20150018579.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ARC-OVER April
April Upcoming Events Next Board Meeting: May 6 Next General Meeting: May 12 Field Day: June 27 & 28 Pacificon: October 16 - 18 Dayton Hamvention May 15 TARC Meeting April 14, 2015 Turlock, War Memorial 7:00 p.m. Ron Roos, KJ6KNL, Our honorable President, called the meeting to order Pledge of Allegiance, All members and guests introduced themselves. Dylan Low, KK6SYD, was a first time guest. All were welcomed. Dick Decker, Vice President, K6SUU, gave an interesting presentation on Hams In Space. This was the topic members showed the most interest in. Fox 1 will launch on August 27th, 2015. To contact Space Stations in the past the Uplink was on VHF and the Downlink on UHF. This is now reversed, the Uplink will be UHF and the Downlink will be VHF. For a full copy of the Powerpoint Presentation, Dick announced that those interested could send an email to him and he would send it to those requesting it. Included in the Powerpoint will be the links for further information. Dick explained that Space stations were easier to use than Satellites. A variety of antennas were shown and discussed. They included; The Yagi, Two Elk Antennas (mounted on PVC) and one that really measured up; The Tape Measure Antenna. Dick informed all that he has a radio that members could use to hit the Space Station. Please contact him if you are interested. The process is pretty simple and it is rewarding when you get your card back in the mail! Dick’s email is; [email protected] 1 Ron Roos, asked members if they had read the minutes from our March 10th Meeting. -

IAF-01-T.1.O1 Progress on the International Space Station
https://ntrs.nasa.gov/search.jsp?R=20150020985 2019-08-31T05:38:38+00:00Z IAF-01-T.1.O1 Progress on the International Space Station - We're Part Way up the Mountain John-David F. Bartoe and Thomas Holloway NASA Johnson Space Center, Houston, Texas, USA The first phase of the International Space Station construction has been completed, and research has begun. Russian, U.S., and Canadian hardware is on orbit, ard Italian logistics modules have visited often. With the delivery of the U.S. Laboratory, Destiny, significant research capability is in place, and dozens of U.S. and Russian experiments have been conducted. Crew members have been on orbit continuously since November 2000. Several "bumps in the road" have occurred along the way, and each has been systematically overcome. Enormous amounts of hardware and software are being developed by the International Space Station partners and participants around the world and are largely on schedule for launch. Significant progress has been made in the testing of completed elements at launch sites in the United States and Kazakhstan. Over 250,000 kg of flight hardware have been delivered to the Kennedy Space Center and integrated testing of several elements wired together has progressed extremely well. Mission control centers are fully functioning in Houston, Moscow, and Canada, and operations centers Darmstadt, Tsukuba, Turino, and Huntsville will be going on line as they are required. Extensive coordination efforts continue among the space agencies of the five partners and two participants, involving 16 nations. All of them continue to face their own challenges and have achieved significant successes. -

The International Space Station and the Space Shuttle
Order Code RL33568 The International Space Station and the Space Shuttle Updated November 9, 2007 Carl E. Behrens Specialist in Energy Policy Resources, Science, and Industry Division The International Space Station and the Space Shuttle Summary The International Space Station (ISS) program began in 1993, with Russia joining the United States, Europe, Japan, and Canada. Crews have occupied ISS on a 4-6 month rotating basis since November 2000. The U.S. Space Shuttle, which first flew in April 1981, has been the major vehicle taking crews and cargo back and forth to ISS, but the shuttle system has encountered difficulties since the Columbia disaster in 2003. Russian Soyuz spacecraft are also used to take crews to and from ISS, and Russian Progress spacecraft deliver cargo, but cannot return anything to Earth, since they are not designed to survive reentry into the Earth’s atmosphere. A Soyuz is always attached to the station as a lifeboat in case of an emergency. President Bush, prompted in part by the Columbia tragedy, made a major space policy address on January 14, 2004, directing NASA to focus its activities on returning humans to the Moon and someday sending them to Mars. Included in this “Vision for Space Exploration” is a plan to retire the space shuttle in 2010. The President said the United States would fulfill its commitments to its space station partners, but the details of how to accomplish that without the shuttle were not announced. The shuttle Discovery was launched on July 4, 2006, and returned safely to Earth on July 17. -
Post Increment Evaluation Report Increment 11 International Space
SSP 54311 Baseline WWW.NASAWATCH.COM Post Increment Evaluation Report Increment 11 International Space Station Program Baseline June 2006 National Aeronautics and Space Administration International Space Station Program Johnson Space Center Houston, Texas Contract Number: NNJ04AA02C WWW.NASAWATCH.COM SSP 54311 Baseline - WWW.NASAWATCH.COM REVISION AND HISTORY PAGE REV. DESCRIPTION PUB. DATE - Initial Release (Reference per SSCD XXXXXX, EFF. XX-XX-XX) XX-XX-XX WWW.NASAWATCH.COM SSP 54311 Baseline - WWW.NASAWATCH.COM INTERNATIONAL SPACE STATION PROGRAM POST INCREMENT EVALUATION REPORT INCREMENT 11 CHANGE SHEET Month XX, XXXX Baseline Space Station Control Board Directive XXXXXX/(X-X), dated XX-XX-XX. (X) CHANGE INSTRUCTIONS SSP 54311, Post Increment Evaluation Report Increment 11, has been baselined by the authority of SSCD XXXXXX. All future updates to this document will be identified on this change sheet. WWW.NASAWATCH.COM SSP 54311 Baseline - WWW.NASAWATCH.COM INTERNATIONAL SPACE STATION PROGRAM POST INCREMENT EVALUATION REPORT INCREMENT 11 Baseline (Reference SSCD XXXXXX, dated XX-XX-XX) LIST OF EFFECTIVE PAGES Month XX, XXXX The current status of all pages in this document is as shown below: Page Change No. SSCD No. Date i - ix Baseline XXXXXX Month XX, XXXX 1-1 Baseline XXXXXX Month XX, XXXX 2-1 - 2-2 Baseline XXXXXX Month XX, XXXX 3-1 - 3-3 Baseline XXXXXX Month XX, XXXX 4-1 - 4-15 Baseline XXXXXX Month XX, XXXX 5-1 - 5-10 Baseline XXXXXX Month XX, XXXX 6-1 - 6-4 Baseline XXXXXX Month XX, XXXX 7-1 - 7-61 Baseline XXXXXX Month XX, XXXX A-1 - A-9 Baseline XXXXXX Month XX, XXXX B-1 - B-3 Baseline XXXXXX Month XX, XXXX C-1 - C-2 Baseline XXXXXX Month XX, XXXX D-1 - D-92 Baseline XXXXXX Month XX, XXXX WWW.NASAWATCH.COM SSP 54311 Baseline - WWW.NASAWATCH.COM INTERNATIONAL SPACE STATION PROGRAM POST INCREMENT EVALUATION REPORT INCREMENT 11 JUNE 2006 i SSP 54311 Baseline - WWW.NASAWATCH.COM SSCB APPROVAL NOTICE INTERNATIONAL SPACE STATION PROGRAM POST INCREMENT EVALUATION REPORT INCREMENT 11 JUNE 2006 Michael T. -

Building and Maintaining the International Space Station (ISS)
/ Building and maintaining the International Space Station (ISS) is a very complex task. An international fleet of space vehicles launches ISS components; rotates crews; provides logistical support; and replenishes propellant, items for science experi- ments, and other necessary supplies and equipment. The Space Shuttle must be used to deliver most ISS modules and major components. All of these important deliveries sustain a constant supply line that is crucial to the development and maintenance of the International Space Station. The fleet is also responsible for returning experiment results to Earth and for removing trash and waste from the ISS. Currently, transport vehicles are launched from two sites on transportation logistics Earth. In the future, the number of launch sites will increase to four or more. Future plans also include new commercial trans- ports that will take over the role of U.S. ISS logistical support. INTERNATIONAL SPACE STATION GUIDE TRANSPORTATION/LOGISTICS 39 LAUNCH VEHICLES Soyuz Proton H-II Ariane Shuttle Roscosmos JAXA ESA NASA Russia Japan Europe United States Russia Japan EuRopE u.s. soyuz sL-4 proton sL-12 H-ii ariane 5 space shuttle First launch 1957 1965 1996 1996 1981 1963 (Soyuz variant) Launch site(s) Baikonur Baikonur Tanegashima Guiana Kennedy Space Center Cosmodrome Cosmodrome Space Center Space Center Launch performance 7,150 kg 20,000 kg 16,500 kg 18,000 kg 18,600 kg payload capacity (15,750 lb) (44,000 lb) (36,400 lb) (39,700 lb) (41,000 lb) 105,000 kg (230,000 lb), orbiter only Return performance -

International Space Station Basics Components of The
National Aeronautics and Space Administration International Space Station Basics The International Space Station (ISS) is the largest orbiting can see 16 sunrises and 16 sunsets each day! During the laboratory ever built. It is an international, technological, daylight periods, temperatures reach 200 ºC, while and political achievement. The five international partners temperatures during the night periods drop to -200 ºC. include the space agencies of the United States, Canada, The view of Earth from the ISS reveals part of the planet, Russia, Europe, and Japan. not the whole planet. In fact, astronauts can see much of the North American continent when they pass over the The first parts of the ISS were sent and assembled in orbit United States. To see pictures of Earth from the ISS, visit in 1998. Since the year 2000, the ISS has had crews living http://eol.jsc.nasa.gov/sseop/clickmap/. continuously on board. Building the ISS is like living in a house while constructing it at the same time. Building and sustaining the ISS requires 80 launches on several kinds of rockets over a 12-year period. The assembly of the ISS Components of the ISS will continue through 2010, when the Space Shuttle is retired from service. The components of the ISS include shapes like canisters, spheres, triangles, beams, and wide, flat panels. The When fully complete, the ISS will weigh about 420,000 modules are shaped like canisters and spheres. These are kilograms (925,000 pounds). This is equivalent to more areas where the astronauts live and work. On Earth, car- than 330 automobiles. -

A Call for a New Human Missions Cost Model
A Call For A New Human Missions Cost Model NASA 2019 Cost and Schedule Analysis Symposium NASA Johnson Space Center, August 13-15, 2019 Joseph Hamaker, PhD Christian Smart, PhD Galorath Human Missions Cost Model Advocates Dr. Joseph Hamaker Dr. Christian Smart Director, NASA and DoD Programs Chief Scientist • Former Director for Cost Analytics • Founding Director of the Cost and Parametric Estimating for the Analysis Division at NASA U.S. Missile Defense Agency Headquarters • Oversaw development of the • Originator of NASA’s NAFCOM NASA/Air Force Cost Model cost model, the NASA QuickCost (NAFCOM) Model, the NASA Cost Analysis • Provides subject matter expertise to Data Requirement and the NASA NASA Headquarters, DARPA, and ONCE database Space Development Agency • Recognized expert on parametrics 2 Agenda Historical human space projects Why consider a new Human Missions Cost Model Database for a Human Missions Cost Model • NASA has over 50 years of Human Space Missions experience • NASA’s International Partners have accomplished additional projects . • There are around 70 projects that can provide cost and schedule data • This talk will explore how that data might be assembled to form the basis for a Human Missions Cost Model WHY A NEW HUMAN MISSIONS COST MODEL? NASA’s Artemis Program plans to Artemis needs cost and schedule land humans on the moon by 2024 estimates Lots of projects: Lunar Gateway, Existing tools have some Orion, landers, SLS, commercially applicability but it seems obvious provided elements (which we may (to us) that a dedicated HMCM is want to independently estimate) needed Some of these elements have And this can be done—all we ongoing cost trajectories (e.g. -

Aeronautics and Space Report of the President
Aeronautics and Space Report of the President Fiscal Year 2009 Activities Aeronautics and Space Report of the President Fiscal Year 2009 Activities The National Aeronautics and Space Act of 1958 directed the annual Aeronautics and Space Report to include a “comprehensive description of the programmed activities and the accomplishments of all agencies of the United States in the field of aeronautics and space activities during the preceding calendar year.” In recent years, the reports have been prepared on a fiscal-year basis, consistent with the budgetary period now used in programs of the Federal Government. This year’s report covers Aeronautics and SpaceAeronautics Report of the President activities that took place from October 1, 2008, through September 30, 2009. TABLE OF CONTENTS National Aeronautics and Space Administration . 1. Fiscal Year 2009 Activities Year Fiscal • Exploration Systems Mission Directorate 1 • Space Operations Mission Directorate 10 • Science Mission Directorate 18 • Aeronautics Research Mission Directorate 25 Department of Defense . 41 Federal Aviation Administration . 45 . Department of Commerce . 51. Department of the Interior . 81. Federal Communications Commission . 103 U.S. Department of Agriculture. 107 National Science Foundation . 115 . Department of State. 125 Department of Energy. 129 Smithsonian Institution . 137. Appendices . 149 . • A-1 U S Government Spacecraft Record 150 • A-2 World Record of Space Launches Successful in Attaining Earth Orbit or Beyond 151 • B Successful Launches to Orbit on U S Vehicles 152 • C Human Spaceflights 155 • D-1A Space Activities of the U S Government—Historical Table of Budget Authority in Millions of Real-Year Dollars 156 • D-1B Space Activities of the U S Government—Historical Table of Budget Authority in Millions of Inflation-Adjusted FY 09 Dollars 157 • D-2 Federal Space Activities Budget 158 • D-3 Federal Aeronautics Activities Budget 159 Acronyms . -
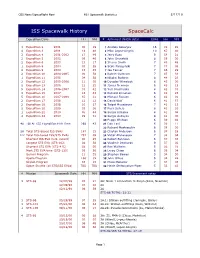
ISS Spacewalk History Spacecalc
CBS News/Spaceflight Now HST Spacewalk Statistics 8/17/10 ISS Spacewalk History SpaceCalc Expedition EVAs HH MM # Astronaut (NASA data) EVAs HH MM 1 Expedition 2 2001 00 19 1 Anatoly Solovyev 16 82 22 4 Expedition 3 2001 18 40 2 Mike Lopez-Alegria 10 67 40 3 Expedition 4 2001-2002 17 49 3 Jerry Ross 9 58 21 2 Expedition 5 2002 09 46 4 John Grunsfeld 8 58 30 2 Expedition 6 2003 13 17 5 Steven Smith 7 49 48 1 Expedition 8 2004 03 55 6 Scott Parazynski 7 47 05 4 Expedition 9 2004 15 45 7 Joe Tanner 7 46 29 2 Expedition 10 2004-2005 09 58 8 Robert Curbeam 7 45 33 1 Expedition 11 2005 04 58 9 Nikolai Budarin 8 44 25 2 Expedition 12 2005-2006 11 05 10 Douglas Wheelock 6 43 30 2 Expedition 13 2006 12 25 11 James Newman 6 43 13 5 Expedition 14 2006-2007 33 42 12 Yuri Onufrienko 8 42 33 3 Expedition 15 2007 18 43 13 Richard Linnehan 6 42 23 5 Expedition 16 2007-2008 35 21 14 Michael Fossum 6 42 01 2 Expedition 17 2008 12 12 15 David Wolf 6 41 57 2 Expedition 18 2008 10 27 16 Talgat Musabayev 7 41 13 2 Expedition 20 2009 05 06 17 Piers Sellers 6 41 10 1 Expedition 22 2010 05 44 18 Sergei Krikalev 8 41 08 4 Expedition 24 2010 29 31 19 Sergei Avdeyev 8 41 00 20 Peggy Whitson 6 39 46 48 TOTAL ISS Expedition EVA Time 269 43 21 Dan Tani 6 39 11 22 Richard Mastracchio 6 38 30 28 Total STS-based ISS EVAs 187 15 23 Clayton Anderson 6 38 28 122 Total ISS-based ISS/STS EVAs 757 09 24 Victor Afanaseyev 7 38 04 Shortest ISS EVA (U.S. -

Space Stations
Order Code IB93017 CRS Issue Brief for Congress Received through the CRS Web Space Stations Updated November 17, 2005 Marcia S. Smith Resources, Science, and Industry Division Congressional Research Service ˜ The Library of Congress CONTENTS SUMMARY MOST RECENT DEVELOPMENTS BACKGROUND AND ANALYSIS Introduction The Space Station Program: 1984-1993 Space Station Freedom 1993 Redesign — the Clinton Administration Restructuring The International Space Station (ISS): 1993-Present ISS Design, Cost, Schedule, and Lifetime September 1993-January 2001: The Clinton Administration 2001-Present: The George W. Bush Administration Reviews of NASA’s Cost Estimates and Adding Funds for ISS Congressional Action FY2005 FY2006 International Partners The Original Partners: Europe, Canada, and Japan Russia Risks and Benefits of Russian Participation ISS and U.S. Nonproliferation Objectives, Including the Iran Nonproliferation Act (INA) Key Issues For Congress Maintaining ISS Operations While the Shuttle Is Grounded Ensuring U.S. Astronaut Participation in Long-Duration Missions Impact of President Bush’s Vision for Space Exploration, Including a Potential Gap in U.S. Human Access to Space LEGISLATION IB93017 11-17-05 Space Stations SUMMARY Congress continues to debate NASA’s “Moon/Mars” Vision instead of the broadly- International Space Station (ISS), a perma- based program that was planned. nently occupied facility in Earth orbit where astronauts live and conduct research. Canada, Japan, and several European Congress appropriated approximately $35 countries became partners with NASA in billion for the program from FY1985-2005. building the space station in 1988; Russia The initial FY2006 ISS request was $2.180 joined in 1993. Except for money paid to billion: $1.857 billion for construction and Russia, there is no exchange of funds among operations and $324 million for research to be the partners. -

Eva-Exp-0031 Baseline
EVA-EXP-0031 BASELINE National Aeronautics and EFFECTIVE DATE: 04/18/2018 Space Administration EVA OFFICE EXTRAVEHICULAR ACTIVITY (EVA) AIRLOCKS AND ALTERNATIVE INGRESS/EGRESS METHODS DOCUMENT The electronic version is the official approved document. ECCN Notice: This document does not contain export controlled technical data. Revision: Baseline Document No: EVA-EXP-0031 Release Date: 04/18/2018 Page: 2 of 143 Title: EVA Airlocks and Alternative Ingress Egress Methods Document REVISION AND HISTORY PAGE Revision Change Description Release No. No. Date EVA-EXP-0031 Baseline Baseline per CR# EVA-CR-00031 04/18/2018 Document dated 03/07/2018 submitted and approved through DAA process/DAA # TN54054 approved April 9, 2018 EVA-REF-001 DAA Pre Baseline 03/12/2015 33134 Draft EVA-RD-002 05/14/2015 SAA 12/15/2015 DRAFT The electronic version is the official approved document. ECCN Notice: This document does not contain export controlled technical data. Revision: Baseline Document No: EVA-EXP-0031 Release Date: 04/18/2018 Page: 3 of 143 Title: EVA Airlocks and Alternative Ingress Egress Methods Document Executive Summary This document captures the currently perceived vehicle and EVA trades with high level definition of the capabilities and interfaces associated with performing an Extravehicular Activity (EVA) using an exploration EVA system and ingress/egress methods during future missions. Human spaceflight missions to Cislunar space, Mars transit, the moons of Mars (Phobos and Deimos), the Lunar surface, and the surface of Mars will include both microgravity and partial-gravity EVAs, and potential vehicles with which an exploration EVA system will need to interface. -

AXM ISS Russian Segment 1:100
AXM International Space Station 1:100 scale combo kit #3 (Russian Segment) Contents: ZARYA and Docking Target ZVEZDA Service Module PIRS (DC-1) POISK (MRM-2) RASSVET (MRM-1) 5 Debri panels for small diameter of Zvezda ©2013 Print on Cardstock (110 lbs) 1 cm KOMPAACT 2 Zarya 1 inch 1:100 Scale AKP BKA 1 BKA AKP om PMA CM 3 3 CM cut AKP-BKA cut Stb P Stb P y 3 4 1 TOP 2 B1 A1 FA OFB glue FA OFB glue PMA CMom FA OFB ©2011 Not for commercial use 1 cm Print on Cardstock (110 lbs) Zarya 1 inch 1:100 Scale A1 B1 T T T T 1 2 3 4 + PDGF EFGF TOP y R AP BKA 2AP BKA VSC L + PDGF EFGF Front R L M C C MCC FA OFB cut Aft Active hybrid docking mechanism Aft cut Passive docking mechanism (nadir) back + front + AC BKA + front inside front + of Zarya KOMPAACT 10 KOMPAACT AC BKA AC + back Front docking + KOMPAACT 11 KOMPAACT mechanism + + inside aft of Zarya cut 2ACO 1M BKA + + + 2AO BKA KA 140 + 1 2 3 back front ©2011 Not for commercial use 1 cm Print on Cardstock (90 lbs) Zarya solar panels 1 inch 1:100 Scale Folded configuration panels ©2011 Not for commercial use 1 cm Print on Cardstock (110 lbs) Zarya 1 inch inner 1:100 Scale outer outer Cut a cottonswab (37 mm of length and 2 mm of width) and inner use as a connector for the folded wing configuration outer outer inner Unity - Zarya connector ©2011 Not for commercial use 1 cm Print on Cardstock (90 lbs) 1 inch 1:100 Scale Docking Target for Zarya Module (Target used for Soyuz/Progress or MRM-1 “Rassvet”) Schematic for docking target location in Zarya: X Bottom view Left side view ©2011 Not for commercial