Quantitative Analysis of the Polarity Reversal Pattern of the Earth's Magnetic Field and Self-Reversing Dynamo Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Is Earth's Magnetic Field Reversing? ⁎ Catherine Constable A, , Monika Korte B
Earth and Planetary Science Letters 246 (2006) 1–16 www.elsevier.com/locate/epsl Frontiers Is Earth's magnetic field reversing? ⁎ Catherine Constable a, , Monika Korte b a Institute of Geophysics and Planetary Physics, Scripps Institution of Oceanography, University of California at San Diego, La Jolla, CA 92093-0225, USA b GeoForschungsZentrum Potsdam, Telegrafenberg, 14473 Potsdam, Germany Received 7 October 2005; received in revised form 21 March 2006; accepted 23 March 2006 Editor: A.N. Halliday Abstract Earth's dipole field has been diminishing in strength since the first systematic observations of field intensity were made in the mid nineteenth century. This has led to speculation that the geomagnetic field might now be in the early stages of a reversal. In the longer term context of paleomagnetic observations it is found that for the current reversal rate and expected statistical variability in polarity interval length an interval as long as the ongoing 0.78 Myr Brunhes polarity interval is to be expected with a probability of less than 0.15, and the preferred probability estimates range from 0.06 to 0.08. These rather low odds might be used to infer that the next reversal is overdue, but the assessment is limited by the statistical treatment of reversals as point processes. Recent paleofield observations combined with insights derived from field modeling and numerical geodynamo simulations suggest that a reversal is not imminent. The current value of the dipole moment remains high compared with the average throughout the ongoing 0.78 Myr Brunhes polarity interval; the present rate of change in Earth's dipole strength is not anomalous compared with rates of change for the past 7 kyr; furthermore there is evidence that the field has been stronger on average during the Brunhes than for the past 160 Ma, and that high average field values are associated with longer polarity chrons. -
The Rock and Fossil Record the Rock and Fossil Record the Rock And
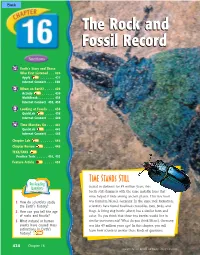
TheThe RockRock andand FossilFossil RecordRecord Earth’s Story and Those Who First Listened . 426 Apply . 427 Internet Connect . 428 When on Earth? . 429 Activity . 430 MathBreak . 434 Internet Connect 432, 435 Looking at Fossils . 436 QuickLab . 438 Internet Connect . 440 Time Marches On . 441 QuickLab . 443 Internet Connect . 445 Chapter Lab . 446 Chapter Review . 449 TEKS/TAKS Practice Tests . 451, 452 Feature Article . 453 Time Stands Still Pre-Reading Questions Sealed in darkness for 49 million years, this beetle still shimmers with the same metallic hues that once helped it hide among ancient plants. This rare fossil 1. How do scientists study was found in Messel, Germany. In the same rock formation, the Earth’s history? scientists have found fossilized crocodiles, bats, birds, and 2. How can you tell the age frogs. A living stag beetle (above) has a similar form and of rocks and fossils? color. Do you think that these two beetles would live in 3. What natural or human similar environments? What do you think Messel, Germany, events have caused mass was like 49 million years ago? In this chapter, you will extinctions in Earth’s learn how scientists answer these kinds of questions. history? 424 Chapter 16 Copyright © by Holt, Rinehart and Winston. All rights reserved. MAKING FOSSILS Procedure 1. You and three or four of your classmates will be given several pieces of modeling clay and a paper sack containing a few small objects. 2. Press each object firmly into a piece of clay. Try to leave an imprint showing as much detail as possible. -

39. Paleomagnetic Results from Early Tertiary/Late Cretaceous Sediments of Site 384
39. PALEOMAGNETIC RESULTS FROM EARLY TERTIARY/LATE CRETACEOUS SEDIMENTS OF SITE 384 P. A. Larson and N. D. Opdyke, Lamont-Doherty Geological Observatory, Palisades, New York ABSTRACT Magnetic measurements were made on samples taken from the region of the Tertiary/Cretaceous boundary at Site 384. We had hoped that the magnetic stratigraphy of this section could be used to independently substantiate the magnetic stratigraphy of a section of the same age at Gubbio, Italy. Although an attempt has been made to correlate the two sections, the quality of the magnetic data is too poor either to confirm or deny the Gubbio results. INTRODUCTION inclination for this section of Site 384 should lie be¬ tween 46° and 58°. This range of inclinations is indi¬ A type section for the Late Cretaceous-Paleocene cated by the two stippled bands on the plot in Figure portion of the geomagnetic reversal time scale has been 2. As can seen in the figure, the actual inclination val¬ proposed recently from studies of the pelagic limestone ues are considerably scattered. The normally magnet¬ sequence at Gubbio, Italy (Alvarez et al., 1977; Lowrie ized specimens have an average inclination of 43.3° and Alvarez, 1977; Roggenthen and Napoleone, (standard deviation = 19.6°), while the reversely 1977). The upper Maestrichtian-Danian sediments magnetized ones average -24.9° (standard deviation from Site 384 were studied to see whether they would = 22.1°). These averages exclude specimens which fall yield a magnetic stratigraphy correlative to the section within the two hachured zones in the polarity diagram at Gubbio. of Figure 2. -

Geologic Time and Geologic Maps
NAME GEOLOGIC TIME AND GEOLOGIC MAPS I. Introduction There are two types of geologic time, relative and absolute. In the case of relative time geologic events are arranged in their order of occurrence. No attempt is made to determine the actual time at which they occurred. For example, in a sequence of flat lying rocks, shale is on top of sandstone. The shale, therefore, must by younger (deposited after the sandstone), but how much younger is not known. In the case of absolute time the actual age of the geologic event is determined. This is usually done using a radiometric-dating technique. II. Relative geologic age In this section several techniques are considered for determining the relative age of geologic events. For example, four sedimentary rocks are piled-up as shown on Figure 1. A must have been deposited first and is the oldest. D must have been deposited last and is the youngest. This is an example of a general geologic law known as the Law of Superposition. This law states that in any pile of sedimentary strata that has not been disturbed by folding or overturning since accumulation, the youngest stratum is at the top and the oldest is at the base. While this may seem to be a simple observation, this principle of superposition (or stratigraphic succession) is the basis of the geologic column which lists rock units in their relative order of formation. As a second example, Figure 2 shows a sandstone that has been cut by two dikes (igneous intrusions that are tabular in shape).The sandstone, A, is the oldest rock since it is intruded by both dikes. -
Soils in the Geologic Record
in the Geologic Record 2021 Soils Planner Natural Resources Conservation Service Words From the Deputy Chief Soils are essential for life on Earth. They are the source of nutrients for plants, the medium that stores and releases water to plants, and the material in which plants anchor to the Earth’s surface. Soils filter pollutants and thereby purify water, store atmospheric carbon and thereby reduce greenhouse gasses, and support structures and thereby provide the foundation on which civilization erects buildings and constructs roads. Given the vast On February 2, 2020, the USDA, Natural importance of soil, it’s no wonder that the U.S. Government has Resources Conservation Service (NRCS) an agency, NRCS, devoted to preserving this essential resource. welcomed Dr. Luis “Louie” Tupas as the NRCS Deputy Chief for Soil Science and Resource Less widely recognized than the value of soil in maintaining Assessment. Dr. Tupas brings knowledge and experience of global change and climate impacts life is the importance of the knowledge gained from soils in the on agriculture, forestry, and other landscapes to the geologic record. Fossil soils, or “paleosols,” help us understand NRCS. He has been with USDA since 2004. the history of the Earth. This planner focuses on these soils in the geologic record. It provides examples of how paleosols can retain Dr. Tupas, a career member of the Senior Executive Service since 2014, served as the Deputy Director information about climates and ecosystems of the prehistoric for Bioenergy, Climate, and Environment, the Acting past. By understanding this deep history, we can obtain a better Deputy Director for Food Science and Nutrition, and understanding of modern climate, current biodiversity, and the Director for International Programs at USDA, ongoing soil formation and destruction. -

A GEOLOGIC RECORD of the FIRST BILLION YEARS of MARS HISTORY. John F. Mustard1 and James W. Head1 1Department of Earth, Environm
49th Lunar and Planetary Science Conference 2018 (LPI Contrib. No. 2083) 2604.pdf A GEOLOGIC RECORD OF THE FIRST BILLION YEARS OF MARS HISTORY. John F. Mustard1 and James W. Head1 1Department of Earth, Environmental and Planetary Sciences, Box 1846, Brown University, Provi- dence, RI 02912 ([email protected]) Introduction: A compelling record of the first bil- standing solar system evolution question is the exist- lion years of Mars geologic evolution is spectacularly ence, or not, of a period of heavy bombardment ≈500 presented in a compact region at the intersection of Myr after accretion of the terrestrial planets. Except Isidis impact basin and Syrtis Major volcanic province for the Moon, we have no definitive dates for basins (Fig. 1). In this well-exposed region is a well-ordered formed in the Solar System. Radiometric systems in stratigraphy of geologic units spanning Noachian to crystalline igneous rocks exposed by Isidis would like- Early Hesperian times [1]. Geologic units can be de- ly have been reset and thus contain evidence of the finitively associated with the Isidis basin-forming im- impact providing a key data point for understanding pact (≈3.9 Ga, [2]) as well as pristine igneous and basin forming processes in the Solar System. Further- aqueously altered Noachian crust that pre-date the more the Isidis basin impacted onto the rim of the hy- Isidis event. The rich collection of well defined units pothesized Borealis Basin [7]. Given this proximity spanning ≈500 Myr of time in a compact region is at- there is a possibility that some fragments may have tractive for the collection of samples. -

Constraining in Situ Cosmogenic Nuclide Paleo-Production Rates Using Sequential Lava flows During a Paleomagnetic field Strength Low
Journal Pre-proof Constraining in situ cosmogenic nuclide paleo-production rates using sequential lava flows during a paleomagnetic field strength low A.M. Balbas, K.A. Farley PII: S0009-2541(19)30484-X DOI: https://doi.org/10.1016/j.chemgeo.2019.119355 Reference: CHEMGE 119355 To appear in: Received Date: 6 August 2019 Revised Date: 26 September 2019 Accepted Date: 31 October 2019 Please cite this article as: Balbas AM, Farley KA, Constraining in situ cosmogenic nuclide paleo-production rates using sequential lava flows during a paleomagnetic field strength low, Chemical Geology (2019), doi: https://doi.org/10.1016/j.chemgeo.2019.119355 This is a PDF file of an article that has undergone enhancements after acceptance, such as the addition of a cover page and metadata, and formatting for readability, but it is not yet the definitive version of record. This version will undergo additional copyediting, typesetting and review before it is published in its final form, but we are providing this version to give early visibility of the article. Please note that, during the production process, errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain. © 2019 Published by Elsevier. 1 Constraining in situ cosmogenic nuclide paleo-production rates using sequential lava flows during a paleomagnetic field strength low A.M. Balbas1,2*, K.A. Farley2 1 College of Earth, Ocean, and Atmospheric Sciences, Oregon State University, Corvallis, OR, USA 2Department of Geological and Planetary Sciences, California Institute of Technology, Pasadena, CA, USA * Corresponding author: [email protected] Abstract The geomagnetic field prevents a portion of incoming cosmic rays from reaching Earth’s atmosphere. -

Utah's Geologic Timeline Utah Seed Standard 7.2.6: Make an Argument from Evidence for How the Geologic Time Scale Shows the Ag
Utah’s Geologic Timeline Utah SEEd Standard 7.2.6: Make an argument from evidence for how the geologic time scale shows the age and history of Earth. Emphasize scientific evidence from rock strata, the fossil record, and the principles of relative dating, such as superposition, uniformitarianism, and recognizing unconformities. (ESS1.C) Activity Details: The students begin with a blank calendar and a list of events in the Earth’s, and additionally Utah’s, history. These events span billions of years, but such numbers are too large to visualize and compare. In order to help the mind understand such enormous lengths of time, the year of the event is scaled to what it would Be proportionate to a calendar year (numBers are from The Utah Geological Survey and Kentucky Geological Survey). The students go through the list and fill out their calendar to visualize the geologic timeline of the Earth and Utah, and then answer some analysis questions to help solidify their understanding. Students will need four differently-colored colored pencils or crayons to complete the activity. Background: The following information is taken from The Utah Geological Survey, written by Mark Milligan. It may Be helpful to define some of the terms with the students so they understand where and how ages come from. Geologists generally know the age of a rock By determining the age of the group of rocks, or formation, that it is found in. The age of formations is marked on a geologic calendar known as the geologic time scale. Development of the geologic time scale and dating of formations and rocks relies upon two fundamentally different ways of telling time: relative and absolute. -

Re-Examining the Evidence for Cycles in Magnetic Reversal Rate
Does the Planetary Dynamo Go Cycling On? Re-examining the Evidence for Cycles in Magnetic Reversal Rate Adrian L. Melott1, Anthony Pivarunas2, Joseph G. Meert2, Bruce S. Lieberman3 1University of Kansas, Department of Physics and Astronomy, Lawrence, KS, 66045; [email protected]; 785-864-3037 2University of Florida, Department of Geological Sciences, 241 Williamson Hall, Gainesville, FL 32611 3University of Kansas, Department of Ecology & Evolutionary Biology and Biodiversity Institute, 1345 Jayhawk Blvd., Lawrence, KS 66045 1 Abstract The record of reversals of the geomagnetic field has played an integral role in the development of plate tectonic theory. Statistical analyses of the reversal record are aimed at detailing patterns and linking those patterns to core-mantle processes. The geomagnetic polarity timescale is a dynamic record and new paleomagnetic and geochronologic data provide additional detail. In this paper, we examine the periodicity revealed in the reversal record back to 375 million years ago (Ma) using Fourier analysis. Four significant peaks were found in the reversal power spectra within the 16-40-million-year range (Myr). Plotting the function constructed from the sum of the frequencies of the proximal peaks yield a transient 26 Myr periodicity, suggesting chaotic motion with a periodic attractor. The possible 16 Myr periodicity, a previously recognized result, may be correlated with ‘pulsation’ of mantle plumes and perhaps; more tentatively, with core-mantle dynamics originating near the large low shear velocity layers in the Pacific and Africa. Planetary magnetic fields shield against charged particles which can give rise to radiation at the surface and ionize the atmosphere, which is a loss mechanism particularly relevant to M stars. -

Museum of Natural History & Science Gallery Guide for Lost Voices
Museum of Natural History & Science Gallery Guide for Lost Voices Lost Voices is a multi-part exhibit focusing on the varied life forms that have inhabited our planet in the past. This exhibit allows for a greater understanding of the history of our planet and also of our place on it. Concepts: background extinction, Cenozoic, Cretaceous, crust, environment, eons, epoch, era, evolution, extinction, fossil, fossil record, geologic record, geologist, Holocene, Jurassic, limestone, mantle, mass extinction, Mesozoic, period, plate tectonics, Quaternary, sandstone, Tertiary, tilt, Triassic, wobble Background Information: Scientists calculate the age of the Earth at approximately 4.6 billion years, and the planet has sustained life for over three million years. During this time, many changes have taken place in climate, placement of the continents and life forms. To assist in understanding this vast period of time, scientists have divided the time into sections. The longest period of time are called eons, which are divided into eras, which are then divided into periods, which are finally divided into epochs. Most people are familiar with the Mesozoic era, which consists of the Triassic, Jurassic, and Cretaceous periods. We currently live in the Cenozoic era, the Quaternary period and the Holocene epoch. The divisions between geologic time spans are often defined by a break in the fossil record or a geologic occurrence of some magnitude, such as a sudden widespread volcanic activity. For example, all available evidence points to the division of the Cretaceous and Tertiary periods caused by a giant asteroid strike off the coast of Mexico. The asteroid strike caused the extinction of over 80 percent of the planet’s life forms and created widespread geologic activity. -

Tectonics and Crustal Evolution
Tectonics and crustal evolution Chris J. Hawkesworth, Department of Earth Sciences, University peaks and troughs of ages. Much of it has focused discussion on of Bristol, Wills Memorial Building, Queens Road, Bristol BS8 1RJ, the extent to which the generation and evolution of Earth’s crust is UK; and Department of Earth Sciences, University of St. Andrews, driven by deep-seated processes, such as mantle plumes, or is North Street, St. Andrews KY16 9AL, UK, c.j.hawkesworth@bristol primarily in response to plate tectonic processes that dominate at .ac.uk; Peter A. Cawood, Department of Earth Sciences, University relatively shallow levels. of St. Andrews, North Street, St. Andrews KY16 9AL, UK; and Bruno The cyclical nature of the geological record has been recog- Dhuime, Department of Earth Sciences, University of Bristol, Wills nized since James Hutton noted in the eighteenth century that Memorial Building, Queens Road, Bristol BS8 1RJ, UK even the oldest rocks are made up of “materials furnished from the ruins of former continents” (Hutton, 1785). The history of ABSTRACT the continental crust, at least since the end of the Archean, is marked by geological cycles that on different scales include those The continental crust is the archive of Earth’s history. Its rock shaped by individual mountain building events, and by the units record events that are heterogeneous in time with distinctive cyclic development and dispersal of supercontinents in response peaks and troughs of ages for igneous crystallization, metamor- to plate tectonics (Nance et al., 2014, and references therein). phism, continental margins, and mineralization. This temporal Successive cycles may have different features, reflecting in part distribution is argued largely to reflect the different preservation the cooling of the earth and the changing nature of the litho- potential of rocks generated in different tectonic settings, rather sphere. -

GEOLOGY Geology Major GEO. GEOLOGY
GEOLOGY 14 Geology Major Fifth Semester The major leading to the B.S. degree emphasizes the fundamental of the [[CE-346]] Rock Engineering 3 science of geology with upper-level courses that provide both breadth and [[ENV-321]] Hydrology 3 depth in the curriculum. The program is designed to optimize classroom, [[ENV-323]] Hydrology Lab 1 lab, and field experiences and prepare students for the modern demands of [[GEO-345]] Stratigraphy and 4 a geoscientist or entry into graduate school. Total credits - 122 Sedimentation Geology B.S. Degree- Required Courses [[GIS-271]] Intro to GPS & GIS 3 and Recommended Course Sequence 14 First Semester Credits Sixth Semester [[CHM-115]] Elements & 3 [[EES-302]] Literature Methods 1 Compounds [[EES-304]] Environmental Data 2 [[CHM-113]] Elements & 1 Analysis Compounds Lab [[GEO-349]] Structure and 4 [[ENG-101]] Composition 4 Tectonics [[FYF-101]] First-Year Foundations 3 [[GEO-351]] Paleoclimatology 3 [[MTH-111]] Calculus I 4 [[GEO-352]] Hydrogeology 3 15 [[GIS-272]] Advanced GIS & 3 Remote Sensing Second Semester 16 [[CHM-116]] The Chemical 3 Reaction Summer Session [[CHM-114]] The Chemical 1 [[GEO-380]] Geology Field Camp 4 Reaction Lab [[GEO-101]] Intro to Geology 3 [[GEO-103]] Intro to Geology Lab 1 Seventh Semester [[MTH-112]] Calculus II 4 [[GEO-390]] Applied Geophysics 3 Distribution Requirement 3 [[GEO-391]] Senior Projects I 1 15 Distribution Requirements 6 Third Semester Program Elective 3 13 [[GEO-212]] Historical Geology 3 [[GEO-281]] Mineralogy 4 Eighth Semester [[MTH-150]] Elementary Statistics 3 [[GEO-370]] Geomorphology 3 [[PHY-171]] Principles of Classical 4 [[GEO-392]] Senior Projects II 2 and Modern Physics Distribution Requirements 3 Distribution Requirement 3 Free Elective 3 17 Program Elective 3 Fourth Semester 14 [[EES-240]] Principles of 3 Environmental Engineering & GEO.