Trajectory Design of the Lucy Mission to Explore the Diversity of the Jupiter Trojans
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Occultation Evidence for a Satellite of the Trojan Asteroid (911) Agamemnon Bradley Timerson1, John Brooks2, Steven Conard3, David W
Occultation Evidence for a Satellite of the Trojan Asteroid (911) Agamemnon Bradley Timerson1, John Brooks2, Steven Conard3, David W. Dunham4, David Herald5, Alin Tolea6, Franck Marchis7 1. International Occultation Timing Association (IOTA), 623 Bell Rd., Newark, NY, USA, [email protected] 2. IOTA, Stephens City, VA, USA, [email protected] 3. IOTA, Gamber, MD, USA, [email protected] 4. IOTA, KinetX, Inc., and Moscow Institute of Electronics and Mathematics of Higher School of Economics, per. Trekhsvyatitelskiy B., dom 3, 109028, Moscow, Russia, [email protected] 5. IOTA, Murrumbateman, NSW, Australia, [email protected] 6. IOTA, Forest Glen, MD, USA, [email protected] 7. Carl Sagan Center at the SETI Institute, 189 Bernardo Av, Mountain View CA 94043, USA, [email protected] Corresponding author Franck Marchis Carl Sagan Center at the SETI Institute 189 Bernardo Av Mountain View CA 94043 USA [email protected] 1 Keywords: Asteroids, Binary Asteroids, Trojan Asteroids, Occultation Abstract: On 2012 January 19, observers in the northeastern United States of America observed an occultation of 8.0-mag HIP 41337 star by the Jupiter-Trojan (911) Agamemnon, including one video recorded with a 36cm telescope that shows a deep brief secondary occultation that is likely due to a satellite, of about 5 km (most likely 3 to 10 km) across, at 278 km ±5 km (0.0931″) from the asteroid’s center as projected in the plane of the sky. A satellite this small and this close to the asteroid could not be resolved in the available VLT adaptive optics observations of Agamemnon recorded in 2003. -

Thermal-IR Spectral Analysis of Jupiter's Trojan Asteroids
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 1238.pdf THERMAL-IR SPECTRAL ANALYSIS OF JUPITER’S TROJAN ASTEROIDS: DETECTING SILICATES. A. C. Martin1, J. P. Emery1, S. S. Lindsay2, 1The University of Tennessee Earth and Planetary Science Department, 1621 Cumberland Avenue, 602 Strong Hall, Knoxville TN, 37996, 2The University of Tennessee, De- partment of Physics, 1408 Circle Drive, Knoxville TN, 37996.. Introduction: Jupiter’s Trojan asteroids (hereafter (e.g., [11],[8]). Had Trojans and JFCs formed in the Trojans) populate Jupiter’s L4 and L5 Lagrange points. same region, Trojans should have fine-grained silicates The L4 and L5 points are dynamically stable over the in primarily amorphous phases. lifetime of the Solar System, and, therefore, Trojans Analysis of TIR spectra by [12] shows that the sur- could have resided in the L4 and L5 regions for nearly faces of three Trojans (624 Hektor, 1172 Aneas, and 911 4.5 Gyr [1]. However, it is still uncertain where the Tro- Agamemnon) have emissivity features similar to fine- jans formed and when they were captured. Asteroid or- grained silicates in comet comae. The TIR wavelength igins provide an effective means of constraining the region is beneficial for silicate mineralogy detection be- events that dynamically shaped the solar system. Tro- cause it contains fundamental Si-O molecular vibrations jans may help in determining the extent of radial mixing (stretching at 9 –12 µm and bending at 14 – 25 µm; that occurred during giant planet migration. [13]). Comets produce optically thin comae that result Trojans are thought to have formed in one of two in strong 10-µm emission features when comprised of locations: (1) in their current position (~5.2 AU), or (2) fine-grained (≤10 to 20 µm) dispersed silicates. -

On the Accuracy of Restricted Three-Body Models for the Trojan Motion
DISCRETE AND CONTINUOUS Website: http://AIMsciences.org DYNAMICAL SYSTEMS Volume 11, Number 4, December 2004 pp. 843{854 ON THE ACCURACY OF RESTRICTED THREE-BODY MODELS FOR THE TROJAN MOTION Frederic Gabern1, Angel` Jorba1 and Philippe Robutel2 Departament de Matem`aticaAplicada i An`alisi Universitat de Barcelona Gran Via 585, 08007 Barcelona, Spain1 Astronomie et Syst`emesDynamiques IMCCE-Observatoire de Paris 77 Av. Denfert-Rochereau, 75014 Paris, France2 Abstract. In this note we compare the frequencies of the motion of the Trojan asteroids in the Restricted Three-Body Problem (RTBP), the Elliptic Restricted Three-Body Problem (ERTBP) and the Outer Solar System (OSS) model. The RTBP and ERTBP are well-known academic models for the motion of these asteroids, and the OSS is the standard model used for realistic simulations. Our results are based on a systematic frequency analysis of the motion of these asteroids. The main conclusion is that both the RTBP and ERTBP are not very accurate models for the long-term dynamics, although the level of accuracy strongly depends on the selected asteroid. 1. Introduction. The Restricted Three-Body Problem models the motion of a particle under the gravitational attraction of two point masses following a (Keple- rian) solution of the two-body problem (a general reference is [17]). The goal of this note is to discuss the degree of accuracy of such a model to study the real motion of an asteroid moving near the Lagrangian points of the Sun-Jupiter system. To this end, we have considered two restricted three-body problems, namely: i) the Circular RTBP, in which Sun and Jupiter describe a circular orbit around their centre of mass, and ii) the Elliptic RTBP, in which Sun and Jupiter move on an elliptic orbit. -

Observations from Orbiting Platforms 219
Dotto et al.: Observations from Orbiting Platforms 219 Observations from Orbiting Platforms E. Dotto Istituto Nazionale di Astrofisica Osservatorio Astronomico di Torino M. A. Barucci Observatoire de Paris T. G. Müller Max-Planck-Institut für Extraterrestrische Physik and ISO Data Centre A. D. Storrs Towson University P. Tanga Istituto Nazionale di Astrofisica Osservatorio Astronomico di Torino and Observatoire de Nice Orbiting platforms provide the opportunity to observe asteroids without limitation by Earth’s atmosphere. Several Earth-orbiting observatories have been successfully operated in the last decade, obtaining unique results on asteroid physical properties. These include the high-resolu- tion mapping of the surface of 4 Vesta and the first spectra of asteroids in the far-infrared wave- length range. In the near future other space platforms and orbiting observatories are planned. Some of them are particularly promising for asteroid science and should considerably improve our knowledge of the dynamical and physical properties of asteroids. 1. INTRODUCTION 1800 asteroids. The results have been widely presented and discussed in the IRAS Minor Planet Survey (Tedesco et al., In the last few decades the use of space platforms has 1992) and the Supplemental IRAS Minor Planet Survey opened up new frontiers in the study of physical properties (Tedesco et al., 2002). This survey has been very important of asteroids by overcoming the limits imposed by Earth’s in the new assessment of the asteroid population: The aster- atmosphere and taking advantage of the use of new tech- oid taxonomy by Barucci et al. (1987), its recent extension nologies. (Fulchignoni et al., 2000), and an extended study of the size Earth-orbiting satellites have the advantage of observing distribution of main-belt asteroids (Cellino et al., 1991) are out of the terrestrial atmosphere; this allows them to be in just a few examples of the impact factor of this survey. -

Structure and Composition of the Surfaces of Trojan Asteroids from Reflection and Emission Spectroscopy
Lunar and Planetary Science XXXVII (2006) 2075.pdf STRUCTURE AND COMPOSITION OF THE SURFACES OF TROJAN ASTEROIDS FROM REFLECTION AND EMISSION SPECTROSCOPY. Joshua. P. Emery,1 Dale. P. Cruikshank,2 and Jeffrey Van Cleve3 1NASA Ames / SETI Institute ([email protected]), 2NASA Ames Research Center ([email protected]), 3 Ball Aerospace ([email protected]). Introduction: The orbits of Trojan asteroids (~5.2 AU – beyond the Main Belt) place them in the transi- 1.0 tion region between the rocky inner and icy outer Solar 0.9 1172 Aneas System. Most Trojans were traditionally thought to 0.8 have originated in this region [3], although other loca- 1.0 tions of origin are possible [e.g., 4,5,6]. Possible con- 0.9 nections between Trojans and other groups of objects 911 Agamemnon 0.8 (Jupiter family comets, irregular satellites, Centaurs, Emissivity KBOs) are also important, but only poorly understood 1.0 [4,6,7,9]. The compositions of Trojans thereby hold 0.9 624 Hektor important clues concerning conditions in this critical 0.8 transition region, and the solar nebula as a whole. We discuss emission and reflection spectra of three Trojans 10 15 20 25 30 35 Wavelength (µm) (624 Hektor, 911 Agamemnon, and 1172 Aneas) and implications for surface structure and composition. Figure 2. Mid-IR emissivity spectra of Trojans. Vis-NIR Reflectance Spectroscopy: Reflectance studies of Trojans in the visible and NIR (0.8 – 4.0 Analysis: The Trojans have a similar spectral shape µm) reveal dark surfaces with mild to very red spectral to some carbonaceous meteorites and fine-grained sili- slopes, but no distinct absorption features (Fig. -

Astrocladistics of the Jovian Trojan Swarms
MNRAS 000,1–26 (2020) Preprint 23 March 2021 Compiled using MNRAS LATEX style file v3.0 Astrocladistics of the Jovian Trojan Swarms Timothy R. Holt,1,2¢ Jonathan Horner,1 David Nesvorný,2 Rachel King,1 Marcel Popescu,3 Brad D. Carter,1 and Christopher C. E. Tylor,1 1Centre for Astrophysics, University of Southern Queensland, Toowoomba, QLD, Australia 2Department of Space Studies, Southwest Research Institute, Boulder, CO. USA. 3Astronomical Institute of the Romanian Academy, Bucharest, Romania. Accepted XXX. Received YYY; in original form ZZZ ABSTRACT The Jovian Trojans are two swarms of small objects that share Jupiter’s orbit, clustered around the leading and trailing Lagrange points, L4 and L5. In this work, we investigate the Jovian Trojan population using the technique of astrocladistics, an adaptation of the ‘tree of life’ approach used in biology. We combine colour data from WISE, SDSS, Gaia DR2 and MOVIS surveys with knowledge of the physical and orbital characteristics of the Trojans, to generate a classification tree composed of clans with distinctive characteristics. We identify 48 clans, indicating groups of objects that possibly share a common origin. Amongst these are several that contain members of the known collisional families, though our work identifies subtleties in that classification that bear future investigation. Our clans are often broken into subclans, and most can be grouped into 10 superclans, reflecting the hierarchical nature of the population. Outcomes from this project include the identification of several high priority objects for additional observations and as well as providing context for the objects to be visited by the forthcoming Lucy mission. -

Deliverable H2020 COMPET-05-2015 Project "Small
Deliverable H2020 COMPET-05-2015 project "Small Bodies: Near And Far (SBNAF)" Topic: COMPET-05-2015 - Scientific exploitation of astrophysics, comets, and planetary data Project Title: Small Bodies Near and Far (SBNAF) Proposal No: 687378 - SBNAF - RIA Duration: Apr 1, 2016 - Mar 31, 2019 WP WP5 Del.No D5.3 Title Occultation candidates for 2018 Lead Beneficiary CSIC Nature Report Dissemination Level Public Est. Del. Date 20 Dec 2017 Version 1.0 Date 20 Dec 2017 Lead Author Pablo Santos-Sanz, Instituto de Astrofísica de Andalucía-CSIC, [email protected] WP5 Ground based observations Objectives: The main objective of WP5 is to execute observations from ground- based telescopes with the goal to acquire more data on the SBNAF targets. One of the scheduled observations is the occultation of a star by a Main Belt Asteroid (MBA), a Centaur or a Trans-Neptunian Object (TNO). For this particular stellar occultation technique the main tasks are: i) to predict the stellar occultation, ii) to coordinate the observations, and iii) to produce results on physical parameters of the MBAs, Centaurs and TNOs (i.e. sizes, shapes, albedos, densities, etc). Description of deliverable D5.3 The potential occultation candidates for 2018 are presented. This deliverable follows deliverables D5.1 and D5.2, and is related to milestones MS5 “Occultation predictions with 10 mas accuracy”, and MS12 “25 successful TNO occultation measurements”. In this document, we first give a short state of the art of the stellar occultation technique (Section 1), then we discuss about the expected goal to reach ~10 mas accuracy in the prediction of stellar occultations by TNOs (Section 2). -

A Low Density of 0.8 G Cm-3 for the Trojan Binary Asteroid 617 Patroclus
Publisher: NPG; Journal: Nature:Nature; Article Type: Physics letter DOI: 10.1038/nature04350 A low density of 0.8 g cm−3 for the Trojan binary asteroid 617 Patroclus Franck Marchis1, Daniel Hestroffer2, Pascal Descamps2, Jérôme Berthier2, Antonin H. Bouchez3, Randall D. Campbell3, Jason C. Y. Chin3, Marcos A. van Dam3, Scott K. Hartman3, Erik M. Johansson3, Robert E. Lafon3, David Le Mignant3, Imke de Pater1, Paul J. Stomski3, Doug M. Summers3, Frederic Vachier2, Peter L. Wizinovich3 & Michael H. Wong1 1Department of Astronomy, University of California, 601 Campbell Hall, Berkeley, California 94720, USA. 2Institut de Mécanique Céleste et de Calculs des Éphémérides, UMR CNRS 8028, Observatoire de Paris, 77 Avenue Denfert-Rochereau, F-75014 Paris, France. 3W. M. Keck Observatory, 65-1120 Mamalahoa Highway, Kamuela, Hawaii 96743, USA. The Trojan population consists of two swarms of asteroids following the same orbit as Jupiter and located at the L4 and L5 stable Lagrange points of the Jupiter–Sun system (leading and following Jupiter by 60°). The asteroid 617 Patroclus is the only known binary Trojan1. The orbit of this double system was hitherto unknown. Here we report that the components, separated by 680 km, move around the system’s centre of mass, describing a roughly circular orbit. Using this orbital information, combined with thermal measurements to estimate +0.2 −3 the size of the components, we derive a very low density of 0.8 −0.1 g cm . The components of 617 Patroclus are therefore very porous or composed mostly of water ice, suggesting that they could have been formed in the outer part of the Solar System2. -
Iso and Asteroids
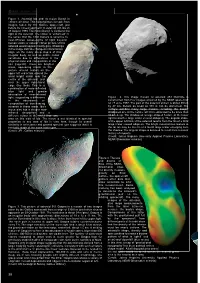
r bulletin 108 Figure 1. Asteroid Ida and its moon Dactyl in enhanced colour. This colour picture is made from images taken by the Galileo spacecraft just before its closest approach to asteroid 243 Ida on 28 August 1993. The moon Dactyl is visible to the right of the asteroid. The colour is ‘enhanced’ in the sense that the CCD camera is sensitive to near-infrared wavelengths of light beyond human vision; a ‘natural’ colour picture of this asteroid would appear mostly grey. Shadings in the image indicate changes in illumination angle on the many steep slopes of this irregular body, as well as subtle colour variations due to differences in the physical state and composition of the soil (regolith). There are brighter areas, appearing bluish in the picture, around craters on the upper left end of Ida, around the small bright crater near the centre of the asteroid, and near the upper right-hand edge (the limb). This is a combination of more reflected blue light and greater absorption of near-infrared light, suggesting a difference Figure 2. This image mosaic of asteroid 253 Mathilde is in the abundance or constructed from four images acquired by the NEAR spacecraft composition of iron-bearing on 27 June 1997. The part of the asteroid shown is about 59 km minerals in these areas. Ida’s by 47 km. Details as small as 380 m can be discerned. The moon also has a deeper near- surface exhibits many large craters, including the deeply infrared absorption and a shadowed one at the centre, which is estimated to be more than different colour in the violet than any 10 km deep. -

Kuiper Belt and Comets: an Observational Perspective
Kuiper Belt and Comets: An Observational Perspective David Jewitt1 1. Institute for Astronomy, University of Hawaii, 2680 Woodlawn Drive, Honolulu, HI 96822 [email protected] Note to the Reader These notes outline a series of lectures given at the Saas Fee Winter School held in Murren, Switzerland, in March 2005. As I see it, the main aim of the Winter School is to communicate (especially) with young people in order to inflame their interests in science and to encourage them to see ways in which they can contribute and maybe do a better job than we have done so far. With this in mind, I have written up my lectures in a less than formal but hopefully informative and entertaining style, and I have taken a few detours to discuss subjects that I think are important but which are usually glossed-over in the scientific literature. 1 Preamble Almost exactly 400 years ago, planetary astronomy kick-started the era of modern science, with a series of remarkable discoveries by Galileo concerning the surfaces of the Moon and Sun, the phases of Venus, and the existence and motions of Jupiter’s large satellites. By the early 20th century, the fo- cus of astronomical attention had turned to objects at larger distances, and to questions of galactic structure and cosmological interest. At the start of the 21st century, the tide has turned again. The study of the Solar system, particularly of its newly discovered outer parts, is one of the hottest topics in modern astrophysics with great potential for revealing fundamental clues about the origin of planets and even the emergence of life. -

Ground-Based Observations of Asteroids to Support Gaia Data Exploitation
Ground-based Observations of Asteroids to Support Gaia Data Exploitation Gaia-RIA Workshop 2020 Institut de Ciencies` del Cosmos, Universitat de Barcelona February 2020 Toni Santana-Ros [email protected] STATE OF THE ART IN MINOR BODIES MODELLING Minor bodies with ground-truth Visited Targeted Minor planets 15 (2)* 4 Comets 9 2 * Far flyby, image not resolved Minor planets known: >850.000 Comets discovered: ∼ 4.000 Source: Minor Planet Center Figure: Top: Artist’s concept of NEAR Shoemaker (left) and Rosetta (right) spacecrafts. Middle: In situ imaging of 433 Eros (left) and 21 Lutetia (right). Bottom: Corresponding models derived with the SAGE inversion technique from ground-based lightcurves only (Bartczak, Santana-Ros et al., ACM 2014). Knowledge from remote observations Figure: Physical properties derived from remote observations Asteroid modeling: Lightcurves are the main source Figure: A composite lightcurve of main belt asteroid 114 Kassandra. Asteroid modeling: Inversion technique Figure: Earth-centered ecliptic longitudes of an asteroid at different apparitions. >2400 shape models available MINOR BODIES MEET BIG DATA What we do have so far? Gaia DR2 Asteroid content in Gaia DR2 14 099 objects 1 977 702 observations 22 months CLICK ME! Figure: Asteroid orbits derived from DR2. Orbits are coloured following the albedo of asteroids. Asteroid sparse data from Gaia DR2 Figure: Gaia DR2 photometry of asteroid 511 Davida. Asteroid modeling with Gaia data: Genetic algorithm We assume that the objects can be represented by triaxial ellipsoids (In order to avoid highly CPU intensive calculations). The Gaia genetic algorithm (Cellino et al. 2014) search for the best fit of: • Pole coordinates (λ, β) • Sidereal Rotation Period (P) • Axial Ratios (b=a, c=a) • Rotational phase at epoch of first observations (ϕ0) Asteroid modeling with Gaia data: Genetic algorithm We assume that the objects can be represented by triaxial ellipsoids (In order to avoid highly CPU intensive calculations). -
Constraints on the Composition of Trojan Asteroid 624 Hektor Dale P
Constraints on the Composition of Trojan Asteroid 624 Hektor Dale P. Cruikshank 1'2 NASA Ames Research Center, MS 245-6, Moffett Field, California 94035-1000 E-mail: dcruikshank @ mail.arc.nasa.gov Cristina M. Dalle Ore SETI Institute and NASA Ames Research Center, MS 245-6, Moffett Field, California 94035-1000 Ted L. Roush NASA Ames Research Center, MS 245-3, Moffett Field, California 94035-1000 Thomas R. Geballe Gemini Observatory, 670 N. A'ohoku Place, Hilo, Hawaii 96720 Tobias C. Owen 1 Institute for Astronomy, 2680 Woodlawn Drive, Honolulu, Hawaii 96822 Catherine de Bergh 1 Observatoire de Paris, 4 Place Jules Jannsen, 92195 Meudon Cedex, France Michele D. Cash Stanford University, P.O. Box 16637, Stanford, California 94309 William K. Hartmann 2 Planetary Science Institute, 620 N. 6th Avenue, Tucson, Arizona 85715-8331 Submitted to Icarus December 12, 2000 Received Pages: 39 Figures: 7 Tables: 3 1. Guest observer, United Kingdom Infrared Telescope facility (UKIRT) 2. Guest observer, NASA Infrared Telescope Facility (IRTF) Proposed Running Head: Composition of Trojan Asteroid Hektor Address for Correspondence: Dale P. Cruikshank Mail Stop 245-6 NASA Ames Research Center Moffett Field, CA 94035-1000 dcruikshank @ mail.arc.n asa.gov Phone: 650-604-4244, Fax: 650-604-6779 Key Words: Asteroids, Composition Mineralogy Surfaces, Asteroids Spectroscopy ABSTRACT We presenta compositespectrumof Trojan asteroid624Hektor,0.3-3.6 p.m,which showsthatthereis no discernible3-p.mabsorptionband. Suchabandwould indicatethe presenceof OH or H20- bearing silicate minerals, or macromolecular carbon-rich organic material of the kind seen on the low-albedo hemisphere of Saturn's satellite Iapetus (Owen et al.