Introduction to the Iapx 432 Architecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intel 8080 Datasheet
infel.. 8080A/8080A-1/8080A-2 8-BIT N-CHANNEL MICROPROCESSOR • TTL Drive Capability • Decimal, Binary, and Double Precision • 2,..,s (-1:1.3,..,s, -2:1.5 ,..,s) Instruction Arithmetic Cycle • Ability to Provide Priority Vectored • Powerful Problem Solving Instruction Interrupts Set • 512 Directly Addressed 110 Ports 6 General Purpose Registers and an Available In EXPRESS • Accumulator • - Standard Temperature Range 16-Blt Program Counter for Directly Available In 4Q-Lead Cerdlp and Plastic • Addressing up to 64K Bytes of Memory • Packages 16-Blt Stack Pointer and Stack (See Packaging Spec. Order #231369) • Manipulation Instructions for Rapid Switching of the Program Environment • The Intel 8080A is a complete 8-bit parallel central processing unit (CPU). It is fabricated on a single LSI chip using Intel's n-channel silicon gate MOS process. This offers the user a high performance solution to control and processing applications. The 8080A contains 6 8-bit general purpose working registers and an accumulator. The 6 general purpose registers may be addressed individually or in pairs providing both single and double precision operators. Arithmetic and logical instructions set or reset 4 testable flags. A fifth flag provides decimal arithmetic opera tion. The 8080A has an external stack feature wherein any portion of memory may be used as a last in/first out stack to store/retrieve the contents of the accumulator, flags, program counter, and all of the 6 general purpose registers. The 16-bit stack pointer controls the addressing of this external stack. This stack gives the 8080A the ability to easily handle multiple level priority interrupts by rapidly storing and restoring processor status. -

Over View of Microprocessor 8085 and Its Application
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 6, Ver. II (Nov - Dec .2015), PP 09-14 www.iosrjournals.org Over view of Microprocessor 8085 and its application Kimasha Borah Assistant Professor, Centre for Computer Studies Centre for Computer Studies, Dibrugarh University, Dibrugarh, Assam, India Abstract: Microprocessor is a program controlled semiconductor device (IC), which fetches, decode and executes instructions. It is versatile in application and is flexible to some extent. Nowadays, modern microprocessors can perform extremely sophisticated operations in areas such as meteorology, aviation, nuclear physics and engineering, and take up much less space as well as delivering superior performance Here is a brief review of microprocessor and its various application Key words: Semi Conductor, Integrated Circuits, CPU, NMOS ,PMOS, VLSI I. Introduction: Microprocessor is derived from two words micro and processor. Micro means small, tiny and processor means which processes something. It is a single Very Large Scale of Integration (VLSI) chip that incorporates all functions of central processing unit (CPU) fabricated on a single Integrated Circuits (ICs) (1).Some other units like caches, pipelining, floating point processing arithmetic and superscaling units are additionally present in the microprocessor and that results in increasing speed of operation.8085,8086,8088 are some examples of microprocessors(2). The technology used for microprocessor is N type metal oxide semiconductor(NMOS)(3). Basic operations of microprocessor are fetching instructions from memory ,decoding and executing them ie it takes data or operand from input device, perform arithmetic and logical operations and store results in required location or send result to output devices(1).Word size identifies the microprocessor.E.g. -

45-Year CPU Evolution: One Law and Two Equations
45-year CPU evolution: one law and two equations Daniel Etiemble LRI-CNRS University Paris Sud Orsay, France [email protected] Abstract— Moore’s law and two equations allow to explain the a) IC is the instruction count. main trends of CPU evolution since MOS technologies have been b) CPI is the clock cycles per instruction and IPC = 1/CPI is the used to implement microprocessors. Instruction count per clock cycle. c) Tc is the clock cycle time and F=1/Tc is the clock frequency. Keywords—Moore’s law, execution time, CM0S power dissipation. The Power dissipation of CMOS circuits is the second I. INTRODUCTION equation (2). CMOS power dissipation is decomposed into static and dynamic powers. For dynamic power, Vdd is the power A new era started when MOS technologies were used to supply, F is the clock frequency, ΣCi is the sum of gate and build microprocessors. After pMOS (Intel 4004 in 1971) and interconnection capacitances and α is the average percentage of nMOS (Intel 8080 in 1974), CMOS became quickly the leading switching capacitances: α is the activity factor of the overall technology, used by Intel since 1985 with 80386 CPU. circuit MOS technologies obey an empirical law, stated in 1965 and 2 Pd = Pdstatic + α x ΣCi x Vdd x F (2) known as Moore’s law: the number of transistors integrated on a chip doubles every N months. Fig. 1 presents the evolution for II. CONSEQUENCES OF MOORE LAW DRAM memories, processors (MPU) and three types of read- only memories [1]. The growth rate decreases with years, from A. -

Appendix D an Alternative to RISC: the Intel 80X86
D.1 Introduction D-2 D.2 80x86 Registers and Data Addressing Modes D-3 D.3 80x86 Integer Operations D-6 D.4 80x86 Floating-Point Operations D-10 D.5 80x86 Instruction Encoding D-12 D.6 Putting It All Together: Measurements of Instruction Set Usage D-14 D.7 Concluding Remarks D-20 D.8 Historical Perspective and References D-21 D An Alternative to RISC: The Intel 80x86 The x86 isn’t all that complex—it just doesn’t make a lot of sense. Mike Johnson Leader of 80x86 Design at AMD, Microprocessor Report (1994) © 2003 Elsevier Science (USA). All rights reserved. D-2 I Appendix D An Alternative to RISC: The Intel 80x86 D.1 Introduction MIPS was the vision of a single architect. The pieces of this architecture fit nicely together and the whole architecture can be described succinctly. Such is not the case of the 80x86: It is the product of several independent groups who evolved the architecture over 20 years, adding new features to the original instruction set as you might add clothing to a packed bag. Here are important 80x86 milestones: I 1978—The Intel 8086 architecture was announced as an assembly language– compatible extension of the then-successful Intel 8080, an 8-bit microproces- sor. The 8086 is a 16-bit architecture, with all internal registers 16 bits wide. Whereas the 8080 was a straightforward accumulator machine, the 8086 extended the architecture with additional registers. Because nearly every reg- ister has a dedicated use, the 8086 falls somewhere between an accumulator machine and a general-purpose register machine, and can fairly be called an extended accumulator machine. -

The Birth, Evolution and Future of Microprocessor
The Birth, Evolution and Future of Microprocessor Swetha Kogatam Computer Science Department San Jose State University San Jose, CA 95192 408-924-1000 [email protected] ABSTRACT timed sequence through the bus system to output devices such as The world's first microprocessor, the 4004, was co-developed by CRT Screens, networks, or printers. In some cases, the terms Busicom, a Japanese manufacturer of calculators, and Intel, a U.S. 'CPU' and 'microprocessor' are used interchangeably to denote the manufacturer of semiconductors. The basic architecture of 4004 same device. was developed in August 1969; a concrete plan for the 4004 The different ways in which microprocessors are categorized are: system was finalized in December 1969; and the first microprocessor was successfully developed in March 1971. a) CISC (Complex Instruction Set Computers) Microprocessors, which became the "technology to open up a new b) RISC (Reduced Instruction Set Computers) era," brought two outstanding impacts, "power of intelligence" and "power of computing". First, microprocessors opened up a new a) VLIW(Very Long Instruction Word Computers) "era of programming" through replacing with software, the b) Super scalar processors hardwired logic based on IC's of the former "era of logic". At the same time, microprocessors allowed young engineers access to "power of computing" for the creative development of personal 2. BIRTH OF THE MICROPROCESSOR computers and computer games, which in turn led to growth in the In 1970, Intel introduced the first dynamic RAM, which increased software industry, and paved the way to the development of high- IC memory by a factor of four. -

Class-Action Lawsuit
Case 3:20-cv-00863-SI Document 1 Filed 05/29/20 Page 1 of 279 Steve D. Larson, OSB No. 863540 Email: [email protected] Jennifer S. Wagner, OSB No. 024470 Email: [email protected] STOLL STOLL BERNE LOKTING & SHLACHTER P.C. 209 SW Oak Street, Suite 500 Portland, Oregon 97204 Telephone: (503) 227-1600 Attorneys for Plaintiffs [Additional Counsel Listed on Signature Page.] UNITED STATES DISTRICT COURT DISTRICT OF OREGON PORTLAND DIVISION BLUE PEAK HOSTING, LLC, PAMELA Case No. GREEN, TITI RICAFORT, MARGARITE SIMPSON, and MICHAEL NELSON, on behalf of CLASS ACTION ALLEGATION themselves and all others similarly situated, COMPLAINT Plaintiffs, DEMAND FOR JURY TRIAL v. INTEL CORPORATION, a Delaware corporation, Defendant. CLASS ACTION ALLEGATION COMPLAINT Case 3:20-cv-00863-SI Document 1 Filed 05/29/20 Page 2 of 279 Plaintiffs Blue Peak Hosting, LLC, Pamela Green, Titi Ricafort, Margarite Sampson, and Michael Nelson, individually and on behalf of the members of the Class defined below, allege the following against Defendant Intel Corporation (“Intel” or “the Company”), based upon personal knowledge with respect to themselves and on information and belief derived from, among other things, the investigation of counsel and review of public documents as to all other matters. INTRODUCTION 1. Despite Intel’s intentional concealment of specific design choices that it long knew rendered its central processing units (“CPUs” or “processors”) unsecure, it was only in January 2018 that it was first revealed to the public that Intel’s CPUs have significant security vulnerabilities that gave unauthorized program instructions access to protected data. 2. A CPU is the “brain” in every computer and mobile device and processes all of the essential applications, including the handling of confidential information such as passwords and encryption keys. -

A Simulator for the Intel 8086 Microprocessor
Rochester Institute of Technology RIT Scholar Works Theses 1988 A Simulator for the Intel 8086 microprocessor William A. Chapman Follow this and additional works at: https://scholarworks.rit.edu/theses Recommended Citation Chapman, William A., "A Simulator for the Intel 8086 microprocessor" (1988). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. A SIMULATOR FOR THE INTEL 8086 MICROPROCESSOR by William A. Chapman A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering Approved by: Professor Ken Hsu ':"(':":T~h":"e~sJ.';":·S=--=-A-d'=""v-i:-s-o-r-)------- Professor James R. Schueckler Professor _~~ _ Professor __~__:--:~-=- _ (Department Head) DEPARTMENT OF ELECTRICAL ENGINEERING COLLEGE OF ENGINEERING ROCHESTER INSTITUTE OF TECHNOLOGY ROCHESTER, NEW YORK MAY, 1988 Abstract This project was originally suggested by J. Schueckler as an aid to teaching students the Intel 8086 Assembly Language. The need for such a tool becomes apparent when one considers the expense of providing students with dedicated hardware that rapidly becomes obsolete, but a Simulator which could be easily updated and runs on a general purpose or timesharing computer system would be accessible to many students for a fraction of the cost. The intended use of the Simulator therefore dictated that it precisely model the hardware, be available on a multiuser system and run as efficiently as possible. -

Improving Learning of Programming Through E-Learning by Using Asynchronous Virtual Pair Programming
Improving Learning of Programming Through E-Learning by Using Asynchronous Virtual Pair Programming Abdullah Mohd ZIN Department of Industrial Computing Faculty of Information Science and Technology National University of Malaysia Bangi, MALAYSIA Sufian IDRIS Department of Computer Science Faculty of Information Science and Technology National University of Malaysia Bangi, MALAYSIA Nantha Kumar SUBRAMANIAM Open University Malaysia (OUM) Faculty of Information Technology and Multimedia Communication Kuala Lumpur, MALAYSIA ABSTRACT The problem of learning programming subjects, especially through distance learning and E-Learning, has been widely reported in literatures. Many attempts have been made to solve these problems. This has led to many new approaches in the techniques of learning of programming. One of the approaches that have been proposed is the use of virtual pair programming (VPP). Most of the studies about VPP in distance learning or e-learning environment focus on the use of the synchronous mode of collaboration between learners. Not much research have been done about asynchronous VPP. This paper describes how we have implemented VPP and a research that has been carried out to study the effectiveness of asynchronous VPP for learning of programming. In particular, this research study the effectiveness of asynchronous VPP in the learning of object-oriented programming among students at Open University Malaysia (OUM). The result of the research has shown that most of the learners have given positive feedback, indicating that they are happy with the use of asynchronous VPP. At the same time, learners did recommend some extra features that could be added in making asynchronous VPP more enjoyable. Keywords: Pair-programming; Virtual Pair-programming; Object Oriented Programming INTRODUCTION Delivering program of Information Technology through distance learning or E- Learning is indeed a very challenging task. -
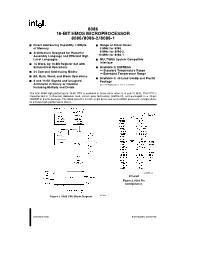
8086 16-Bit Hmos Microprocessor 8086/8086-2/8086-1
8086 16-BIT HMOS MICROPROCESSOR 8086/8086-2/8086-1 Y Direct Addressing Capability 1 MByte Y Range of Clock Rates: of Memory 5 MHz for 8086, 8 MHz for 8086-2, Y Architecture Designed for Powerful Assembly Language and Efficient High 10 MHz for 8086-1 Level Languages Y MULTIBUS System Compatible Interface Y 14 Word,by 16-Bit Register Set with Symmetrical Operations Y Available in EXPRESS –Standard Temperature Range Y 24 Operand Addressing Modes –Extended Temperature Range Y Bit,Byte,Word,and Block Operations Y Available in 40-Lead Cerdip and Plastic Y 8 and 16-Bit Signed and Unsigned Package Arithmetic in Binary or Decimal (See Packaging Spec.Order ›231369) Including Multiply and Divide The Intel 8086 high performance 16-bit CPU is available in three clock rates:5,8 and 10 MHz.The CPU is implemented in N-Channel,depletion load,silicon gate technology (HMOS-III),and packaged in a 40-pin CERDIP or plastic package.The 8086 operates in both single processor and multiple processor configurations to achieve high performance levels. 231455–2 40 Lead Figure 2.8086 Pin Configuration Figure 1.8086 CPU Block Diagram 231455–1 September 1990 Order Number:231455-005 8086 Table 1.Pin Description The following pin function descriptions are for 8086 systems in either minimum or maximum mode.The ‘‘Local Bus’’ in these descriptions is the direct multiplexed bus interface connection to the 8086 (without regard to additional bus buffers). Symbol Pin No.Type Name and Function AD15–AD0 2–16,39 I/O ADDRESS DATA BUS: These lines constitute the time multiplexed memory/IO address (T1),and data (T2,T3,TW,T4) bus.A0 is analogous to BHE for the lower byte of the data bus,pins D7–D0.It is LOW during T1 when a byte is to be transferred on the lower portion of the bus in memory or I/O operations.Eight-bit oriented devices tied to the lower half would normally use A0 to condition chip select functions.(See BHE.) These lines are active HIGH and float to 3-state OFF during interrupt acknowledge and local bus ‘‘hold acknowledge’’. -

The Joe-E Language Specification (Draft)
The Joe-E Language Specification (draft) Adrian Mettler David Wagner famettler,[email protected] February 3, 2008 Disclaimer: This is a draft version of the Joe-E specification, and is subject to change. Sections 5 - 7 mention some (but not all) of the aspects of the Joe-E language that are future work or current works in progress. 1 Introduction We describe the Joe-E language, a capability-based subset of Java intended to make it easier to build secure systems. The goal of object capability languages is to support the Principle of Least Authority (POLA), so that each object naturally receives the least privilege (i.e., least authority) needed to do its job. Thus, we hope that Joe-E will support secure programming while remaining familiar to Java programmers everywhere. 2 Goals We have several goals for the Joe-E language: • Be familiar to Java programmers. To minimize the barriers to adoption of Joe-E, the syntax and semantics of Joe-E should be familiar to Java programmers. We also want Joe-E programmers to be able to use all of their existing tools for editing, compiling, executing, debugging, profiling, and reasoning about Java code. We accomplish this by defining Joe-E as a subset of Java. In general: Subsetting Principle: Any valid Joe-E program should also be a valid Java program, with identical semantics. This preserves the semantics Java programmers will expect, which are critical to keeping the adoption costs manageable. Also, it means all of today's Java tools (IDEs, debuggers, profilers, static analyzers, theorem provers, etc.) will apply to Joe-E code. -

Professor Won Woo Ro, School of Electrical and Electronic Engineering Yonsei University the Intel® 4004 Microprocessor, Introdu
Professor Won Woo Ro, School of Electrical and Electronic Engineering Yonsei University The 1st Microprocessor The Intel® 4004 microprocessor, introduced in November 1971 An electronics revolution that changed our world. There were no customer‐ programmable microprocessors on the market before the 4004. It propelled software into the limelight as a key player in the world of digital electronics design. 4004 Microprocessor Display at New Intel Museum A Japanese calculator maker (Busicom) asked to design: A set of 12 custom logic chips for a line of programmable calculators. Marcian E. "Ted" Hoff Recognized the integrated circuit technology (of the day) had advanced enough to build a single chip, general purpose computer. Federico Faggin to turn Hoff's vision into a silicon reality. (In less than one year, Faggin and his team delivered the 4004, which was introduced in November, 1971.) The world's first microprocessor application was this Busicom calculator. (sold about 100,000 calculators.) Measuring 1/8 inch wide by 1/6 inch long, consisting of 2,300 transistors, Intel’s 4004 microprocessor had as much computing power as the first electronic computer, ENIAC. 2 inch 4004 and 12 inch Core™2 Duo wafer ENIAC, built in 1946, filled 3000‐cubic‐ feet of space and contained 18,000 vacuum tubes. The 4004 microprocessor could execute 60,000 operations per second Running frequency: 108 KHz Founders wanted to name their new company Moore Noyce. However the name sounds very much similar to “more noise”. "Only the paranoid survive". Moore received a B.S. degree in Chemistry from the University of California, Berkeley in 1950 and a Ph.D. -
A Compiler Target Model for Line Associative Registers
University of Kentucky UKnowledge Theses and Dissertations--Electrical and Computer Engineering Electrical and Computer Engineering 2019 A Compiler Target Model for Line Associative Registers Paul S. Eberhart University of Kentucky, [email protected] Digital Object Identifier: https://doi.org/10.13023/etd.2019.141 Right click to open a feedback form in a new tab to let us know how this document benefits ou.y Recommended Citation Eberhart, Paul S., "A Compiler Target Model for Line Associative Registers" (2019). Theses and Dissertations--Electrical and Computer Engineering. 138. https://uknowledge.uky.edu/ece_etds/138 This Master's Thesis is brought to you for free and open access by the Electrical and Computer Engineering at UKnowledge. It has been accepted for inclusion in Theses and Dissertations--Electrical and Computer Engineering by an authorized administrator of UKnowledge. For more information, please contact [email protected]. STUDENT AGREEMENT: I represent that my thesis or dissertation and abstract are my original work. Proper attribution has been given to all outside sources. I understand that I am solely responsible for obtaining any needed copyright permissions. I have obtained needed written permission statement(s) from the owner(s) of each third-party copyrighted matter to be included in my work, allowing electronic distribution (if such use is not permitted by the fair use doctrine) which will be submitted to UKnowledge as Additional File. I hereby grant to The University of Kentucky and its agents the irrevocable, non-exclusive, and royalty-free license to archive and make accessible my work in whole or in part in all forms of media, now or hereafter known.