encompassing also distal crater materials. 70 60 H14 - Debussy H13 - Neruda H12 - Michelangelo H11 - Discovery ° 5 3 270° 300° 330° 0° 30° spn Dipartimento di Scienze e Tecnologie, Università degli Studi di Napoli "Parthenope", Naples, Italy. Cyllene Solitudo Persephones Solitudo Promethei Solitudo Hermae -30° Trismegisti -65° 90° 270° Crater Materials icp H15 - Bach Australia Crater material–well preserved cfs -60° c3 180° Fresh craters with a sharp rim, textured ejecta blanket and pristine or sparsely cratered floor. 2 1:3,000,000 ° c2 80° 350 Crater material–degraded c2 spn M c3 Degraded craters with a subdued rim and a moderately cratered smooth to hummocky floor. -

Charles “Chaz” Bojórquez Interviewed by Karen Mary Davalos on September 25, 27, and 28, and October 2, 2007
CSRC ORAL HISTORIES SERIES NO. 5, NOVEMBER 2013 CHARLES “CHAZ” BOJÓRQUEZ INTERVIEWED BY KAREN MARY DAVALOS ON SEPTEMBER 25, 27, AND 28, AND OCTOBER 2, 2007 Charles “Chaz” Bojórquez is a resident of Los Angeles. He grew up in East Los Angeles, where he developed his distinctive graffiti style. He received formal art training at Guadalajara University of Art in Mexico and California State University and Chouinard Art Institute in Los Angeles. Before devoting his time to painting, he worked as a commercial artist in the film and advertising industries. His work is represented in major private collections and museums, including the Smithsonian American Art Museum, the Museum of Contemporary Art in Los Angeles, and the De Young Museum in San Francisco. Karen Mary Davalos is chair and professor of Chicana/o studies at Loyola Marymount University in Los Angeles. Her research interests encompass representational practices, including art exhibition and collection; vernacular performance; spirituality; feminist scholarship and epistemologies; and oral history. Among her publications are Yolanda M. López (UCLA Chicano Studies Research Center Press, 2008); “The Mexican Museum of San Francisco: A Brief History with an Interpretive Analysis,” in The Mexican Museum of San Francisco Papers, 1971–2006 (UCLA Chicano Studies Research Center Press, 2010); and Exhibiting Mestizaje: Mexican (American) Museums in the Diaspora (University of New Mexico Press, 2001). This interview was conducted as part of the L.A. Xicano project. Preferred citation: Charles “Chaz” Bojórquez, interview with Karen Davalos, September 25, 27, and 28, and October 2, 2007, Los Angeles, California. CSRC Oral Histories Series, no. 5. Los Angeles: UCLA Chicano Studies Research Center Press, 2013. -

High-Resolution Topography of Mercury from Messenger Orbital Stereo Imaging – the Southern Hemisphere Quadrangles
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-3, 2018 ISPRS TC III Mid-term Symposium “Developments, Technologies and Applications in Remote Sensing”, 7–10 May, Beijing, China HIGH-RESOLUTION TOPOGRAPHY OF MERCURY FROM MESSENGER ORBITAL STEREO IMAGING – THE SOUTHERN HEMISPHERE QUADRANGLES F. Preusker 1 *, J. Oberst 1,2, A. Stark 1, S. Burmeister 2 1 German Aerospace Center (DLR), Institute of Planet. Research, Berlin, Germany – (stephan.elgner, frank.preusker, alexander.stark, juergen.oberst)@dlr.de 2 Technical University Berlin, Institute for Geodesy and Geoinformation Sciences, Berlin, Germany – (steffi.burmeister, juergen.oberst)@tu-berlin.de Commission VI, WG VI/4 KEY WORDS: Mercury, MESSENGER, Digital Terrain Models ABSTRACT: We produce high-resolution (222 m/grid element) Digital Terrain Models (DTMs) for Mercury using stereo images from the MESSENGER orbital mission. We have developed a scheme to process large numbers, typically more than 6000, images by photogrammetric techniques, which include, multiple image matching, pyramid strategy, and bundle block adjustments. In this paper, we present models for map quadrangles of the southern hemisphere H11, H12, H13, and H14. 1. INTRODUCTION Mercury requires sophisticated models for calibrations of focal length and distortion of the camera. In particular, the WAC The MErcury Surface, Space ENviorment, GEochemistry, and camera and NAC camera were demonstrated to show a linear Ranging (MESSENGER) spacecraft entered orbit about increase in focal length by up to 0.10% over the typical range of Mercury in March 2011 to carry out a comprehensive temperatures (-20 to +20 °C) during operation, which causes a topographic mapping of the planet. -

2019 Publication Year 2020-12-22T16:29:45Z Acceptance
Publication Year 2019 Acceptance in OA@INAF 2020-12-22T16:29:45Z Title Global Spectral Properties and Lithology of Mercury: The Example of the Shakespeare (H-03) Quadrangle Authors BOTT, NICOLAS; Doressoundiram, Alain; ZAMBON, Francesca; CARLI, CRISTIAN; GUZZETTA, Laura Giovanna; et al. DOI 10.1029/2019JE005932 Handle http://hdl.handle.net/20.500.12386/29116 Journal JOURNAL OF GEOPHYSICAL RESEARCH (PLANETS) Number 124 RESEARCH ARTICLE Global Spectral Properties and Lithology of Mercury: The 10.1029/2019JE005932 Example of the Shakespeare (H-03) Quadrangle Key Points: • We used the MDIS-WAC data to N. Bott1 , A. Doressoundiram1, F. Zambon2 , C. Carli2 , L. Guzzetta2 , D. Perna3 , produce an eight-color mosaic of the and F. Capaccioni2 Shakespeare quadrangle • We identified spectral units from the 1LESIA-Observatoire de Paris-CNRS-Sorbonne Université-Université Paris-Diderot, Meudon, France, 2Istituto di maps of Shakespeare 3 • We selected two regions of high Astrofisica e Planetologia Spaziali-INAF, Rome, Italy, Osservatorio Astronomico di Roma-INAF, Monte Porzio interest as potential targets for the Catone, Italy BepiColombo mission Abstract The MErcury Surface, Space ENvironment, GEochemistry and Ranging mission showed the Correspondence to: N. Bott, surface of Mercury with an accuracy never reached before. The morphological and spectral analyses [email protected] performed thanks to the data collected between 2008 and 2015 revealed that the Mercurian surface differs from the surface of the Moon, although they look visually very similar. The surface of Mercury is Citation: characterized by a high morphological and spectral variability, suggesting that its stratigraphy is also Bott, N., Doressoundiram, A., heterogeneous. Here, we focused on the Shakespeare (H-03) quadrangle, which is located in the northern Zambon, F., Carli, C., Guzzetta, L., hemisphere of Mercury. -
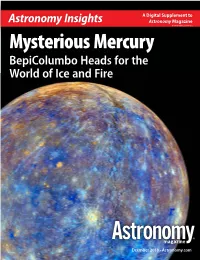
Mysterious Mercury Bepicolumbo Heads for the World of Ice and Fire
A Digital Supplement to Astronomy Insights Astronomy Magazine © 2018 Kalmbach Media Mysterious Mercury BepiColumbo Heads for the World of Ice and Fire Dcember 2018 • Astronomy.com Voyage to a world Color explodes from Mercury’s surface in this enhanced-color mosaic taken through several filters. The yellow and orange hues signify relatively young plains likely formed when fluid lavas erupted from volcanoes. Medium- and dark-blue regions are older terrain, while the light-blue and white streaks represent fresh material excavated from relatively recent impacts. ALL IMAGES, UNLESS OTHERWISE NOTED: NASA/JHUAPL/CIW 2 ASTRONOMY INSIGHTS • DECEMBER 2018 A world of both fire and ice, Mercury excites and confounds scientists. The BepiColombo probe aims to make sense of this mysterious world. by Ben Evans of extremesWWW.ASTRONOMY.COM 3 Mercury is a land of contrasts. The solar system’s smallest planet boasts the largest core relative to its size. Temperatures at noon can soar as high as 800 degrees Fahrenheit (425 degrees Celsius) — hot enough to melt lead — but dip as low as –290 F (–180 C) before dawn. Mercury resides nearest the Sun, and it has the most eccentric orbit. At its closest, the planet lies only 29 mil- lion miles (46 million kilometers) from the Sun — less than one-third Earth’s distance — but swings out as far as 43 million miles (70 million km). Its rapid movement across our sky earned it a reputation among ancient skywatchers as the fleet-footed messenger of the gods: Italian scientist Giuseppe “Bepi” Colombo helped develop a technique for sending a space Hermes to the Greeks and Mercury to the Romans. -
The New Nuclear Forensics: Analysis of Nuclear Material for Security
THE NEW NUCLEAR FORENSICS Analysis of Nuclear Materials for Security Purposes edited by vitaly fedchenko The New Nuclear Forensics Analysis of Nuclear Materials for Security Purposes STOCKHOLM INTERNATIONAL PEACE RESEARCH INSTITUTE SIPRI is an independent international institute dedicated to research into conflict, armaments, arms control and disarmament. Established in 1966, SIPRI provides data, analysis and recommendations, based on open sources, to policymakers, researchers, media and the interested public. The Governing Board is not responsible for the views expressed in the publications of the Institute. GOVERNING BOARD Sven-Olof Petersson, Chairman (Sweden) Dr Dewi Fortuna Anwar (Indonesia) Dr Vladimir Baranovsky (Russia) Ambassador Lakhdar Brahimi (Algeria) Jayantha Dhanapala (Sri Lanka) Ambassador Wolfgang Ischinger (Germany) Professor Mary Kaldor (United Kingdom) The Director DIRECTOR Dr Ian Anthony (United Kingdom) Signalistgatan 9 SE-169 70 Solna, Sweden Telephone: +46 8 655 97 00 Fax: +46 8 655 97 33 Email: [email protected] Internet: www.sipri.org The New Nuclear Forensics Analysis of Nuclear Materials for Security Purposes EDITED BY VITALY FEDCHENKO OXFORD UNIVERSITY PRESS 2015 1 Great Clarendon Street, Oxford OX2 6DP, United Kingdom Oxford University Press is a department of the University of Oxford. It furthers the University’s objective of excellence in research, scholarship, and education by publishing worldwide. Oxford is a registered trade mark of Oxford University Press in the UK and in certain other countries © SIPRI 2015 The moral rights of the authors have been asserted All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, without the prior permission in writing of SIPRI, or as expressly permitted by law, or under terms agreed with the appropriate reprographics rights organizations.