Simulation of a Robot Arm That Mimics the Angular Movement and Control of an Authentic Human Arm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Effect of Carbon Black Emitted from Gasoline Automobile on the Environment
International Journal of Advanced Research and Publications ISSN: 2456-9992 Effect Of Carbon Black Emitted From Gasoline Automobile On The Environment OKPARAKU, V. I., IGBOKWE, K. K., OGBUEHI, G. I. Uma Ukpai Polytechnic, Ohafia, Abia State, Nigeria, School of Science and Engineering Technology, [email protected] Abia State Polytechnic, Aba, Abia state, Nigeria, Department of Physics /Electronics, [email protected] Abia State University, Uturu, Abia State, Nigeria, Department of Industrial Chemistry, [email protected] Abstract: The research on effect of carbon black (CB) from gasoline automobile on the environment was carried out to determine the absorption rate of radiations by carbon black. In the experiment conducted in which two aluminum foils of same dimension (100cm x 100cm) were placed under sun with one foil covered with one gram (1g) of carbon black and the other foil uncovered with carbon black (kept uncovered). The specimens were allowed under the sun for total time of two hundred minutes (12000 seconds). Temperature changes of both foils were recorded in the interval of twenty minutes (1200 seconds) for some repeated readings. At the end of the experiment, results showed that the temperature change of foil covered with CB was higher (29.0 0C) than the temperature change of foil not covered with CB (28.0 0C). The difference in the temperature changes of both foils is in average of 1.0 0C. This is to say that carbon black emitted from gasoline automobile can be applied in the activities and practices that require radiation absorption. Keywords: Carbon Black, Effect, Environment, Radiations. 1. Introduction house gases (GHGs) and other carbonaceous by-products Carbon containing substances are the substances emitted absorb and hold radiations in the atmosphere and (compounds) that contain an atom (or atoms) of carbon the environment [6]. -
Backup of Pdf Book Page Making.Cdr
SOLUTION TO POVERTY AND UNEMPLOYEMNT IN NIGERIA (A case study of Akwa Ibom State) EKEMINI-ABASI ABRAHAM SOLUTION TO POVERTY AND UNEMPLOYMENT IN NIGERIA (A CASE STUDY OF AKWA IBOM STATE). Copyright ©2020 EKEMINI-ABASI ABRAHAM All right reserved: No part of this publicaon may be reproduced, stored in a retrieval system, or be transmied, in any form or by any means, mechanical, electronic, photocopying or otherwise without the prior wrien permission of the Author. However, brief excerpts in magazines, arcles, reviews, scholarly and spiritual quotes are permied. ISBN: 978-001-864-9 Published in Nigeria by: Eagle Skills Company (BN 2665483). For further informaon or permission, write: Email: [email protected] Phone No: 08146123942, 08025211127. Cover design by: Pigeet Express Ltd 09066855196 DEDICATION This book is dedicated to the Holy Spirit of God for the enablement and wisdom. I THE READERS GUIDE Everyone is expected to read and understand this secon before reading any part of this book as several misconcepons would be addressed. First and foremost, the researcher wishes that, everyone should be Liberal, empathec and compassionate. This wring has not passed through the standardized processes of veng. This was due to financial constraint. However, the ideas and findings are weighty and its worth spending me with. This research, advocate for an end to poverty and unemployment in Akwa Ibom State, and Nigeria at large. The wring is not targeted to subjugate any individual or group of persons. Hence, it shouldn't be used as weapon against governments, organizaons and individuals. Ensure you read this book thoroughly to the end before cricizing or drawing conclusion on any statement. -
Directory of Polling Units Abia State
FEDERAL REPUBLIC OF NIGERIA Independent National Electoral Commission (INEC) ABIA STATE DIRECTORY OF POLLING UNITS Revised January 2015 DISCLAIMER The contents of this Directory should not be referred to as a legal or administrative document for the purpose of administrative boundary or political claims. Any error of omission or inclusion found should be brought to the attention of the Independent National Electoral Commission. INEC Nigeria Directory of Polling Units Revised January 2015 Page i Table of Contents Pages Disclaimer................................................................................. i Table of Contents ………………………………………………… ii Foreword.................................................................................. iv Acknowledgement.................................................................... v Summary of Polling Units......................................................... 1 LOCAL GOVERNMENT AREAS Aba North ………………………………………………….. 2-15 Aba South …………………………………………………. 16-28 Arochukwu ………………………………………………… 29-36 Bende ……………………………………………………… 37-45 Ikwuano ……………………………………………………. 46-50 Isiala Ngwa North ………………………………………… 51-56 Isiala Ngwa South ………………………………………… 57-63 Isuikwuato …………………………………………………. 64-69 Obingwa …………………………………………………… 70-79 Ohafia ……………………………………………………… 80-91 Osisioma Ngwa …………………………………………… 92-95 Ugwunagbo ……………………………………………….. 96-101 Ukwa East …………………………………………………. 102-105 Ukwa West ………………………………………..………. 106-110 Umuahia North …………………………………..……….. 111-118 Umuahia South …………………………………..……….. 119-124 Umu-Nneochi -

Minister Presents Operational Licences to 65 TVET Institutions Prof
March - May, 2019 Vol. 4 No. 14 ISSN NO:2141-9590 Snippets on NBTE Board Chairman Minister Presents Operational Licences To 65 TVET Institutions Prof. Modupe Adelabu Executive Secretary Dr. Masa'udu A. Kazaure, mni NBTE Vision and Mission Vision To be a world class regulatory body for the promotion of Technical and Vocational Education and Training in Nigeria Mission To promote the production of skilled technical and professional manpower for the development and sustenance of the national economy Core Mandate To coordinate all aspects of Minister of State for Education, Prof Anthony Anwukah (arrowed) presenting operational licence to one of the Technical and Vocational Education newly approved institutions; on his immediate right is NBTE Governing Board Chairman Prof. Modupe Adelabu falling outside university education he Honourable Minister of based economy that is largely NBTE Statutes th Education, Mal. Adamu dependent on the skills of the · NBTE enabling Act No. 9 of 11 January, 1977 A d a m u h a s p r e s e n t e d workforce, noting also that TVET in operational licences to 65 Nigeria requires very urgent and · Education (National Minimum TTVET institutions comprising 18 Private decisive action to reposition it for Standard and Establishment of Polytechnics, two Private Monotechnics, the nation's technological take Institution Act No. 16 of August 1985 four Colleges of Health Science & off. and Act No. 9 of 1993 Technology, 33 Innovation Enterprise Mal. Adamu further stated that the Institutions (IEIs) and eight Vocational shortage of manpower across all No. of Institutions under NBTE Purview Enterprise Institutions (VEIs). -

GIVE FIRE BOOK Ll Startnow Channel
Give Me F re OR I Die Iyke Oriaku GIVE ME FIRE OR I DIE Copy right © IYKE ORIAKU 2018 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise without the prior permission of the copyright owner. ISBN 978-978-50822-5-8 Printed And Published By: Endtime Revival Altar (ERA) Publications I dedicate this book to my late parents, Rev D.U and Rev Lilian Oriaku whose legacy of fire we the ten children they left behind are still keeping till date. i I acknowledge all the men and women whom God has used to help me come this far. I am passionately grateful for all your gesture of fire. You shall not miss your reward. ii “Many people have read these messages you are about to read and God used the book to set their hearts ablaze. Today, they are burning for God. May that be your testimony also after reading this book, in Jesus Name, Amen!" Rev. Stanley Oriaku Grace Tabernacle, Benin Republic (Authors' Elder Brother) iii Contents Chapter 1 Please, correct me in love if you think I am lying against Late Arch Bishop Benson Idahosa. 1 Chapter 2 This is the 'name' of the man god Revealed that will take the mantle From Papa Uma Ukpai.” 4 Chapter 3 Before you start praying for Sponsor for your ministry, This is what to do. 7 Chapter 4 This is the message I 'Preached' and They said that I was insulting Bishop David Oyedepo. -

List of Schools
CHAPTER THREE S/N FEDERAL NAMES AND ADDRESSES OF POLYTECHNICS INSTITUTIONS (ABBREVIATION 3.0.00 LIST OF POLYTECHNICS AND MONOTECHNICS IN S) NIGERIA 6. FEDPO-BAU Federal Polytechnic, Bauchi, Listed in this Chapter are the Polytechnics and Monotechnics in P.M.B. 0231, Bauchi, Nigeria and obtainable Programmes. Candidates are strongly Bauchi State. advised to carefully study the requirements set out in this Chapter of this Brochure before selecting any of the Programmes. 7. FEDPO-BID Federal Polytechnic, Bida, P. M. B. 55, Bida, Niger State. Listed below are the names of Polytechnics in Nigeria. The Tel: 066-461707 abbreviations indicated against them are the ones used in this E-mail: [email protected] Brochure. 8. FP-CR Federal Polytechnic, Cross River State A. FEDERAL POLYTECHNICS S/N FEDERAL NAMES AND ADDRESSES OF 9. FEDPO-DAM Federal Polytechnic, POLYTECHNICS INSTITUTIONS P. M. B. 1006, Damaturu, (ABBREVIATION Yobe State. S) 10. FP-DAURA Federal Polytechnic, Daura, 1. AFIT Air Force Institute of Technology, Katsina State Nigerian Air Force, P.M.B. 2104, Mando, Kaduna Tel: 07029306014 11. FEDPO-EDE Federal Polytechnic, Ede, E-mail: [email protected] Osun State Web Site: www.afit.edu.ng 2. AUCHIPOLY Auchi Polytechnic, 12. FEDPO-EKO Federal Polytechnic, Ekowe, P. M. B. 13, P.M.B. 110, Auchi, Edo State. Yenagoa, Bayelsa State 13. FP-ENUGU Federal Polytechnic, 3. FEDPO-ADO Federal Polytechnic, Ado-Ekiti, Enugu State P. M. B. 5351, Ado-Ekiti, Ekiti State. 14. FP-GOMBE Federal Polytechnic, Kaltungo, Gombe State 4. FEDPO-AIU Akanu Ibiam Federal Polytechnic, Unwana, P.M.B. -
(Angular Velocities) of Simulated Automaton Arm of Five Joints and a Real Human Arm
International Journal of Latest Engineering and Management Research (IJLEMR) ISSN: 2455-4847 www.ijlemr.com || Volume 04 - Issue 12 || December 2019 || PP. 20-24 Aunthenticating the Motions (Angular Velocities) Of Simulated Automaton Arm of Five Joints and a Real Human Arm Stanley .O. Ikwunze1; Kingsley .K. Igbokwe2; Victor .I. Okparaku3 1Department of Electrical/Electronics, Abia State Polytechnic, Aba, Abia State, Nigeria 2Department of Physics/Electronics, Abia State Polytechnic, Aba, Abia State, Nigeria 3School of Science and Engineering Technology, Uma Ukpai Polytechnic, Ohafia, Abia State, Nigeria Abstract: This paper work is aimed to model and simulate an automaton arm using MATLAB in simulink software to accomplish the duplication of the automaton arm that behaves similarly with functionality and control of the reference human arm. The prime objective of building the automaton arm is to replicate capability of real human arm to achieving tasks by armless people in the society. The usual fundamental challenges such as ability to determine the basic characters of the automaton arm, evaluating the positioning in simulation, the model cost, production cost, robotic application and maintenance cost, and the suppleness of the manipulator (easiness to adjust or modify) were considered in the modeling, building and operating program of the automated robot arm. The objective of the research was attained by simulating already modeled automaton arm using MATLAB in software environment (simulink software). In the process of achieving the objective, an automaton arm was foremost modeled given a model name, ISO18E, and then the key trajectory parameter (angular velocity) of the automaton arm at all joints were simulated in line referencing the real human arm. -
Statistical Digest
STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST STASTTISTICALDIGESTATISTICALDIGESTSTSTATISTICALDIGESTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGESTSTATISTICALDIGEST -

19Th Edition 2017 Directory of Accredited TVET Institutions In
DIRECTORY OF ACCREDITED PROGRAMMES OFFERED IN POLYTECHNICS, TECHNICAL AND VOCATIONAL INSTITUTIONS IN NIGERIA 19th EDITION 2017 I Copyright © 2017 National Board for Technical Education, Plot B, Bida Road, PMB 2239, Kaduna. http://www.nbte.gov.ng E-mail: [email protected] Tel: +234 8035867245 All rights reserved: No part of this book may be reproduced in any form or by any means without prior written permission of the publisher, except brief quotes used specifically for academic discourses and publications: ISBN: 978-978-916-767-8 II NATIONAL BOARD FOR TECHNICAL EDUCATION VISION To be a world class regulatory body for the promotion of Technical and Vocational Education and Training (TVET) in Nigeria MISSION To promote the production of skilled technical & professional manpower for the development & sustenance of the national economy III Members of the Directory Review Committee 1. Dr. M. A. Kazaure, mni - Chairman 2. Engr. ADK Muhammad - Member 3. Mrs. Helen Oduntan - Member 4. Musa M. Isgogo - Member 5. Dr. Rufai Ibrahim - Member 6. Garba M. Nalado - Member 7. Hussaini H. Muhammad - Member 8. Mr Fidelis Ogbonna - Member 9. Samaila Tanko - Member 10. Aliyu M. Lemu - Member 11. Abdu Isa Kofarmata - Member 12. Abba M. Danmowa - Member 13. Mohammed Mustapha - Member 14. Engr. Dr. E.IE. Onyeocha - Member 15. Arc. Ngbede Ogoh - Member 16. Mohammed Jatau - Secretary I 17. Dan`Asabe Garba - Secretary II IV TABLE OF CONTENTS Page Cover page I Vision and Mission III Members of the Directory Review Committee IV Table of Contents V Foreword XIV Key -
Joint Admissions and Matriculation Board
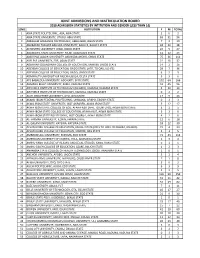
JOINT ADMISSIONS AND MATRICULATION BOARD MINIMUM SCORE SUBMITTED BY INSTITUTIONS DEGREE-AWARDING INSTITUTIONS Minimum S/N Name of Institution Score 1. PAN-ATLANTIC UNIVERSITY, AHMED ONIBUDO STREET, VICTORIA 210 ISLAND, LAGOS STATE 2. COVENANT UNIVERSITY, CANAAN LAND, OTA, OGUN STATE 200 3. OBAFEMI AWOLOWO UNIVERSITY, ILE-IFE, OSUN STATE 200 4. UNIVERSITY OF IBADAN, IBADAN, OYO STATE 200 5. SEMINARY OF ALL SAINTS, EKPOMA, EDO STATE. (AFFL TO UNIBEN, 200 BENIN) 6. UNIVERSITY OF BENIN, BENIN CITY, EDO STATE 200 7. BIGARD MEMORIAL SEMINARY, ENUGU. (AFFLIATED TO UNIVERSITY OF 200 IBADAN, OYO STATE) 8. UNIVERSITY OF LAGOS, LAGOS STATE 200 9. IMMANUEL COLLEGE OF THEOLOGY AND CHRISTIAN EDUC. IBADAN 200 (AFFL TO UNIV OF IBADAN) 10. ST. PETER AND PAUL SEMINARY BODIJA, IBADAN (AFFL TO UNIV OF 200 IBADAN), OYO STATE 11. LAGOS STATE UNIVERSITY, OJO, LAGOS STATE 190 12. NIGERIAN ARMY UNIVERSITY, BIU, BORNO STATE 180 13. EKITI STATE UNIVERSITY, ADO-EKITI, EKITI STATE 180 14. AFE BABALOLA UNIVERSITY, ADO-EKITI, EKITI STATE 180 15. BAPTIST COLLEGE OF THEOLOGY, BENIN CITY, EDO STATE (AFFL TO 180 AMBROSE ALLI UNIV) 16. ANCHOR UNIVERSITY, AYOBO, LAGOS STATE. 180 17. PAMO UNIVERSITY OF MEDICAL SCIENCE, PORT HARCOURT, RIVERS 180 STATE 18. REDEEMERS UNIVERSITY, OSUN STATE 180 19. LANDMARK UNIVERSITY, OMU-ARAN, KWARA STATE 180 20. ALEX EKWUEME FEDERAL UNIVERSITY, NDUFU-ALIKE, EBONYI STATE 180 21. UNIVERSITY OF ILORIN, ILORIN, KWARA STATE 180 22. UNIVERSITY OF JOS, JOS, PLATEAU STATE 180 Minimum S/N Name of Institution Score 23. FEDERAL UNIVERSITY, LOKOJA, KOGI STATE 180 24. UNIVERSITY OF ABUJA, ABUJA, FCT 180 25. -
Joint Admissions and Matriculation Board
JOINT ADMISSIONS AND MATRICULATION BOARD 2018 ADMISSION STATISTICS BY INTITUTION AND GENDER (LESS THAN 16) S/NO INSTITUTION F M TOTAL 1 ABIA STATE POLYTECHNIC, ABA, ABIA STATE 2 0 2 2 ABIA STATE UNIVERSITY, UTURU, ABIA STATE 63 31 94 3 ABRAHAM ADESANYA POLYTECHNIC, IJEBU-IGBO, OGUN STATE 7 3 10 4 ABUBAKAR TAFAWA BALEWA UNIVERSITY, BAUCHI, BAUCHI STATE 18 20 38 5 ACHIEVERS UNIVERSITY OWO, ONDO STATE 22 5 27 6 ADAMAWA STATE UNIVERSITY, MUBI, ADAMAWA STATE 12 12 24 7 ADEKUNLE AJASIN UNIVERSITY, AKUNGBA-AKOKO, ONDO STATE 75 36 111 8 ADELEKE UNIVERSITY, EDE, OSUN STATE 22 15 37 9 ADENIRAN OGUNSANYA COLLEGE OF EDUCATION, IJANIKIN, LAGOS STATE 14 2 16 10 ADEYEMI COLLEGE OF EDUCATION, ONDO STATE. (AFFL TO OAU, ILE-IFE) 29 7 36 11 ADEYEMI COLLEGE OF EDUCATION, ONDO, ONDO STATE 6 3 9 12 ADMIRALTY UNIVERSITYOF NIGERIA,IBUSA, DELTA STATE 3 3 6 13 AFE BABALOLA UNIVERSITY, ADO-EKITI, EKITI STATE 102 64 166 14 AHMADU BELLO UNIVERSITY, ZARIA, KADUNA STATE 51 45 96 15 AIR FORCE INSTITUTE OF TECHNOLOGY (DEGREE), KADUNA, KADUNA STATE 4 10 14 16 AIR FORCE INSTITUTE OF TECHNOLOGY, KADUNA, KADUNA STATE 0 2 2 17 AJAYI CROWTHER UNIVERSITY, OYO, OYO STATE 17 9 26 18 AKANU IBIAM FEDERAL POLYTECHNIC, UNWANA, AFIKPO, EBONYI STATE 0 3 3 19 AKWA IBOM STATE UNIVERSITY, IKOT-AKPADEN, AKWA IBOM STATE 5 12 17 20 AKWA IBOM STATE COLLEGE OF EDU, AFAHA-NSIT (AFFL TO UNI UYO), AKWA IBOM STATE 3 2 5 21 AKWA-IBOM STATE COLLEGE OF EDUCATION, AFAHA-NSIT, AKWA IBOM STATE 3 3 6 22 AKWA-IBOM STATE POLYTECHNIC, IKOT-OSURUA, AKWA IBOM STATE 4 2 6 23 AL- HIKMAH UNIVERSITY, ILORIN, -
Statistical Digest
TEACHERS REGISTRATION COUNCIL OF NIGERIA 2019-2020 Statistical Digest 1 Copyright © 2020 TRCN Teachers Registration Council of Nigeria 12, Oda Crescent, Off Aminu Kano Crescent Wuse II, P.M.B 526, Garki GPO Abuja. Statistical Digest ALL RIGHT RESERVED ISSN 1597-2135 2020 All enquiries should be directed to: The Registrar/Chief Executive Teachers Registration Council of Nigeria 12 Oda Crescent, Off Aminu Kano Crescent, Wuse II, P.M.B 526, Garki GPO, Abuja. Telephone: (234) 9-8762036 website: www.trcn.gov.ng E-mail: [email protected], [email protected], [email protected] 2 Mal. Adamu Adamu Honorable Minister of Education Federal Republic of Nigeria Prof. Adamu Baikie Prof. Josiah Olusegun Ajiboye Chairman, TRCN Governing Board Registrar/Chief Executive Federal Republic of Nigeria Teachers Registration Council of Nigeria 3 TABLE OF CONTENTS 1.0 FOREWORD 2.0 INTRODUCTION 2.1 Vision, Mission, and Motto of TRCN 2.2 TRCN Mandates and its Implications 2.3 TRCN Core Values 2.4 TRCN Programmes and Activities 2.5 Map of TRCN State Offices Nationwide 2.6 TRCN State Offices Guide 3.0 STATISTICAL DATA ON PQE, PQEI, AND PQED 4.0 STATISTICAL DATA OF TEACHERS IN PRIMARY SCHOOLS 5.0 STATISTICAL DATA OF TEACHERS IN SECONDARY SCHOOLS 6.0 STATISTICAL DATA OF TEACHERS IN TERTIARY INSTITUTIONS 7.0 STATISTICAL DATA OF TRCN REGISTERED MEMBERS IN ADMINISTRATIVE POSITIONS 8.0 STATISTICAL DATA OF LICENSED MEMBERS 9.0 STATISTICAL DATA OF INDUCTION CONDUCTED BY INSTITUTIONS 10.0 STATISTICAL DATA ON INSTITUTIONS ACCREDITATION STATUS 11.0 STATISTICS ON 1ST PHASE OF MONITORING FOR COMPLIANCE EXERCISE 12.0 NIGERIA TERTIARY INSTITUTIONS’ PROFILE 10.1 Nigerian Universities 10.2 Nigerian Polytechnics 10.3 Nigerian Colleges of Educations 13.0 CALL FOR PAPERS 4 Foreward On behalf of the Teachers Registration Council of Nigeria, I am pleased to present the 2019 edition of the Annual Statistical Digest.