Spacecraft Autonomy Challenges for Next Generation Space Missions Marco Pavone* Behc¸Et Ac¸Ikmes¸E† Issa A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Human to Robot Whole-Body Motion Transfer
Human to Robot Whole-Body Motion Transfer Miguel Arduengo1, Ana Arduengo1, Adria` Colome´1, Joan Lobo-Prat1 and Carme Torras1 Abstract— Transferring human motion to a mobile robotic manipulator and ensuring safe physical human-robot interac- tion are crucial steps towards automating complex manipu- lation tasks in human-shared environments. In this work, we present a novel human to robot whole-body motion transfer framework. We propose a general solution to the correspon- dence problem, namely a mapping between the observed human posture and the robot one. For achieving real-time imitation and effective redundancy resolution, we use the whole-body control paradigm, proposing a specific task hierarchy, and present a differential drive control algorithm for the wheeled robot base. To ensure safe physical human-robot interaction, we propose a novel variable admittance controller that stably adapts the dynamics of the end-effector to switch between stiff and compliant behaviors. We validate our approach through several real-world experiments with the TIAGo robot. Results show effective real-time imitation and dynamic behavior adaptation. Fig. 1. Transferring human motion to robots while ensuring safe human- This constitutes an easy way for a non-expert to transfer a robot physical interaction can be a powerful and intuitive tool for teaching assistive tasks such as helping people with reduced mobility to get dressed. manipulation skill to an assistive robot. The classical approach for human motion transfer is I. INTRODUCTION kinesthetic teaching. The teacher holds the robot along the Service robots may assist people at home in the future. trajectories to be followed to accomplish a specific task, However, robotic systems still face several challenges in while the robot does gravity compensation [6]. -

Abstract #1643
1/20/2017 CIM | TPMS | Abstract #1643 English Proving and Improving Martian Mining ISRU technology in Hawai`i The island of Hawai`i has been the stage for the only NASA ISRU field tests in 2008, 2010 and 2012. Focused on lunar ISRU and the RESOLVE/Resource Prospector Mission, much can be learned and developed from these experiences as applied to Martian ISRU. Hawaiian tephra has proven geochemical similarities to Mars, and also is the source of the geotechnical NASAJSC1A Mars Simulant. Hawaii is ideal for long term facilities/equipment testing and operational models needed prior to extended human missions to Mars. French No abstract title in French No French resume Author(s) and CoAuthor(s) Mr. John C. Hamilton EPO: Logistics Manager PISCES Pacific International Space Center for Exploration Systems https://www.cim.org/en/TPMSEvent/Chair/ChairAbstractPool.aspx 1/1 4/26/2017 CIM | TPMS | Profile of Mr. John Hamilton General Email(s): [email protected] Position: EPO: Logistics Manager Preferred Language: [Language not defined] Addresses Business Home PISCES Pacific International Space Center for Exploration Systems PO Box 615 Pepeekeo Hawaii United States 96720 Biographies Biography submitted with the abstract John Hamilton is on faculty with the Department of Physics and Astronomy at the University of Hawaii at Hilo, on the majestic island of Hawaii. As the Research Operations Manager of the newly formed PISCES (the Pacific International Space Center for Exploration Systems) in 2007 at the university, he managed multiple field tests with NASA, CSA, DLR, and ESA with surface technologies and ISRU. PISCES later was spun off as a State Agency, where John serves in the dual role of Education/Public Outreach and Logistics manager. -
Autonomous Mobile Robots Annual Report 1985
The Mobile Robot Laboratory Sonar Mapping, Imaging and Navigation Visual Navigation Road Following i Motion Control The Robots Motivation Publications Autonomous Mobile Robots Annual Report 1985 Mobile Robot Laboratory CM U-KI-TK-86-4 Mobile Robot Laboratory The Robotics Institute Carncgie Mcllon University Pittsburgh, Pcnnsylvania 15213 February 1985 Copyright @ 1986 Carnegie-Mellon University This rcscarch was sponsored by The Office of Naval Research, under Contract Number NO00 14-81-K-0503. 1 Table of Contents The Mobile Robot Laboratory ‘I’owards Autonomous Vchiclcs - Moravcc ct 31. 1 Sonar Mapping, Imaging and Navigation High Resolution Maps from Wide Angle Sonar - Moravec, et al. 19 A Sonar-Based Mapping and Navigation System - Elfes 25 Three-Dirncnsional Imaging with Cheap Sonar - Moravec 31 Visual Navigation Experiments and Thoughts on Visual Navigation - Thorpe et al. 35 Path Relaxation: Path Planning for a Mobile Robot - Thorpe 39 Uncertainty Handling in 3-D Stereo Navigation - Matthies 43 Road Following First Resu!ts in Robot Road Following - Wallace et al. 65 A Modified Hough Transform for Lines - Wallace 73 Progress in Robot Road Following - Wallace et al. 77 Motion Control Pulse-Width Modulation Control of Brushless DC Motors - Muir et al. 85 Kinematic Modelling of Wheeled Mobile Robots - Muir et al. 93 Dynamic Trajectories for Mobile Robots - Shin 111 The Robots The Neptune Mobile Robot - Podnar 123 The Uranus Mobile Robot, a First Look - Podnar 127 Motivation Robots that Rove - Moravec 131 Bibliography 147 ii Abstract Sincc 13s 1. (lic Mobilc I<obot IAoratory of thc Kohotics Institute 01' Crrrncfiic-Mcllon IInivcnity has conduclcd hsic rcscarcli in aTCiiS crucial fur ;iiitonomoiis robots. -

The Autonomous Underwater Vehicle Initiative – Project Mako
Published at: 2004 IEEE Conference on Robotics, Automation, and Mechatronics (IEEE-RAM), Dec. 2004, Singapore, pp. 446-451 (6) The Autonomous Underwater Vehicle Initiative – Project Mako Thomas Bräunl, Adrian Boeing, Louis Gonzales, Andreas Koestler, Minh Nguyen, Joshua Petitt The University of Western Australia EECE – CIIPS – Mobile Robot Lab Crawley, Perth, Western Australia [email protected] Abstract—We present the design of an autonomous underwater vehicle and a simulation system for AUVs as part II. AUV COMPETITION of the initiative for establishing a new international The AUV Competition will comprise two different competition for autonomous underwater vehicles, both streams with similar tasks physical and simulated. This paper describes the competition outline with sample tasks, as well as the construction of the • Physical AUV competition and AUV and the simulation platform. 1 • Simulated AUV competition Competitors have to solve the same tasks in both Keywords—autonomous underwater vehicles; simulation; streams. While teams in the physical AUV competition competition; robotics have to build their own AUV (see Chapter 3 for a description of a possible entry), the simulated AUV I. INTRODUCTION competition only requires the design of application Mobile robot research has been greatly influenced by software that runs with the SubSim AUV simulation robot competitions for over 25 years [2]. Following the system (see Chapter 4). MicroMouse Contest and numerous other robot The competition tasks anticipated for the first AUV competitions, the last decade has been dominated by robot competition (physical and simulation) to be held around soccer through the FIRA [6] and RoboCup [5] July 2005 in Perth, Western Australia, are described organizations. -
The Comet's Tale
THE COMET’S TALE Newsletter of the Comet Section of the British Astronomical Association Volume 5, No 1 (Issue 9), 1998 May A May Day in February! Comet Section Meeting, Institute of Astronomy, Cambridge, 1998 February 14 The day started early for me, or attention and there were displays to correct Guide Star magnitudes perhaps I should say the previous of the latest comet light curves in the same field. If you haven’t day finished late as I was up till and photographs of comet Hale- got access to this catalogue then nearly 3am. This wasn’t because Bopp taken by Michael Hendrie you can always give a field sketch the sky was clear or a Valentine’s and Glynn Marsh. showing the stars you have used Ball, but because I’d been reffing in the magnitude estimate and I an ice hockey match at The formal session started after will make the reduction. From Peterborough! Despite this I was lunch, and I opened the talks with these magnitude estimates I can at the IOA to welcome the first some comments on visual build up a light curve which arrivals and to get things set up observation. Detailed instructions shows the variation in activity for the day, which was more are given in the Section guide, so between different comets. Hale- reminiscent of May than here I concentrated on what is Bopp has demonstrated that February. The University now done with the observations and comets can stray up to a offers an undergraduate why it is important to be accurate magnitude from the mean curve, astronomy course and lectures are and objective when making them. -

Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion
TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Angewandte Mechanik Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion Entwurf und Realisierung eines Humanoiden Roboters für Schnelles und Autonomes Laufen Dipl.-Ing. Univ. Sebastian Lohmeier Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität München zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. Udo Lindemann Prüfer der Dissertation: 1. Univ.-Prof. Dr.-Ing. habil. Heinz Ulbrich 2. Univ.-Prof. Dr.-Ing. Horst Baier Die Dissertation wurde am 2. Juni 2010 bei der Technischen Universität München eingereicht und durch die Fakultät für Maschinenwesen am 21. Oktober 2010 angenommen. Colophon The original source for this thesis was edited in GNU Emacs and aucTEX, typeset using pdfLATEX in an automated process using GNU make, and output as PDF. The document was compiled with the LATEX 2" class AMdiss (based on the KOMA-Script class scrreprt). AMdiss is part of the AMclasses bundle that was developed by the author for writing term papers, Diploma theses and dissertations at the Institute of Applied Mechanics, Technische Universität München. Photographs and CAD screenshots were processed and enhanced with THE GIMP. Most vector graphics were drawn with CorelDraw X3, exported as Encapsulated PostScript, and edited with psfrag to obtain high-quality labeling. Some smaller and text-heavy graphics (flowcharts, etc.), as well as diagrams were created using PSTricks. The plot raw data were preprocessed with Matlab. In order to use the PostScript- based LATEX packages with pdfLATEX, a toolchain based on pst-pdf and Ghostscript was used. -

Smart Sensors and Small Robots
IEEE Instrumentation and Measurement Technology Conference Budapest, Hungary, May 21-23, 2001. Smart Sensors and Small Robots Mel Siegel Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213-2605, USA Phone: +1 412 268 88025, Fax: +1 412 268 5569 Email: [email protected], URL: http://www.cs.cmu.edu/~mws Abstract – Robots are machines that sense, think, act and (more Thinking: Cognition is a prerequisite for adaptability, with- recently) communicate. Sensing, thinking, and communicating out which no real machine could operate for any significant have all been greatly miniaturized as a consequence of continuous progress in integrated circuit design and manufacturing technol- time in any real environment. No predetermined plan could ogy. More recent progress in MEMS (micro electro mechanical realistically anticipate every feature of the environment - and systems) now holds out promise for comparable miniaturization of if it could, the mission might be utilitarian, but it would the heretofore-retarded third member of the sense-think-act- hardly be interesting, as what would be its purpose if there communicate quartet. More speculatively, initial experiments toward microbiological approaches to robotics suggest possibilities were no new knowledge to be gained? Anyway, even a toy for even further miniaturization, perhaps eventually extending mission in a completely known environment would soon fail down to the molecular level. Alongside smart sensing for robots, in open-loop operation, as accumulated mechanical and sen- with miniaturization of the electromechanical components, i.e., the sor errors would inevitably lead to disastrous discrepancies machinery of robotic manipulation and mobility, we quite natu- rally acquire the capability of smart sensing by robots. -
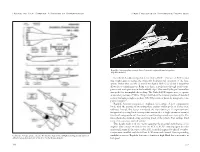
Facing the Heat Barrier: a History of Hypersonics First Thoughts of Hypersonic Propulsion
Facing the Heat Barrier: A History of Hypersonics First Thoughts of Hypersonic Propulsion Republic’s Aerospaceplane concept showed extensive engine-airframe integration. (Republic Aviation) For takeoff, Lockheed expected to use Turbo-LACE. This was a LACE variant that sought again to reduce the inherently hydrogen-rich operation of the basic system. Rather than cool the air until it was liquid, Turbo-Lace chilled it deeply but allowed it to remain gaseous. Being very dense, it could pass through a turbocom- pressor and reach pressures in the hundreds of psi. This saved hydrogen because less was needed to accomplish this cooling. The Turbo-LACE engines were to operate at chamber pressures of 200 to 250 psi, well below the internal pressure of standard rockets but high enough to produce 300,000 pounds of thrust by using turbocom- pressed oxygen.67 Republic Aviation continued to emphasize the scramjet. A new configuration broke with the practice of mounting these engines within pods, as if they were turbojets. Instead, this design introduced the important topic of engine-airframe integration by setting forth a concept that amounted to a single enormous scramjet fitted with wings and a tail. A conical forward fuselage served as an inlet spike. The inlets themselves formed a ring encircling much of the vehicle. Fuel tankage filled most of its capacious internal volume. This design study took two views regarding the potential performance of its engines. One concept avoided the use of LACE or ACES, assuming again that this craft could scram all the way to orbit. Still, it needed engines for takeoff so turbo- ramjets were installed, with both Pratt & Whitney and General Electric providing Lockheed’s Aerospaceplane concept. -

Mars Exploration Entry, Descent and Landing Challenges1,2
Mars Exploration Entry, Descent and Landing Challenges1,2 Robert D. Braun Robert M. Manning Georgia Institute of Technology Jet Propulsion Laboratory Atlanta, GA 30332-0150 California Institute of Technology (404) 385-6171 Pasadena, CA 91109 [email protected] (818) 393-7815 [email protected] Abstract—The United States has successfully landed five interesting locations within close proximity (10’s of m) of robotic systems on the surface of Mars. These systems all pre-positioned robotic assets. These plans require a had landed mass below 0.6 metric tons (t), had landed simultaneous two order of magnitude increase in landed footprints on the order of hundreds of km and landed at sites mass capability, four order of magnitude increase in landed below -1 km MOLA elevation due the need to perform accuracy, and an entry, descent and landing operations entry, descent and landing operations in an environment sequence that may need to be completed in a lower density with sufficient atmospheric density. Current plans for (higher surface elevation) environment. This is a tall order human exploration of Mars call for the landing of 40-80 t that will require the space qualification of new EDL surface elements at scientifically interesting locations within approaches and technologies. close proximity (10’s of m) of pre-positioned robotic assets. This paper summarizes past successful entry, descent and Today, robotic exploration systems engineers are struggling landing systems and approaches being developed by the with the challenges of increasing landed mass capability to 1 robotic Mars exploration program to increased landed t while improving landed accuracy to 10’s of km and performance (mass, accuracy and surface elevation). -

Comet Resources Comet Books Cometography: a Catalog of Comets, by Gary Kronk
APPENDIX Comet Resources Comet Books Cometography: A Catalog of Comets, by Gary Kronk. Cometography Volume 1. Ancient – 1799. Cambridge University Press 1999. ISBN-13: 978-0521585040. Cometography Volume 2. 1800 – 1899. Cambridge University Press 2003. ISBN-13: 978-0521585057. Cometography Volume 3. 1900 – 1932. Cambridge University Press 2007. ISBN-13: 978-0521585064. Cometography Volume 4. 1933 – 1959. Cambridge University Press 2008. ISBN-13: 978-0521585071. Cometography Volume 5. 1960 – 1982. Cambridge University Press 2010. ISBN-13: 978-0521872263. David Levy's Guide to Observing and Discovering Comets. Cambridge University Press 2003. ISBN-13: 978-0521520515. The Greatest Comets in History: Broom Stars and Celestial Scimitars by David Seargent. Springer. ISBN-13: 978-0387095127. 2008. Comets: A Chronological History of Observation, Science, Myth, and Folklore by Donald K. Yeomans. John Wiley & Sons 1991. ISBN-13: 978-0471610113. Great Comets by Robert Burnham. Cambridge University Press 2000. ISBN-13: 978-0521646000. 383 384 Appendix Comets and How to Observe Them by Richard Schmude. Springer 2010. ISBN-13: 978-1441957894. Observing Comets by Nick James and Gerald North. Springer 2002. ISBN-13: 978-1852335571. Comets, Popular Culture, and the Birth of Modern Cosmology by Sara Schechner Genuth. Princeton University Press 1999. ISBN-13: 978-0691009254. Fire in the Sky: Comets and Meteors, the Decisive Centuries in British Art and Science by Olson and Pasachoff. Cambridge University Press 1999. ISBN-13: 978-0521663595. Comets II (University -

Suborbital Reusable Launch Vehicles and Applicable Markets
SUBORBITAL REUSABLE LAUNCH VEHICLES AND APPLICABLE MARKETS Prepared by J. C. MARTIN and G. W. LAW Space Launch Support Division Space Launch Operations October 2002 Space Systems Group THE AEROSPACE CORPORATION El Segundo, CA 90245-4691 Prepared for U. S. DEPARTMENT OF COMMERCE OFFICE OF SPACE COMMERCIALIZATION Herbert C. Hoover Building 14th and Constitution Ave., NW Washington, DC 20230 (202) 482-6125, 482-5913 Contract No. SB1359-01-Z-0020 PUBLIC RELEASE IS AUTHORIZED Preface This report has been prepared by The Aerospace Corporation for the Department of Commerce, Office of Space Commercialization, under contract #SB1359-01-Z-0020. The objective of this report is to characterize suborbital reusable launch vehicle (RLV) concepts currently in development, and define the military, civil, and commercial missions and markets that could capitalize on their capabilities. The structure of the report includes a brief background on orbital vs. suborbital trajectories, as well as an overview of expendable and reusable launch vehicles. Current and emerging market opportunities for suborbital RLVs are identified and discussed. Finally, the report presents the technical aspects and program characteristics of selected U.S. and international suborbital RLVs in development. The appendix at the end of this report provides further detail on each of the suborbital vehicles, as well as the management biographies for each of the companies. The integration of suborbital RLVs with existing airports and/or spaceports, though an important factor that needs to be evaluated, was not the focus of this effort. However, it should be noted that the RLV concepts discussed in this report are being designed to minimize unique facility requirements. -

Climate Change Two Satellites That Could Cool the Debate
February 2014 Target: Climate change Two satellites that could cool the debate Managing air traffic, page 32 Moonwalking with Buzz, page 24 WHAT HAPPENS WHEN MICHIGAN means business It’s a new day for business in Michigan. Through a series of recent initiatives, Michigan is once again becoming a preferred place for business. Starting with a new flat 6% business tax. The elimination of personal property taxes. New right-to-work legislation. All added to redesigned incentive programs and streamlined regulatory processes. All to create an ideal combination of opportunity, resources and passion for business right here in Michigan. 1.888.565.0052 michiganbusiness.org/AA Michigan Economic Development Corporation February 2014 DEPARTMENTS EDITOR’S NOTEBOOK 2 Unsettled business. LETTERS TO THE EDITOR 3 Show some optimism. INTERNATIONAL BEAT 4 Space tourism sets sights on 2014. SCITECH 2014 8 Page 32 News and quotes from the annual forum. CONVERSATION 10 NASA’s chief scientest Ellen Stofan. ENGINEERING NOTEBOOK 12 Laser eye on aircraft ice. GREEN ENGINEERING 16 Runway taxiing goes green. CAREER PROFILE 18 Outreach 101: Listen. THE VIEW FROM HERE 20 Grading “Gravity”. Page 24 OUT OF THE PAST 44 CAREER OPPORTUNITIES 46 FEATURES “MOONWALKING” WITH BUZZ 24 Buzz Aldrin and the author travel together on a book tour. by Leonard David TARGET: CLIMATE CHANGE 26 Page 20 In the next two years, NASA will launch satellites to study the concentration of carbon dioxide in the atmosphere. by Natalia Mironova AIR TRAFFIC CONTROLLERS FACE AUTOMATION 32 Page 16 The promised revolution in air traffic management will bring automation on a grand scale.