Bounding the Search Space for Global Optimization of Neural Networks Learning Error: an Interval Analysis Approach
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Journal Abbreviations
Abbreviations of Names of Serials This list gives the form of references used in Mathematical Reviews (MR). not previously listed ⇤ The abbreviation is followed by the complete title, the place of publication journal indexed cover-to-cover § and other pertinent information. † monographic series Update date: July 1, 2016 4OR 4OR. A Quarterly Journal of Operations Research. Springer, Berlin. ISSN Acta Math. Hungar. Acta Mathematica Hungarica. Akad. Kiad´o,Budapest. § 1619-4500. ISSN 0236-5294. 29o Col´oq. Bras. Mat. 29o Col´oquio Brasileiro de Matem´atica. [29th Brazilian Acta Math. Sci. Ser. A Chin. Ed. Acta Mathematica Scientia. Series A. Shuxue † § Mathematics Colloquium] Inst. Nac. Mat. Pura Apl. (IMPA), Rio de Janeiro. Wuli Xuebao. Chinese Edition. Kexue Chubanshe (Science Press), Beijing. ISSN o o † 30 Col´oq. Bras. Mat. 30 Col´oquio Brasileiro de Matem´atica. [30th Brazilian 1003-3998. ⇤ Mathematics Colloquium] Inst. Nac. Mat. Pura Apl. (IMPA), Rio de Janeiro. Acta Math. Sci. Ser. B Engl. Ed. Acta Mathematica Scientia. Series B. English § Edition. Sci. Press Beijing, Beijing. ISSN 0252-9602. † Aastaraam. Eesti Mat. Selts Aastaraamat. Eesti Matemaatika Selts. [Annual. Estonian Mathematical Society] Eesti Mat. Selts, Tartu. ISSN 1406-4316. Acta Math. Sin. (Engl. Ser.) Acta Mathematica Sinica (English Series). § Springer, Berlin. ISSN 1439-8516. † Abel Symp. Abel Symposia. Springer, Heidelberg. ISSN 2193-2808. Abh. Akad. Wiss. G¨ottingen Neue Folge Abhandlungen der Akademie der Acta Math. Sinica (Chin. Ser.) Acta Mathematica Sinica. Chinese Series. † § Wissenschaften zu G¨ottingen. Neue Folge. [Papers of the Academy of Sciences Chinese Math. Soc., Acta Math. Sinica Ed. Comm., Beijing. ISSN 0583-1431. -

Reading List for Numerical Analysis Group D. Phil. Students MT 2013
Reading List for Numerical Analysis Group D. Phil. Students MT 2013 Each student should make a serious and continuing effort to familiarise himself/herself with the contents of several books from the following annotated list. The list is divided into subject areas and comments are given on the relative level and difficulty of each book. As a general rule, you should expect to study the most advanced books in the area of your dissertation together with a reasonable spread of books in related areas. A rough guide could be that you should be familiar with about a dozen books drawn from half a dozen of the listed areas. Journals Acta Numerica SIAM Review Journal of Computational Physics SIAM Journal on Numerical Analysis SIAM Journal on Matrix Analysis & Applications SIAM Journal on Scientific Computing SIAM Journal on Optimization BIT Numerical Mathematics Numerische Mathematik IMA Journal of Numerical Analysis Mathematics of Computation Foundations of Computational Mathematics Mathematical Programming Mathematical Programming Computation Floating point arithmetic M.L. Overton: Numerical Computing with IEEE Floating Point Arithmetic , SIAM, 2001. [Very readable and systematic presentation.] See also Chaps. 1 and 2 of the book by N.J. Higham listed below. Numerical linear algebra J.W. Demmel: Applied Numerical Linear Algebra, SIAM, 1997. [Best source on recent algorithms such as divide-and-conquer.] H.C. Elman, D.J. Silvester, A.J. Wathen: Finite Elements And Fast Iterative Solvers, Oxford University Press, 2005. [Major book at the interface of finite elements and matrix iterations.] G.H. Golub & C.F. Van Loan: Matrix Computations , Johns Hopkins, 4th ed. 2012. -

RESOURCES in NUMERICAL ANALYSIS Kendall E
RESOURCES IN NUMERICAL ANALYSIS Kendall E. Atkinson University of Iowa Introduction I. General Numerical Analysis A. Introductory Sources B. Advanced Introductory Texts with Broad Coverage C. Books With a Sampling of Introductory Topics D. Major Journals and Serial Publications 1. General Surveys 2. Leading journals with a general coverage in numerical analysis. 3. Other journals with a general coverage in numerical analysis. E. Other Printed Resources F. Online Resources II. Numerical Linear Algebra, Nonlinear Algebra, and Optimization A. Numerical Linear Algebra 1. General references 2. Eigenvalue problems 3. Iterative methods 4. Applications on parallel and vector computers 5. Over-determined linear systems. B. Numerical Solution of Nonlinear Systems 1. Single equations 2. Multivariate problems C. Optimization III. Approximation Theory A. Approximation of Functions 1. General references 2. Algorithms and software 3. Special topics 4. Multivariate approximation theory 5. Wavelets B. Interpolation Theory 1. Multivariable interpolation 2. Spline functions C. Numerical Integration and Differentiation 1. General references 2. Multivariate numerical integration IV. Solving Differential and Integral Equations A. Ordinary Differential Equations B. Partial Differential Equations C. Integral Equations V. Miscellaneous Important References VI. History of Numerical Analysis INTRODUCTION Numerical analysis is the area of mathematics and computer science that creates, analyzes, and implements algorithms for solving numerically the problems of continuous mathematics. Such problems originate generally from real-world applications of algebra, geometry, and calculus, and they involve variables that vary continuously; these problems occur throughout the natural sciences, social sciences, engineering, medicine, and business. During the second half of the twentieth century and continuing up to the present day, digital computers have grown in power and availability. -

Modeling and Computation of Liquid Crystals
Acta Numerica (2022), pp. 1{89 © Cambridge University Press, 2022 doi:10.1017/S09624929XXXXXX Printed in the United Kingdom Modeling and Computation of Liquid Crystals Wei Wang Department of Mathematics, Zhejiang University, Hangzhou 310027, China [email protected] Lei Zhang Beijing International Center for Mathematical Research, Center for Quantitative Biology, Peking University, Beijing 100871, China [email protected] Pingwen Zhang School of Mathematical Sciences, Peking University, Beijing 100871, China [email protected] Liquid crystal is a typical kind of soft matter that is intermediate between crystalline solids and isotropic fluids. The study of liquid crystals has made tremendous progress over the last four decades, which is of great importance on both fundamental scientific researches and widespread applications in in- dustry. In this paper, we review the mathematical models and their connec- tions of liquid crystals, and survey the developments of numerical methods for finding the rich configurations of liquid crystals. CONTENTS 1 Introduction 2 2 Mathematical models of liquid crystals 6 arXiv:2104.02250v1 [math.NA] 6 Apr 2021 3 Mathematical analysis for different liquid crystal models 26 4 Numerical methods for computing stable defects of liquid crystals 38 5 Numerical methods for computing liquid crystal hydrodynamics 51 6 Numerical methods for computing transition pathways and solution landscape of liquid crystals 58 7 Conclusion and future directions 69 8 Appendix 74 References 76 2 Acta Numerica 1. Introduction Liquid crystals (LCs) are classical examples of partially ordered materi- als that translate freely as liquid and exhibit some long-range order above a critical concentration or below a critical temperature. -

Journal Abbreviations
Abbreviations of Names of Serials This list gives the form of references used in Mathematical Reviews (MR). ∗ not previously listed E available electronically The abbreviation is followed by the complete title, the place of publication § journal reviewed cover-to-cover V videocassette series and other pertinent information. † monographic series ¶ bibliographic journal 4OR 4OR. Quarterly Journal of the Belgian, French and Italian Operations Research § E Acta Math. Appl. Sin. Engl. Ser. Acta Mathematicae Applicatae Sinica. English Series. Societies. Springer, Berlin. ISSN 1619-4500. Springer, Heidelberg. ISSN 0168-9673. ∗†19o Col´oq. Bras. Mat. 19o Col´oquio Brasileiro de Matem´atica. [19th Brazilian § E Acta Math. Hungar. Acta Mathematica Hungarica. Akad. Kiad´o, Budapest. ISSN Mathematics Colloquium] Inst. Mat. Pura Apl. (IMPA), Rio de Janeiro. 0236-5294. † 24o Col´oq. Bras. Mat. 24o Col´oquio Brasileiro de Matem´atica. [24th Brazilian §Acta Math. Inform. Univ. Ostraviensis Acta Mathematica et Informatica Universitatis Mathematics Colloquium] Inst. Mat. Pura Apl. (IMPA), Rio de Janeiro. Ostraviensis. Univ. Ostrava, Ostrava. ISSN 1211-4774. ∗†25o Col´oq. Bras. Mat. 25o Col´oquio Brasileiro de Matem´atica. [25th Brazilian §Acta Math. Sci. Ser. A Chin. Ed. Acta Mathematica Scientia. Series A. Shuxue Wuli Mathematics Colloquium] Inst. Nac. Mat. Pura Apl. (IMPA), Rio de Janeiro. Xuebao. Chinese Edition. Kexue Chubanshe (Science Press), Beijing. (See also Acta † Aastaraam. Eesti Mat. Selts Aastaraamat. Eesti Matemaatika Selts. [Annual. Estonian Math.Sci.Ser.BEngl.Ed.) ISSN 1003-3998. Mathematical Society] Eesti Mat. Selts, Tartu. ISSN 1406-4316. §ActaMath.Sci.Ser.BEngl.Ed. Acta Mathematica Scientia. Series B. English Edition. † Abh. Akad. Wiss. G¨ottingen. -
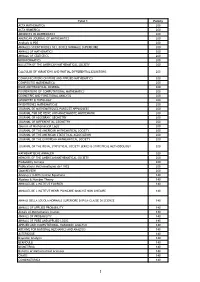
List of Mathematics Impact Factor Journals Indexed in ISI Web of Science (JCR SCI, 2016)
List of Mathematics Impact Factor Journals Indexed in ISI Web of Science (JCR SCI, 2016) Compiled by: Arslan Sheikh In Charge Reference & Research Section Library Information Services COMSATS Institute of Information Technology Park Road, Islamabad-Pakistan. Cell No +92-0321-9423071 [email protected] Rank Journal Title ISSN Impact Factor 1 ACTA NUMERICA 0962-4929 6.250 2 SIAM REVIEW 0036-1445 4.897 3 JOURNAL OF THE AMERICAN MATHEMATICAL SOCIETY 0894-0347 4.692 4 Nonlinear Analysis-Hybrid Systems 1751-570X 3.963 5 ANNALS OF MATHEMATICS 0003-486X 3.921 6 COMMUNICATIONS ON PURE AND APPLIED MATHEMATICS 0010-3640 3.793 7 INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROL 1049-8923 3.393 8 ACM TRANSACTIONS ON MATHEMATICAL SOFTWARE 0098-3500 3.275 9 Publications Mathematiques de l IHES 0073-8301 3.182 10 INVENTIONES MATHEMATICAE 0020-9910 2.946 11 MATHEMATICAL MODELS & METHODS IN APPLIED SCIENCES 0218-2025 2.860 12 Advances in Nonlinear Analysis 2191-9496 2.844 13 FOUNDATIONS OF COMPUTATIONAL MATHEMATICS 1615-3375 2.829 14 Communications in Nonlinear Science and Numerical Simulation 1007-5704 2.784 15 FUZZY SETS AND SYSTEMS 0165-0114 2.718 16 APPLIED AND COMPUTATIONAL HARMONIC ANALYSIS 1063-5203 2.634 17 SIAM Journal on Imaging Sciences 1936-4954 2.485 18 ANNALES DE L INSTITUT HENRI POINCARE-ANALYSE NON LINEAIRE 0294-1449 2.450 19 ACTA MATHEMATICA 0001-5962 2.448 20 MATHEMATICAL PROGRAMMING 0025-5610 2.446 21 ARCHIVE FOR RATIONAL MECHANICS AND ANALYSIS 0003-9527 2.392 22 CHAOS 1054-1500 2.283 23 APPLIED MATHEMATICS LETTERS 0893-9659 -

Abbreviations of Names of Serials
Abbreviations of Names of Serials This list gives the form of references used in Mathematical Reviews (MR). ∗ not previously listed The abbreviation is followed by the complete title, the place of publication x journal indexed cover-to-cover and other pertinent information. y monographic series Update date: January 30, 2018 4OR 4OR. A Quarterly Journal of Operations Research. Springer, Berlin. ISSN xActa Math. Appl. Sin. Engl. Ser. Acta Mathematicae Applicatae Sinica. English 1619-4500. Series. Springer, Heidelberg. ISSN 0168-9673. y 30o Col´oq.Bras. Mat. 30o Col´oquioBrasileiro de Matem´atica. [30th Brazilian xActa Math. Hungar. Acta Mathematica Hungarica. Akad. Kiad´o,Budapest. Mathematics Colloquium] Inst. Nac. Mat. Pura Apl. (IMPA), Rio de Janeiro. ISSN 0236-5294. y Aastaraam. Eesti Mat. Selts Aastaraamat. Eesti Matemaatika Selts. [Annual. xActa Math. Sci. Ser. A Chin. Ed. Acta Mathematica Scientia. Series A. Shuxue Estonian Mathematical Society] Eesti Mat. Selts, Tartu. ISSN 1406-4316. Wuli Xuebao. Chinese Edition. Kexue Chubanshe (Science Press), Beijing. ISSN y Abel Symp. Abel Symposia. Springer, Heidelberg. ISSN 2193-2808. 1003-3998. y Abh. Akad. Wiss. G¨ottingenNeue Folge Abhandlungen der Akademie der xActa Math. Sci. Ser. B Engl. Ed. Acta Mathematica Scientia. Series B. English Wissenschaften zu G¨ottingen.Neue Folge. [Papers of the Academy of Sciences Edition. Sci. Press Beijing, Beijing. ISSN 0252-9602. in G¨ottingen.New Series] De Gruyter/Akademie Forschung, Berlin. ISSN 0930- xActa Math. Sin. (Engl. Ser.) Acta Mathematica Sinica (English Series). 4304. Springer, Berlin. ISSN 1439-8516. y Abh. Akad. Wiss. Hamburg Abhandlungen der Akademie der Wissenschaften xActa Math. Sinica (Chin. Ser.) Acta Mathematica Sinica. -

D.B. Szyld Intro. to Numerical Alanalysis 22 October 2020 MATH 5043
D.B. Szyld Intro. to Numerical AlAnalysis 22 October 2020 MATH 5043 Literature Search Proposal expected on or before Tuesday 3 November. Report due on Thursday 12 November 2020, 5:00 p.m. You are requested to search in the literature for recent articles on any of the following topics: Floating point arithmetic, backward error analysis, interpolation, integration, solution of nonlinear equations (in particular variants of inexact Newton). You are expected to write a short report on the papers you find. I am asking you to read more than one paper. For example, two different approaches to the same problem, or three similar approaches by different authors. Choosing papers in the book reference list is discouraged. I would like to have a short proposal, listing the topic and the bibliography in 10 days or less. Then, you would write your short report, of say, three to five pages. Papers should be typed (LaTex is preferable). You should make a good effort to have a clear exposition of your ideas. Please, be critical, do not just copy what you read; in fact you are encouraged to discard some of the ideas if you find them inappropriate, or simply not great. Please explain your criteria and judgment. You will need to do some library work. A search such as the one I am propos- ing usually starts by looking at Mathematical Reviews, Computer Abstracts, or similar publications which list and reviews papers in a variety of journals. (Math. Rev. is available on line at http://www.ams.org/mathscinet or from the Temple Libraries Databases: https://guides.temple.edu/az.php). -

USER GUIDE Globsol User Guide
Vol. 00, No. 00, Month 200x, 1–21 USER GUIDE GlobSol User Guide R. Baker Kearfott, Department of Mathematics, University of Louisiana, U.L. Box 4-1010, Lafayette, Louisiana, 70504-1010, USA ([email protected]). (Received 00 Month 200x; in final form 00 Month 200x) We explain installation and use of the GlobSol package for mathematically rigorous bounds on all solutions to constrained and unconstrained global optimization problems, as well as non- linear systems of equations. This document should be of use both to people with optimization problems to solve and to people incorporating GlobSol’s components into other systems or providing interfaces to GlobSol. Keywords: nonconvex optimization; global optimization; GlobSol; constraint propagation 2000 AMS Subject Classifications: 90C30; 65K05; 90C26; 65G20 1. Introduction and Purpose GlobSol is an open-source, self-contained package for finding validated solutions to unconstrained and constrained global optimization problems, and for finding rigorous enclosures to all solutions to systems of nonlinear equations. GlobSol is distributed under the Boost license [3]. GlobSol uses a branch and bound algo- rithm for this purpose. Thus, the structure of GlobSol’s underlying algorithm is somewhat similar to that of many optimization packages, such as BARON [18]. However, GlobSol’s goal is to provide rigorous bounds on all possible solutions. That is, GlobSol’s output consists of lists of small intervals or interval vectors within which GlobSol has proven with the rigor of a mathematical proof that any possible solutions of the problem posed must lie1. (This is done by careful design of algorithms and use of directed rounding.) GlobSol is thus well-suited to solv- ing problems in which such bounds and guarantees are desired or important; for problems where such guarantees are not necessary, other software may solve the problems more efficiently, or may solve a wider range of problems. -

Listado De Revistas 2018 Revista Nombre Completo Clasificacion 1 Abstr
LISTADO DE REVISTAS 2018 REVISTA NOMBRE COMPLETO CLASIFICACION 1 ABSTR. APPL. ANAL. ABSTRACT AND APPLIED ANALYSIS R 2 ACTA APPL. MATH. ACTA APPLICANDAE MATHEMATICAE B 3 ACTA ARITH. ACTA ARITHMETICA B 4 ACTA MATH. ACTA MATHEMATICA MB 5 ACTA MATH. HUNGAR. ACTA MATHEMATICA HUNGARICA R 6 ACTA MATH. SCI. SER. B ENGL. ED. ACTA MATHEMATICA SCIENTIA. SERIES B. ENGLISH EDITION R 7 ACTA MATH. SIN. (ENGL. SER.) ACTA MATHEMATICA SINICA (ENGLISH SERIES) R 8 ACTA NUMER. ACTA NUMERICA MB 9 ADV. MODEL. OPTIM. ADVANCED MODELING AND OPTIMIZATION R 10 ADV. NONLINEAR STUD. ADVANCED NONLINEAR STUDIES B 11 ADV. APPL. CLIFFORD ALGEBR. ADVANCES IN APPLIED CLIFFORD ALGEBRAS R 12 ADV. IN APPL. MATH. ADVANCES IN APPLIED MATHEMATICS B 13 AAMM ADVANCES IN APPLIED MATHEMATICS AND MECHANICS R 14 ADV. IN APPL. PROBAB. ADVANCES IN APPLIED PROBABILITY B 15 ADV. IN CALCULUS OF VARIATIONS ADVANCES IN CALCULUS OF VARIATIONS B 16 ADV COMPUT MATH ADVANCES IN COMPUTATIONAL MATHEMATICS B 17 ADV. DIFFERENCE EQU. ADVANCES IN DIFFERENCE EQUATIONS R 18 ADV. DIFFERENTIAL EQUATIONS ADVANCES IN DIFFERENTIAL EQUATIONS B 19 ADV. GEOM. ADVANCES IN GEOMETRY B 20 ADV. MATH. SCI. APPL. ADVANCES IN MATHEMATICAL SCIENCES AND APPLICATIONS R 21 ADV. MATH. ADVANCES IN MATHEMATICS MB 22 ADVANCES IN PURE MATHEMATICS ADVANCES IN PURE MATHEMATICS R 23 AEQUATIONES MATH. AEQUATIONES MATHEMATICAE R ALEA LAT. AM. J. PROBAB. MATH. 24 ALEA. LATIN AMERICAN JOURNAL OF PROBABILITY AND MATHEMATICAL STATISTICS B STAT. 25 ALGEBR NUMBER THEORY ALGEBRA AND NUMBER THEORY MB 26 ALGEBRA COLLOQ. ALGEBRA COLLOQUIUM B 27 ALGEBRA UNIVERSALIS ALGEBRA UNIVERSALIS B 28 ALGEBR. GEOM. TOPOL. -

Preconditioning of Taylor Models, Implementation and Test Cases
NOLTA, IEICE Invited Paper Preconditioning of Taylor models, implementation and test cases Florian B¨unger 1 a) 1 Institute for Reliable Computing, Hamburg University of Technology Am Schwarzenberg-Campus 3, D-21073 Hamburg, Germany a) fl[email protected] Received January 14, 2020; Revised April 3, 2020; Published January 1, 2021 Abstract: Makino and Berz introduced the Taylor model approach for validated integration of initial value problems (IVPs) for ordinary differential equations (ODEs). Especially, they invented preconditioning of Taylor models for stabilizing the integration and proposed the following different types: parallelepiped preconditioning (with and without blunting), QR pre- conditioning, and curvilinear preconditioning. We review these types of preconditioning and show how they are implemented in INTLAB’s verified ODE solver verifyode by stating explicit MATLAB code. Finally, we test our implementation with several examples. Key Words: ordinary differential equations, initial value problems, Taylor models, QR pre- conditioning, curvilinear preconditioning, parallelepiped preconditioning, blunting 1. Introduction Preconditioning is a general concept in large parts of numerical mathematics. It is also widely used in the area of reliable (verified) computing in which numerical results are calculated along with rigorous error bounds that cover all numerical as well as all rounding errors of a computer, meaning that a mathematically exact result is proved to be contained within these rigorous bounds. For verified integration of initial value problems (IVPs) for ordinary differential equations (ODEs) preconditioning goes back to Lohner’s fundamental research [20] in which he particularly introduced his famous parallelepiped and QR methods to reduce the well-known wrapping effect from which naive verified integration methods for IVPs necessarily suffer. -
Tytuł 1 Punkty ACTA MATHEMATICA 200 ACTA NUMERICA 200
Tytuł 1 Punkty ACTA MATHEMATICA 200 ACTA NUMERICA 200 ADVANCES IN MATHEMATICS 200 AMERICAN JOURNAL OF MATHEMATICS 200 Analysis & PDE 200 ANNALES SCIENTIFIQUES DE L ECOLE NORMALE SUPERIEURE 200 ANNALS OF MATHEMATICS 200 ANNALS OF STATISTICS 200 BIOINFORMATICS 200 BULLETIN OF THE AMERICAN MATHEMATICAL SOCIETY 200 CALCULUS OF VARIATIONS AND PARTIAL DIFFERENTIAL EQUATIONS 200 COMMUNICATIONS ON PURE AND APPLIED MATHEMATICS 200 COMPOSITIO MATHEMATICA 200 DUKE MATHEMATICAL JOURNAL 200 FOUNDATIONS OF COMPUTATIONAL MATHEMATICS 200 GEOMETRIC AND FUNCTIONAL ANALYSIS 200 GEOMETRY & TOPOLOGY 200 INVENTIONES MATHEMATICAE 200 JOURNAL DE MATHEMATIQUES PURES ET APPLIQUEES 200 JOURNAL FUR DIE REINE UND ANGEWANDTE MATHEMATIK 200 JOURNAL OF ALGEBRAIC GEOMETRY 200 JOURNAL OF DIFFERENTIAL GEOMETRY 200 Journal of Mathematical Logic 200 JOURNAL OF THE AMERICAN MATHEMATICAL SOCIETY 200 JOURNAL OF THE AMERICAN STATISTICAL ASSOCIATION 200 JOURNAL OF THE EUROPEAN MATHEMATICAL SOCIETY 200 JOURNAL OF THE ROYAL STATISTICAL SOCIETY SERIES B-STATISTICAL METHODOLOGY 200 MATHEMATISCHE ANNALEN 200 MEMOIRS OF THE AMERICAN MATHEMATICAL SOCIETY 200 Probability Surveys 200 Publications Mathematiques de l IHES 200 SIAM REVIEW 200 Advances in Differential Equations 140 Algebra & Number Theory 140 ANNALES DE L INSTITUT FOURIER 140 ANNALES DE L INSTITUT HENRI POINCARE-ANALYSE NON LINEAIRE 140 ANNALI DELLA SCUOLA NORMALE SUPERIORE DI PISA-CLASSE DI SCIENZE 140 ANNALS OF APPLIED PROBABILITY 140 Annals of Mathematics Studies 140 ANNALS OF PROBABILITY 140 ANNALS OF PURE AND APPLIED