Siegwart Nourbakhsh
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Upgrading a Legacy Outdoors Robotic Vehicle4
Upgrading a Legacy Outdoors Robotic Vehicle4 1 1 2 Theodosis Ntegiannakis , Odysseas Mavromatakis , Savvas Piperidis , and Nikos C. Tsourveloudis3 1 Theodosis Ntegiannakis and Odysseas Mavromatakis are graduate students at the School of Production Engineering and Management, Technical University of Crete, Hellas. 2 corresponding author: Intelligent Systems and Robotics Laboratory, School of Production Engineering and Management, Technical University of Crete, 73100 Chania, Hellas, [email protected], www.robolab.tuc.gr 3 School of Production Engineering and Management, Technical University of Crete, Hellas, [email protected], www.robolab.tuc.gr Abstract. ATRV-mini was a popular, 2000's commercially available, outdoors robot. The successful upgrade procedure of a decommissioned ATRV-mini is presented in this paper. Its robust chassis construction, skid steering ability, and optional wifi connectivity were the major rea- sons for its commercial success, mainly for educational and research pur- poses. However the advances in electronics, microcontrollers and software during the last decades were not followed by the robot's manufacturer. As a result, the robot became obsolete and practically useless despite its good characteristics. The upgrade used up to date, off the shelf compo- nents and open source software tools. There was a major enhancement at robot's processing power, energy consumption, weight and autonomy time. Experimental testing proved the upgraded robot's operational in- tegrity and capability of undertaking educational, research and other typical robotic tasks. Keywords: all terrain autonomous robotic vehicle, educational robotics, ROS, robot upgrade, solar panels. 1 Introduction This work deals with the upgrading procedure of a decommissioned Real World Interface (RWI) ATRV-mini all-terrain robotic vehicle. -

The Steam Locomotive Table, V1
The Steam Locomotive Table, v1 If you’re reading this; you either like steam trains, or want to know more about them. Hopefully, either way, I can scratch your itch with this; a set of randomizer/dice-roll tables of my own making; as inspired by some similar tables for tanks and aircrafts. Bear with me, I know not everyone knows the things I do, and I sure know I don’t know a lot of things other train enthusiasts do; but hopefully the descriptions and examples will be enough to get anyone through this smoothly. To begin, you’ll either want a bunch of dice or any online dice-rolling/number generating site (or just pick at your own whim); and somewhere or something to keep track of the details. These tables will give details of a presumed (roughly) standard steam locomotive. No sentinels or other engines with vertical boilers; no climax, shay, etc specially driven locomotives; are considered for this listing as they can change many of the fundamental details of an engine. Go in expecting to make the likes of mainline, branchline, dockyard, etc engines; not the likes of experiments like Bulleid’s Leader or specific industry engines like the aforementioned logging shays. Some dice rolls will have uneven distribution, such as “1-4, and 5-6”. Typically this means that the less likely detail is also one that is/was significantly less common in real life, or significantly more complex to depict. For clarity sake examples will be linked, but you’re always encouraged to look up more as you would like or feel necessary. -

O-Steam-Price-List-Mar2017.Pdf
Part # Description Package Price ======== ================================================== ========= ========== O SCALE STEAM CATALOG PARTS LIST 2 Springs, driver leaf........................ Pkg. 2 $6.25 3 Floor, cab and wood grained deck............. Ea. $14.50 4 Beam, end, front pilot w/coupler pocket...... Ea. $8.00 5 Beam, end, rear pilot w/carry iron.......... Ea. $8.00 6 Bearings, valve rocker....................... Pkg.2 $6.50 8 Coupler pockets, 3-level, for link & pin..... Pkg. 2 $5.75 9 Backhead w/fire door base.................... Ea. $9.00 10 Fire door, working........................... Ea. $7.75 11 Journal, 3/32" bore.......................... Pkg. 4. $5.75 12 Coupler pockets, small, S.F. Street Railway.. Pkg.2 $5.25 13 Brakes, engine............................... Pkg.2 $7.00 14 Smokebox, 22"OD, w/working door.............. Ea. $13.00 15 Drawbar, rear link & pin..................... Ea. $5.00 16 Handles, firedoor............................ Pkg.2. $5.00 17 Shelf, oil can, backhead..................... Ea. $5.75 18 Gauge, backhead, steam pressure.............. Ea. $5.50 19 Lubricator, triple-feed, w/bracket, Seibert.. Ea. $7.50 20 Tri-cock drain w/3 valves, backhead.......... Ea. $5.75 21 Tri-cock valves, backhead, (pl. 48461)....... Pkg. 3 $5.50 23 Throttle, nonworking......................... Ea. $6.75 23.1 Throttle, non working, plastic............... Ea. $5.50 24 Pop-off, pressure, spring & arm.............. Ea. $6.00 25 Levers, reverse/brake, working............... Kit. $7.50 26 Tri-cock drain, less valves.................. Ea. $5.75 27 Seat boxes w/backs........................... Pkg.2 $7.50 28 Injector w/piping, Penberthy,................ Pkg.2 $6.75 29 Oiler, small hand, N/S....................... Pkg.2 $6.00 32 Retainers, journal........................... Pkg. -

The Personal Rover Project: the Comprehensive Design of A
Robotics and Autonomous Systems 42 (2003) 245–258 The Personal Rover Project: The comprehensive design of a domestic personal robot Emily Falcone∗, Rachel Gockley, Eric Porter, Illah Nourbakhsh The Robotics Institute, Carnegie Mellon University, Newell-Simon Hall 3111, 5000 Forbes Ave., Pittsburgh, PA 15213, USA Abstract In this paper, we summarize an approach for the dissemination of robotics technologies. In a manner analogous to the personal computer movement of the early 1980s, we propose that a productive niche for robotic technologies is as a long-term creative outlet for human expression and discovery. To this end, this paper describes our ongoing efforts to design, prototype and test a low-cost, highly competent personal rover for the domestic environment. © 2003 Elsevier Science B.V. All rights reserved. Keywords: Social robots; Educational robot; Human–robot interaction; Personal robot; Step climbing 1. Introduction duration of interaction and the roles played by human and robot participants. In cases where the human care- Robotics occupies a special place in the arena of giver provides short-term, nurturing interaction to a interactive technologies. It combines sophisticated robot, research has demonstrated the development of computation with rich sensory input in a physical effective social relationships [5,12,21]. Anthropomor- embodiment that can exhibit tangible and expressive phic robot design can help prime such interaction ex- behavior in the physical world. periments by providing immediately comprehensible In this regard, a central question that occupies our social cues for the human subjects [6,17]. research group pertains to the social niche of robotic In contrast, our interest lies in long-term human– artifacts in the company of the robotically uninitiated robot relationships, where a transient suspension of public-at-large: What is an appropriate first role for in- disbelief will prove less relevant than long-term social telligent human–robot interaction in the daily human engagement and growth. -
4 Perception 79
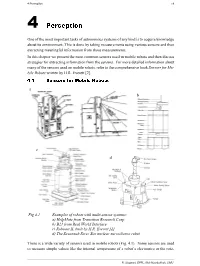
4 Perception 79 4 Perception One of the most important tasks of autonomous systems of any kind is to acquire knowledge about its environment. This is done by taking measurements using various sensors and then extracting meaningful information from those measurements. In this chapter we present the most common sensors used in mobile robots and then discuss strategies for extracting information from the sensors. For more detailed information about many of the sensors used on mobile robots, refer to the comprehensive book Sensors for Mo- bile Robots written by H.R. Everett [2]. 4.1 Sensors for Mobile Robots a b c d Fig 4.1 Examples of robots with multi-sensor systems: a) HelpMate from Transition Research Corp. b) B21 from Real World Interface c) Roboart II, built by H.R. Everett [2] d) The Savannah River Site nuclear surveillance robot There is a wide variety of sensors used in mobile robots (Fig. 4.1). Some sensors are used to measure simple values like the internal temperature of a robot’s electronics or the rota- R. Siegwart, EPFL, Illah Nourbakhsh, CMU 80 Autonomous Mobile Robots tional speed of the motors. Other, more sophisticated sensors can be used to acquire infor- mation about the robot’s environment or even to directly measure a robot’s global position. In this chapter we focus primarily on sensors used to extract information about the robot’s environment. Because a mobile robot moves around, it will frequently encounter unfore- seen environmental characteristics, and therefore such sensing is particularly critical. We begin with a functional classification of sensors. -

Locomotives and Views of Mauch Chunk Contact Photographs and Negatives 1969.092
Locomotives and views of Mauch Chunk contact photographs and negatives 1969.092 This finding aid was produced using ArchivesSpace on September 14, 2021. Description is written in: English. Describing Archives: A Content Standard Audiovisual Collections PO Box 3630 Wilmington, Delaware 19807 [email protected] URL: http://www.hagley.org/library Locomotives and views of Mauch Chunk contact photographs and negatives 1969.092 Table of Contents Summary Information .................................................................................................................................... 3 Historical Note ............................................................................................................................................... 3 Scope and Content ......................................................................................................................................... 4 Administrative Information ............................................................................................................................ 5 Related Materials ........................................................................................................................................... 6 Controlled Access Headings .......................................................................................................................... 6 Collection Inventory ....................................................................................................................................... 6 Rolling stock ............................................................................................................................................... -

Pixy Hardware Interface
SSttrriikkeerr EEL 4914 Senior Design I Group 8 Cruz, Efrain Decamp, Loubens Narvaez, Luis Thomas, Brian Competitive Autonomous Air-Hockey Gaming system Table of Contents Table of Contents .................................................................................................. i 1 Executive Summary .......................................................................................... 1 2 Project Description ............................................................................................ 3 2.1 Motivation ................................................................................................................. 3 2.2 Goals and Objectives ................................................................................................. 4 2.3 Requirements and Specifications ........................................................................... 4 2.3.1 User Interface .................................................................................................... 4 2.3.2 Audio and Visual Effects .................................................................................... 6 2.3.3 Tracking System ................................................................................................. 7 2.3.4 Software .............................................................................................................. 9 2.3.5 System Hardware .............................................................................................. 10 2.3.6 Puck Return Mechanism .................................................................................. -

Botball Kit for Teaching Engineering Computing
Botball Kit for Teaching Engineering Computing David P. Miller Charles Winton School of AME Department of CIS University of Oklahoma University of N. Florida Norman, OK 73019 Jacksonville, FL 32224 Abstract Many engineering classes can benefit from hands on use of robots. The KISS Institute Botball kit has found use in many classes at a number of universities. This paper outlines how the kit is used in a few of these different classes at a couple of different universities. This paper also introduces the Collegiate Botball Challenge, and how it can be used as a class project. 1 Introduction Introductory engineering courses are used to teach general principles while introducing the students to all of the engineering disciplines. Robotics, as a multi-disciplinary application can be an ideal subject for projects that stress the different engineering fields. A major consideration in establishing a robotics course emphasizing mobile robots is the type of hands-on laboratory experience that will be incorporated into the course of instruction. Most electrical engineering schools lack the machine shops and expertise needed to create the mechanical aspects of a robot system. Most mechanical engineering schools lack the electronics labs and expertise needed for the actuation, sensing and computational aspects required to support robotics work. The situation is even more dire for most computer science schools. Computer science departments typically do not have the support culture for the kind of laboratories that are more typically associated with engineering programs. On the other hand, it is recognized that computer science students need courses which provide closer to real world experiences via representative hands-on exercises. -

A Multi-Robot Search and Retrieval System
From: AAAI Technical Report WS-02-18. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved. MinDART : A Multi-Robot Search & Retrieval System Paul E. Rybski, Amy Larson, Heather Metcalf, Devon Skyllingstad, Harini Veeraraghavan and Maria Gini Department of Computer Science and Engineering, University of Minnesota 4-192 EE/CS Building Minneapolis, MN 55455 {rybski,larson,hmetcalf,dsky,harini,gini}@cs.umn.edu Abstract We are interested in studying how environmental and control factors affect the performance of a homogeneous multi-robot team doing a search and retrieval task. We have constructed a group of inexpensive robots called the Minnesota Distributed Autonomous Robot Team (MinDART) which use simple sen- sors and actuators to complete their tasks. We have upgraded these robots with the CMUCam, an inexpensive camera sys- tem that runs a color segmentation algorithm. The camera allows the robots to localize themselves as well as visually recognize other robots. We analyze how the team’s perfor- mance is affected by target distribution (uniform or clumped), size of the team, and whether search with explicit localization is more beneficial than random search. Introduction Cooperating teams of robots have the potential to outper- form a single robot attempting an identical task. Increasing Figure 1: The robots with their infrared targets and colored task or environmental knowledge may also improve perfor- landmarks. mance, but increased performance comes at a price. In addi- tion to the monetary concerns of building multiple robots, AAAI 2002 Mobile Robot Competition and Exhibition. Fi- the complexity of the control strategy and the processing nally, we analyze how we would expect these robots to per- overhead can outweigh the benefits. -

No1 Fi'. 0, 15'418
No1 fi'. 0, 15'418 ,RAILROADS OF THE SOUTH BEFORE 1860 THESIS Presented to the Graduate Council of the North Texas State College in Partial Fulfillment of the requirements For the Degree of MASTER OF ARTS By Jame s D. Carter, B.S. Evant, Texas June, 1950 ' C.LIP TABLE OF CONTENTS page LIST OF TABLES . * . * . * . * vi LIST OF MAPS . vii Chapter INTRCDUJ TION . * Characteristics of the South and Its Transportation Before 1830 Factors contributing to the Need for Better Transportation System Summary of the Geography of the South Natural Trade Centers of the South Factors Related to Railroad Construction I. THE INTRODUCTION O RAILROADS INTO THE SOUTH . 18 Charleston's Problems Projection of the Charleston and hamburg Railroad Construction of the Railroad Early Success Projection of Feeder Lines Louisville, Charleston, and Cincinnati Project II. MAJOR RAILROADS OF GEORGIA . 44 Georgia R railroad and Banking Corpany Central of Georgia Railroad System Macon and Western Railroad Southwestern Railroad Western and Atlantic Railroad III. MINOR RAILROADS OF TE EASTERN COTTON BELT . 80 Inland South Carolina Railroads Coastal Railroads of South Carolina inor Roads of Southern Georgis and Florida Minor roads in the Western Part of the Area Final Attempts to Build Trans--montane Lines iii IV. RAILROADS OF TOBACCO REGION OF VIRGINIA AND NORTH CAROLINA . 104 Railroad Construction in Virginia Connection of Virginia and Tennessee Railroads Summary of Railroad Construction in Virginia North and South Railroads of North Carolina East and "est Railroads of North Carolina Summary of Railroad Construction in North Carolina V. RAILROADS OF THI BLUE GRASS RGION . 144 Early Transportation Situation Railroad Construction in the Region Summary of Connections to other Regions Sumnary of Railroad Construction in Tennessee VI, RAILROADS OF T WESTERN COTTON tELT EAT OF THE :IISSIIPPI RIVER . -
Reference Guide – 2008 Waybill Sample
REFERENCE GUIDE FOR THE 2008 SURFACE TRANSPORTATION BOARD CARLOAD WAYBILL SAMPLE Business Services Division August 31, 2009 This publication is produced under contract to the Surface Transportation Board Contract DFTR 53-02-C-00073 TABLE OF CONTENTS SECTION 1 Summary of 2008 Waybill Processing.............................................................. 1 Waybills of US, Canadian & Mexican Origin ........................................................................................................... 5 Waybills of US Origin ............................................................................................................................................. 10 Waybills of Canadian Origin ................................................................................................................................... 15 Waybills of Mexican Origin .................................................................................................................................... 20 SECTION 2 Error Analysis and Corrective Action ........................................................... 26 2008 Reporting Railroads ........................................................................................................................................ 35 Proxy Equipment Types for the 2008 Carload Waybill Sample ............................................................................. 36 SECTION 3 Data Exceptions ................................................................................................ 37 Railinc Waybill -

February Final.Indd
RAIL REPORT February 2010 • NO. 598 Rocky Mountain Railroad Club • Rocky Mountain Railroad Historical Foundation Steam Locomotives of the Katy Railroad Presented by John Charles February 9th, 2010 • 7:30 PM Steam Locomotives of the Katy Railroad is a digital program on the history and development of steam locomotives on the Missouri Kansas Texas (Katy) Railroad. Covering everything from the 4-4-0s of 1880 to the last use of steam in the early 1950s, the program will include roster shots and a lot of action photos as well. The program ends with a selection of excellent color action shots by Emery Gulash. Please come join us for an enjoyable, educational evening at Christ Episcopal Church at 2950 South University Boulevard, University at Bates, where there is plen- ty of off street parking at the rear of the complex. Enter into Barnes Hall, where we hold the monthly meetings, on the mid-south side doors. Please bring a guest. All programs are intended to provide an educational experience on railroading. The general public is welcome to attend. There is no charge for this meeting. Please note: Due to scheduling changes at the Church, beginning in April our meeting night will change to the second Wednesday of the month. RMRRC Calendar March 9th Meeting, and PeruRail program. April 14th Second Wednesday Meeting, with program to be announced soon. May 12th Second Wednesday Meeting, with program to be announced soon. Due to circumstances beyond our control, programs and dates are subject to change without notice. Please contact Pat Mauro at [email protected] or phone 303-838-7740 with program ideas.