Cetiie B Tia Nature Red Acted
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Classic VHF Sound Broadcasting at Its Very Best
Articles Solid-state VHF FM Transmitters SR6..E1 ured or integrated, even using standard equipment, to fulfill specific customer requirements. Classic VHF sound broadcasting The VHF FM transmitters can be used as stand-alones, in passive (1+1) or (n+1) at its very best standby configurations and with exciter standby. All modules and units are accommodated in a 19-inch rack for Despite digital audio and video broadcasting, forecasts still anticipate an attrac- ease of access. The main modules can tive market ahead for analog FM transmitter technology over the next 15 to be replaced without disconnecting 20 years. Rohde & Schwarz responded to these prospects and revised its highly cables. So a transmitter can be set successful, tried and tested generation of solid-state transmitters. The result is up very quickly and, in the unlikely even more compact transmitters for an excellent price/performance ratio. event of a module failing, it can be exchanged in practically no time. Solid-state VHF FM Transmitter pact design with easy access to major Design and function NR410T1 [1] was thoroughly rede- components, higher MTBF and opera- signed to create the new transmitters tion up to a VSWR of 3. They also inte- 10 kW VHF FM Transmitter SR610E1 SR610E1 for 10 kW, SR605E1 for grate new remote control standards (FIG 1) is taken as an example to 5 kW and SR602E1 for 2.5 kW. and feature high flexibility in terms of explain transmitter design and func- Compared to their predecessors they system integration. tion. It comprises the following main are superior in efficiency, in their com- modules (FIG 2): • VHF FM Transmitter SU135 (exciter), Characteristics • four VHF Amplifiers VU320, • 4-way splitter, These VHF transmitters for FM sound • 4:1 combiner, broadcasting operate in the frequency • high-power supply unit with two band 87.5 MHz to 108 MHz and gen- transformers, rectifier block, filtering erate a nominal output power of 10 kW, and four DC converters of 3 kW 5 kW or 2.5 kW into 50 Ω at an each, efficiency of over 60 %. -
High Frequency Communications – an Introductory Overview
High Frequency Communications – An Introductory Overview - Who, What, and Why? 13 August, 2012 Abstract: Over the past 60+ years the use and interest in the High Frequency (HF -> covers 1.8 – 30 MHz) band as a means to provide reliable global communications has come and gone based on the wide availability of the Internet, SATCOM communications, as well as various physical factors that impact HF propagation. As such, many people have forgotten that the HF band can be used to support point to point or even networked connectivity over 10’s to 1000’s of miles using a minimal set of infrastructure. This presentation provides a brief overview of HF, HF Communications, introduces its primary capabilities and potential applications, discusses tools which can be used to predict HF system performance, discusses key challenges when implementing HF systems, introduces Automatic Link Establishment (ALE) as a means of automating many HF systems, and lastly, where HF standards and capabilities are headed. Course Level: Entry Level with some medium complexity topics Agenda • HF Communications – Quick Summary • How does HF Propagation work? • HF - Who uses it? • HF Comms Standards – ALE and Others • HF Equipment - Who Makes it? • HF Comms System Design Considerations – General HF Radio System Block Diagram – HF Noise and Link Budgets – HF Propagation Prediction Tools – HF Antennas • Communications and Other Problems with HF Solutions • Summary and Conclusion • I‟d like to learn more = “Critical Point” 15-Aug-12 I Love HF, just about On the other hand… anybody can operate it! ? ? ? ? 15-Aug-12 HF Communications – Quick pretest • How does HF Communications work? a. -
Monitoring Times 2000 INDEX
Monitoring Times 1994 INDEX FEATURES: Air Show: Triumph to Tragedy Season Aug JUNE Duopolies and DXing Broadcast: Atlantic City Aero Monitoring May JULY TROPO Brings in TV & FM A Journey to Morocco May Dayton's Aviation Extravaganza DX Bolivia: Radio Under the Gun June June AUG Low Power TV Stations Broadcasting Battlefield, Colombia Flight Test Communications Jan SEP WOW, Omaha Dec Gathering Comm Intelligence OCT Winterizing Chile: Land of Crazy Geography June NOV Notch filters for good DX April Military Low Band Sep DEC Shopping for DX Receiver Deutsche Welle Aug Monitoring Space Shuttle Comms European DX Council Meeting Mar ANTENNA TOPICS Aug Monitoring the Prez July JAN The Earth’s Effects on First Year Radio Listener May Radio Shows its True Colors Aug Antenna Performance Flavoradio - good emergency radio Nov Scanning the Big Railroads April FEB The Half-Rhombic FM SubCarriers Sep Scanning Garden State Pkwy,NJ MAR Radio Noise—Debunking KNLS Celebrates 10 Years Dec Feb AntennaResonance and Making No Satellite or Cable Needed July Scanner Strategies Feb the Real McCoy Radio Canada International April Scanner Tips & Techniques Dec APRIL More Effects of the Earth on Radio Democracy Sep Spy Catchers: The FBI Jan Antenna Radio France Int'l/ALLISS Ant Topgun - Navy's Fighter School Performance Nov Mar MAY The T2FD Antenna Radio Gambia May Tuning In to a US Customs Chase JUNE Antenna Baluns Radio Nacional do Brasil Feb Nov JULY The VHF/UHF Beam Radio UNTAC - Cambodia Oct Video Scanning Aug Traveler's Beam Restructuring the VOA Sep Waiting -
The Development of HF Broadcast Antennas
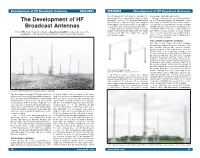
Development of HF Broadcast Antennas FEATURES FEATURES Development of HF Broadcast Antennas the 50% power loss, but made the Rhombic fre - Free Europe and Radio Liberty sites. quency-sensitive, consequently losing the wide- Rhombic antennas are no longer recommend - The Development of HF bandwidth feature. The available bandwidth ed for HF broadcasting as the main lobe is nar - depends on the length of the wire and, using dif - row in both horizontal and vertical planes which ferent lengths of transmission line, it is possible to can result in the required service area not being Broadcast Antennas access two or three different broadcast bands. reliably covered because of the variations in the A typical rhombic antenna design uses side ionosphere. There are also a large number of lengths of several wavelengths and is at a height side lobes of a size sufficient to cause interfer - Former BBC Senior Transmitter Engineer Dave Porter G4OYX continues the story of the of between 0.5-1.0 λ at the middle of the operat - ence to other broadcasters, and a significant pro - development of HF broadcast antennas from curtain arrays to Allis antennas ing frequency range. portion of the transmitter power is dissipated in the terminating resistance. THE CORNER QUADRANT ANTENNA Post War it was found that if the Rhombic Antenna was stripped down and, instead of the four elements, had just two end-fed half-wave dipoles placed at a right angle to each other (as shown in Fig. 1) the result was a simple cost- effective antenna which had properties similar to the re-entrant Rhombic but with a much smaller footprint. -

An Update on the CCSDS Optical Communications Working Group Interoperability Standards
An Update on the CCSDS Optical Communications Working Group Interoperability Standards Bernard L. Edwards Robert Daddato NASA Goddard Space Flight Center European Space Agency Greenbelt, MD 20771 USA Darmstadt, Germany Klaus-Juergen Schulz Randall Alliss European Space Agency Northrop Grumman Corporation Darmstadt, Germany McLean, VA 22102 USA Jon Hamkins Dirk Giggenbach NASA Jet Propulsion Laboratory DLR Pasadena, CA 91109 USA Oberpfaffenhofen, Germany Bryan Robinson Lena Braatz MIT Lincoln Laboratory Booz Allen Hamilton, Inc. Lexington, MA 02420 USA McLean, VA 22102 USA Abstract – International space agencies around the one space agency’s spacecraft could be served by world are working together in the Interagency another space agency’s ground antennas. Operation Advisory Group (IOAG) and the Consultative Committee for Space Data Systems The overall development of international space (CCSDS) to develop interoperability standards for optical communications. The standards support communication standards for cross support is optical communication systems for both Near Earth coordinated by the Interagency Operations and Deep Space robotic and human-rated spacecraft. Advisory Group (IOAG) [1]. The IOAG is an The standards generally address both free space links organization made up of international space between spacecraft and free space links between agencies that provides a forum for identifying spacecraft and ground. This paper will overview the common needs and coordinating space history and structure of the CCSDS Optical communications policy, high-level procedures, Communications Working Group and provide an technical interfaces, and other matters related to update on the set of optical communications interoperability and space communications. The standards being developed. The paper will address the ongoing work on High Photon Efficiency IOAG considers the future requirements and trends communications, High Data Rate communications, in spacecraft communications needs and assigns and Optical On/Off Keying communications. -

EN 301 489-11 V1.1.1 (2002-03) Candidate Harmonized European Standard (Telecommunications Series)
ETSI EN 301 489-11 V1.1.1 (2002-03) Candidate Harmonized European Standard (Telecommunications series) Electromagnetic compatibility and Radio spectrum Matters (ERM); ElectroMagnetic Compatibility (EMC) standard for radio equipment and services; Part 11: Specific conditions for analogue terrestrial sound broadcasting (Amplitude Modulation (AM) and Frequency Modulation (FM)) service transmitters 2 ETSI EN 301 489-11 V1.1.1 (2002-03) Reference REN/ERM-EMC-225-11 Keywords broadcast, EMC, radio, regulation, testing, VHF ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice Individual copies of the present document can be downloaded from: http://www.etsi.org The present document may be made available in more than one electronic version or in print. In any case of existing or perceived difference in contents between such versions, the reference version is the Portable Document Format (PDF). In case of dispute, the reference shall be the printing on ETSI printers of the PDF version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, send your comment to: [email protected] Copyright Notification No part may be reproduced except as authorized by written permission. -

Emergency Broadcasting Over CATV Channel Using FM Subcarrier Technology
International Journal of Future Generation Communication and Networking Vol. 9, No. 12 (2016), pp. 1-16 http://dx.doi.org/10.14257/ijfgcn.2016.9.12.01 Emergency Broadcasting over CATV Channel using FM Subcarrier Technology Yan Ma1*, Chunjiang Liu, SenHua Ding and Naiguang Zhang 2 1Communication University of China 2Academy of Broadcasting Science, SARFT [email protected] 2{liuchunjiang, dingsenhua, zhangnaiguang}@abs.ac.cn Abstract Emergency broadcasting is of importance method to alert people when disaster happens, but the development of network is slow in Chinese rural areas. So it is necessary to propose an emergency broadcasting solution for Chinese rural areas based on the available network. In this paper, a method that adopts FM subcarrier technology over CATV channel to broadcast emergency message have been proposed. In the method, emergency program is transmitted by CATV channel and emergency order is carried in FM subcarrier. As usual, to communicate emergency message to the public efficiently and effectively, a complete emergency broadcasting system should have following functions such as parallel broadcasting, compatibility, robustness, security, and so on. In the context, to satisfy above requirements, corresponding system construction, communication scheme, and message transmission protocol have been proposed as well. To verify the practicability, the solutions have been test in Chinese rural areas MiYun and gain good results. Keywords: Emergency Broadcasting, Cable FM Subcarrier, RDS, Transport Protocol 1. Introduction 1.1. Background Emergency broadcasting message can be transported by varies of ways, such as mobile network [1, 2], Internet network [3], FM network [4], digital TV network [5] and so on. In the article, we pay our focus on researching emergency transportation scheme for rural areas in China. -

Middle Eastern Digital Media, Broadband and Internet Markets
A BUDDECOMM REPORT MIDDLE EASTERN DIGITAL MEDIA, BROADBAND AND INTERNET MARKETS 9th Edition Researcher: Tine Lewis Copyright 2010 Published in August 2010 Paul Budde Communication Pty Ltd Tel 02 4998 8144 – Int: 61 2 4998 8144 5385 George Downes Drive Fax 02 4998 8247 – Int: 61 2 4998 8247 BUCKETTY NSW 2250 Email: [email protected] AUSTRALIA Website: www.budde.com.au Middle Eastern Digital Media, Broadband and Internet Markets Disclaimer: The r eader a ccepts a ll r isks a nd responsibility f or l osses, da mages, costs a nd other c onsequences resulting directly o r i ndirectly f rom u sing this report or from reliance on any information, opinions, estimates a nd forecasts c ontained herein. T he i nformation c ontained herein ha s been obtained f rom sources believed to be reliable. Paul Budde Communication Pty Ltd disclaims all warranties as to the accuracy, co mpleteness o r a dequacy of s uch i nformation an d s hall have n o l iability f or er rors, omissions or inadequacies in the information, opinions, estimates and forecasts contained herein. The materials in this report are for informational purposes only. Prior to making any investment decision, it is recommended that the reader consult directly with a qualified investment advisor. Forecasts: The following provides some background to our scenario forecasting methodology: • This report i ncludes w hat we t erm s cenario forecasts. B y d escribing l ong-range s cenarios w e identify a band within which we expect market growth to occur. -
High Frequency Communications – an Introductory Overview - Who, What, and Why?
High Frequency Communications – An Introductory Overview - Who, What, and Why? 12 April, 2012 Abstract: Over the past 60+ years the use and interest in the High Frequency (HF -> covers 1.8 – 30 MHz) band as a means to provide reliable global communications has come and gone based on the wide availability of the Internet, SATCOM communications, as well as various physical factors that impact HF propagation. As such, many people have forgotten that the HF band can be used to support point to point or even networked connectivity over 10’s to 1000’s of miles using a minimal set of infrastructure. This presentation provides a brief overview of HF, HF Communications, introduces its primary capabilities and potential applications, discusses tools which can be used to predict HF system performance, discusses key challenges when implementing HF systems, introduces Automatic Link Establishment (ALE) as a means of automating many HF systems, and lastly, where HF standards and capabilities are headed. Course Level: Entry Level with some medium complexity topics Agenda • HF Communications – Quick Summary • How does HF Propagation work? • HF - Who uses it? • HF Comms Standards – ALE and Others • HF Equipment - Who Makes it? • HF Comms System Design Considerations – General HF Radio System Block Diagram – HF Noise and Link Budgets – HF Propagation Prediction Tools – HF Antennas • Communications and Other Problems with HF Solutions • Summary and Conclusion • I‟d like to learn more = “Critical Point” 13-Apr-12 I Love HF, just about On the other hand… anybody can operate it! ? ? ? ? 13-Apr-12 HF Communications – Quick pretest • How does HF Communications work? a. -

Itu-R Bs.1894 (2011/05)
ITU-R BS.1894 (2011/05) BS ITU-R BS.1894 ii (IPR) (ITU-T/ITU-R/ISO/IEC) ITU-R 1 1 http://www.itu.int/ITU-R/go/patents/en http://www.itu.int/publ/R-REC/en BO BR BS BT F M P RA RS S SA SF SM SNG TF V ITU-R 1 2011 ITU 2011 (ITU) 1 ITU-R BS.1894 ITU-R BS.1894 (2011) (FM) ITU-R BS.1114 650 (CRPD) 9 Eureka 147 A ITU-R BS.1114 C ISDB-TSB F (DAB) IBOC DSB (FM) A (RDS) ITU-R BS.643 (DARC) ITU-R BS.1194 1 ITU-R BS.1114 1 500 ITU-R BS.1894 2 2 2 C F A 1 FM 2 1 (DSB) (Advanced application services – Closed caption) AAS-CC (Digital audio broadcasting) DAB (Digital Radio Mondiale) DRM (Digital sound broadcasting) DSB (In-band on-channel) IBOC (Main service channel) MSC (Packetized elementary stream) PES SB (ntegrated services digital broadcasting – terrestrial sound broadcasting) DSB 1 bit/s 500 1 bit/s 500 ISO/IEC 11172-3 ITU-R BS.1114 ISO/IEC 13818-3 MPEG II (DAB) A ITU-R BS.1114 NRSC-5B AAS – CC (IBOC) C ITU-T H.222.0 ITU-R BS.1114 ARIB STD-B24 PES (ISDB-TSB) F 3 1 3 ITU-R BS.1894 ARIB STD-B24 Vol. 1 Part 3: Data coding and transmission specification for digital broadcasting, Volume 1, Part 3 – Coding of caption and superimpose. ISO/IEC 11172-3: Information technology – Coding of moving pictures and associated audio for digital storage media at up to about 1,5 Mbit/s – Part 3: Audio. -

Research Article Design of a Computationally Efficient Dynamic
Hindawi Publishing Corporation Journal of Electrical and Computer Engineering Volume 2012, Article ID 802606, 14 pages doi:10.1155/2012/802606 Research Article Design of a Computationally Efficient Dynamic System-Level Simulator for Enterprise LTE Femtocell Scenarios J. M. Ruiz-Aviles,´ S. Luna-Ramırez,M.Toril,F.Ruiz,I.delaBandera,P.Mu´ noz,˜ R. Barco, P. Lazaro,´ and V. Buenestado Communications Engineering Department, University of Malaga,´ 29071 Malaga,´ Spain Correspondence should be addressed to J. M. Ruiz-Aviles,´ [email protected] Received 9 March 2012; Accepted 26 October 2012 Academic Editor: Dharma Agrawal Copyright © 2012 J. M. Ruiz-Aviles´ et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In the context of Long-Term Evolution (LTE), the next generation mobile telecommunication network, femtocells are low- powerbasestationsthatefficiently provide coverage and capacity indoors. This paper presents a computationally efficient dynamic system-level LTE simulator for enterprise femtocell scenarios. The simulator includes specific mobility and trafficand propagation models for indoor environments. A physical layer abstraction is performed to predict link-layer performance with low computational cost. At link layer, two important functions are included to increase network capacity: Link Adaptation and Dynamic Scheduling. At network layer, other Radio Resource Management functionalities, such as Admission Control and Mobility Management, are also included. The resulting tool can be used to test and validate optimization algorithms in the context of Self-Organizing Networks (SON). 1. Introduction is applied to those networks including self-configuration, self-optimization, and self-healing [3]. -

Signal Issue 27
Signal Issue 27 Tricks of the Trade Dave Porter G4OYX Last time in ToTT, we had arrived at the point in the development of broadcast HF arrays where the HRRS 4/4/1 reigned supreme. This status was no doubt due to its versatility having slew, reversal and the ability to use half the array, reducing the aperture but spreading a signal over a wider part of the globe. Limitations Operationally switching the single band By the early 1960s, the limitations of the single band arrays HRRS 4/4/1 array were becoming apparent as the BBC Before about 1970, it was an all-manual operation to developed a dual-band array where two adjacent bands effect slews, reversals and ‘A’-condition switching on the could be accommodated, typified by 41 and 49 m, often arrays. Technical Assistants were rostered for turns on used for transmissions to East European countries during the senders, the control room and the antennas. the Cold War. This arrangement saved real estate and permitted greater flexibility in transmission planning as well as for operational staff on the sites if arrays were damaged in severe weather. VMARS Member Dave Gallop G3LXQ was a member of the BBC Transmitter Scheduling Unit at Bush House and involved with the use of these older designs. Below is a commentary that neatly describes the theory at the time and relates to a later improvement in the feed system. G3LXQ writes, “I was never fully convinced by the traditional feed system for HRRS 4/4/1 arrays. Vertical power sharing between the dipoles did not follow the theory for much of the intended frequency range, particularly when the BBC liked using band-edge frequencies (out-of-band frequencies).