D.G.P.S. Survey Report of Chhattisgarh Road
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

List of Eklavya Model Residential Schools in India (As on 20.11.2020)
List of Eklavya Model Residential Schools in India (as on 20.11.2020) Sl. Year of State District Block/ Taluka Village/ Habitation Name of the School Status No. sanction 1 Andhra Pradesh East Godavari Y. Ramavaram P. Yerragonda EMRS Y Ramavaram 1998-99 Functional 2 Andhra Pradesh SPS Nellore Kodavalur Kodavalur EMRS Kodavalur 2003-04 Functional 3 Andhra Pradesh Prakasam Dornala Dornala EMRS Dornala 2010-11 Functional 4 Andhra Pradesh Visakhapatanam Gudem Kotha Veedhi Gudem Kotha Veedhi EMRS GK Veedhi 2010-11 Functional 5 Andhra Pradesh Chittoor Buchinaidu Kandriga Kanamanambedu EMRS Kandriga 2014-15 Functional 6 Andhra Pradesh East Godavari Maredumilli Maredumilli EMRS Maredumilli 2014-15 Functional 7 Andhra Pradesh SPS Nellore Ozili Ojili EMRS Ozili 2014-15 Functional 8 Andhra Pradesh Srikakulam Meliaputti Meliaputti EMRS Meliaputti 2014-15 Functional 9 Andhra Pradesh Srikakulam Bhamini Bhamini EMRS Bhamini 2014-15 Functional 10 Andhra Pradesh Visakhapatanam Munchingi Puttu Munchingiputtu EMRS Munchigaput 2014-15 Functional 11 Andhra Pradesh Visakhapatanam Dumbriguda Dumbriguda EMRS Dumbriguda 2014-15 Functional 12 Andhra Pradesh Vizianagaram Makkuva Panasabhadra EMRS Anasabhadra 2014-15 Functional 13 Andhra Pradesh Vizianagaram Kurupam Kurupam EMRS Kurupam 2014-15 Functional 14 Andhra Pradesh Vizianagaram Pachipenta Guruvinaidupeta EMRS Kotikapenta 2014-15 Functional 15 Andhra Pradesh West Godavari Buttayagudem Buttayagudem EMRS Buttayagudem 2018-19 Functional 16 Andhra Pradesh East Godavari Chintur Kunduru EMRS Chintoor 2018-19 Functional -

Raigarh, Chhattisgarh
District Profile Raigarh, Chhattisgarh Raigarh is a major district in the state of Chhattisgarh in India. The headquarters of the district is located in the city of Raigarh. The total area of the district is 7086 sq. km. Raigarh district is divided into 10 Tehsils/ CD Blocks: Raigarh, Pusaur, Baramkela, Kharsiya, Gharghoda, Tamnar, Lallunga, Dharamjaigarh, Sa- rangarh. DEMOGRAPHY As per Census 2011, the total population of Raigarh is 14,93,984 which accounts for 5.85 percent of the total population of State. The percentage of urban population in Raigarh is 16.49 percent, which is lower than the state average of 23.24 percent. Out of the total population there are 750,278 males and 743,706 females in the district. This gives a sex ratio of 991.24 females per 1000 males. The decadal growth rate of population in Chhattisgarh is 22.59 percent, while Raigarh reports a 18.02 percent decadal increase in the population. The district population density is 211 in 2011. The Scheduled Caste population in the district is 15 percent while Scheduled Tribe comprises one third of the total population. LITERACY The overall literacy rate of Raigarh district is 73.26 percent while the male & female literacy rate is 83.49 and 63.02 percent respectively. At the block level, a considerable variation is noticeable in male-female literacy rate. Dharamjaigarh has the lowest literacy rate 62.43 percent, with 74.09 per- cent men and 50.90 percent women being literate. Raigarh block, subse- quently, has the highest literacy rates– among both males and females. -

Dharamjaigarh Block, Raigarh DISTRICT, CHHATTISGARH
कᴂद्रीय भूमि जल बो셍ड जल संसाधन, नदी विकास और गंगा संरक्षण विभाग, जल शक्ति मंत्रालय भारत सरकार Central Ground Water Board Department of Water Resources, River Development and Ganga Rejuvenation, Ministry of Jal Shakti Government of India AQUIFER MAPPING AND MANAGEMENT OF GROUND WATER RESOURCES Dharamjaigarh block, Raigarh DISTRICT, CHHATTISGARH उत्तर मध्य छत्तीसग褼 क्षेत्र, रायपुर North Central Chhattisgarh Region, Raipur वछ जल - वछ भारत के ीय भूिम जल बोड mRrj e/; NRrhlx<+ {ks= f}rh; ry] ,y-ds- dkWaiksZjsV ,oa ykWftfLVd ikdZ] /kerjh jksM] MwejrjkÃZ] jk;iqj ¼NÙkhlx<+½&492015 Qksu&0771&2974405] QSDl&2974405 bZesy&[email protected] भारत सरकार Government of India जल शि मंालय Ministry of Jal Shakti जल संसाधन, नदी िवकास और गंगा संरण िवभाग Department of Water Resources, River Development & Ganga Rejuvenation के ीय भूिम जल बोड CENTRAL GROUND WATER BOARD Aquifer Mapping and Management Plan in Dharamjaigarh block, Raigarh District, Chhattisgarh By Sh. A K Biswal (Scientist-D) North Central Chhattisgarh Region Raipur 2020 Government of India Ministry of Jal Shakti Department of Water Resources, River Development & Ganga Rejuvenation CENTRAL GROUND WATER BOARD Aquifer Mapping and Management Plan in Dharamjaigarh block, Raigarh District, Chhattisgarh By Sh. A K Biswal (Scientist-D) Type of Study Officer engaged Data compilation, Data Gap Analysis & Sri S.Acharya, Scientist-D, (AAP-2015-16) Data Generation Data Interpretation, Integration, Aquifer Sri A. K. Biswal, Scientist-D Mapping, Management Plan & Report writing North Central Chhattisgarh Region Raipur 2020 BLOCK AT A GLANCE DHARAMJAIGARH BLOCK, RAIGARH DISTRICT, CHHATTISGARH 1. -
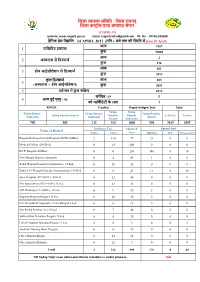
जिला स्वास्थ्य सजमजर् - जिला रायगढ़ जिला कन्ट्र ोल एण्ड कमाण्ड सेन्ट्र (COVID-19) Website: Email: [email protected] Ph
जिला स्वास्थ्य सजमजर् - जिला रायगढ़ जिला कन्ट्र ोल एण्ड कमाण्ड सेन्ट्र (COVID-19) website: www.raigarh.gov.in Email: [email protected] Ph. No. - 07762-232668 दैजनक प्रेस जवज्ञप्ति - 24 APRIL 2021 (राजि 8 बिे र्क की प्तथिजर् मᴂ from 01 April) आि 1007 1 पाजिजिव प्रकरण कु ल 11686 आि 2 2 अस्पर्ाल से जिथचाित कु ल 316 आि 461 3 होम आईसोलेशन से जिथचाित कु ल 3515 कु ल जिथचाित आि 463 4 (अस्पर्ाल + होम आईसोलेशन) कु ल 3831 5 वर्तमान मᴂ कु ल सजिय 8215 कोजवि -19 5 6 आि ई मृत्यु - 06 को-माजबतजििी के साि 1 RTPCR TrueNat Rapid Antigen Test Total Today Today Today Sample Today Sample Today Positive Today Positive Result Positive Sample Collecton Positive Collection Collection Result Result Collection 705 202 112 212 1800 593 2617 1007 Discharge Case Admitted Vacant bed Name of Hosital Today Total Case Normal ICU Oxygenated Raigarh Dedicated Covid Hospital (MCH)-100Bed 2 114 79 21 0 0 Medical College (200 Bed) 0 13 200 0 0 0 K.I.T. Raigarh- 400Bed 0 0 250 140 0 10 New Mangal bhawan, Sarangarh 0 4 49 1 0 0 Jindal Hospital Raigarh (Symptomatic) 25 Bed 0 58 25 0 0 0 Jindal CCC Raigarh Parsada (ASymptomatic) 90 Bed 0 0 43 11 0 36 Apex Hospital (ICU+HDU) 40 bed 0 22 40 0 0 0 Shri Balaji Metro (ICU+HDU) 35 bed 0 23 35 0 0 0 JMJ Morning (ICU+HDU) 20 bed 0 9 20 5 0 0 Rajpriya Hospital Raigarh 30 bed 0 20 30 0 0 0 Shiv Hospital & Diagnostic Center Raigarh 8 bed 0 0 15 0 0 0 Shri Radha Krishna Care 40 bed 0 7 40 0 0 0 Sidhheshwar Netralaya Raigarh 20 bed 0 0 20 0 0 0 Lokesh Hospital Borodipa Pussore12 bed 0 0 9 0 0 3 Sanjivani Nursing Home Raigarh 0 0 20 0 0 -
Published by Sampan Media Pvt. Ltd. for Chhattisgarh Tourism Board All Rights Reserved
Published by Sampan Media Pvt. Ltd. for Chhattisgarh Tourism Board All rights reserved. No part of this publication may be reproduced or transmitted in any form or by any means without the prior permission of the copyright owner. Details like telephone, fax numbers, opening hours, prices and travel information may change. The publisher is not responsible for error, if any. Copyright©2014 Chhattisgarh Tourism Board Published for Chhattisgarh Tourism Board by Sampan Media Pvt. Ltd. Regd. Office: 124, 3rd Floor, Shahpur Jat, Opp. Siri Fort Auditorium, New Delhi – 110049, Ph: 9560264447, [email protected] Contents Introducing Chhattisgarh 4 The Land and its History 5 Tribal Culture 16 Handicrafts 28 Cultural Traditions 39 Destinations 47 Raipur and Around 48 Bilaspur and Around 77 Bastar Division 104 National Parks and Sanctuaries 121 Practical Information 130 Introducing Chhattisgarh Chitrakote Fall The Land and its History hhattisgarh was a part of the state of Madhya Pradesh up till C2000, after which it was declared as a separate state with Raipur as the capital city. The state borders shares the states of Madhya Pradesh, Maharashtra, Andhra Pradesh, Odisha, Jharkhand and Uttar Pradesh. Located in central India, the state comprises of 27 districts. Chhattisgarh is endowed with rich cultural heritage and is a home of some of India’s ancient caves, waterfalls, The river side view temples, Buddhist sites, rock paintings, Chhattisgarh contains the wildlife and hill plateaus. source of one of the most important rivers of the South Historically Chhattisgarh shares Asian peninsula—the Mahanadi. its boundaries with many kingdoms. This river originates in a village The reason mentioned in the Imperial near Raipur. -

Ircon International Limited
IRCON INTERNATIONAL LIMITED DETAILED PROJECT REPORT‐CHHAL (CERL) CONSTRUCTION OF NEW COAL SIDING TAKING OFF FROM CHHAL STATION IN RAIGARH DISTRICT IN BILASPUR DIVISION OF SEC RAILWAY December ‐ 2018 Consultant HOWE ENGINEERING PROJECTS (INDIA) PVT. LTD. Office Address: Office No. 1003B, 10th Floor, BPTP Park, Centra, Sector‐30 NH‐8, Gurugram, Gurgaon, Haryana ‐ 122001 Telephone: 0124‐4740850, GST Regn. Number: 06AADCH4100N1ZS Registered Office: E‐102, Sanskar Appartment, Opp Karnavati Club, SG Highway, Satellite, Ahmedabad 380 015 Tel + 91 (79) 2555 6500, Fax + 91 (79) 2555 5603, www.howeindia.com CIN: U74140GJ2013PTC086504 Date: December 2018 Doc. No.: I‐527_IRCON_CERL_DPR_CHHAL Page 1 of 60 TABLE OF CONTENTS CHAPTER PAGE TITLE NO. NOS. 0 TABLE OF CONTENTS 1 to 1 I GENESIS OF THE PROPOSITION AND PROFILE OVERVIEW 2 to 11 OF THE ASSIGNMENT II PROJECT AT A GLANCE 12 to 16 III ANALYSIS & ASSESMENT OF COAL TRAFFIC 17 to 32 IV TOPOGRAPHY SURVEY 33 to 34 V CIVIL ENGINEERING (ALIGNMENT, BRIDGES & ROAD CROSSINGS AND OTHER 35 to 43 DETAILS) VI SYSTEM OF OPERATION 44 to 48 VII GEOTECHNICAL INVESTIGATION 49 to 49 VIII LAND PLANS 50 to 50 IX ELECTRICAL ENGINEERING 51 to 54 X SIGNAL AND TELECOMMUNICATION (S&T) ENGINEERING 55 to 55 XI MECHANICAL ENGINEERING 56 to 56 XII COST ESTIMATES 57 to 59 XIII LIST OF ANNEXURES 60 to 60 Detailed Project Report of Chhal (CERL) Date: December 2018 Doc. No.: I‐527_IRCON_CERL_DPR_CHHAL Page 2 of 60 CHAPTER ‐ 1: GENESIS OF THE PROPOSITION AND PROFILE OVERVIEW OF THE ASSIGNMENT INTRODUCTION: Bulk cargo, be it dry or liquid, like coal and crude oil play a crucial role in the economic development. -

Chapter – I Introduction
CHAPTER – I INTRODUCTION WHAT IS BIODIVERSITY: Biological diversity or “biodiversity” has been defined as: “The variability among living organisms from all sources including Inter alia, Terrestrial, Marine and other Aquatic Ecosystems and the Ecological Complexes of which they are part; this includes diversity within species, between species, and of Ecosystems”. Diversity within species (or genetic diversity) refers to variability in the functional units of heredity present in any material of plant, animal, microbial or other origin. Species diversity is used to describe the variety of species - whether wild or domesticated) within a geographical area. Estimates of the total number of species (defined as a population of organisms which are able to interbreed freely under natural conditions) range from 2 to 100 million, though less than 1.5 million have actually been described. Ecosystem diversity refers to the enormous variety of plant, animal and micro organism communities and ecological processes that make them function. In short, biodiversity refers to the variety of life on earth. This variety provides the building blocks to adapt to changing environmental conditions in the future. The conservation of biodiversity is the fundamental to achieve sustainable development. It provides flexibility and options for our current (and future) use of natural resources. About 80% of the population in Chhattisgarh lives in rural areas, and a large part of this population, depends directly or indirectly on natural resources. Conservation of biodiversity is crucial for the sustainability of sectors as diverse as agriculture, forestry, fisheries, wildlife, industry, health, tourism, commerce, irrigation and power. Development of Chhattisgarh in future, will depend on the foundation provided by live resources, and conservation of biodiversity will ensure that this foundation remains strong. -

Download 1.86 MB
Initial Environmental Examination January 2019 India: Chhattisgarh Road Connectivity Project Dharamjaygarh-Kapu Road Prepared by Public Works Department, Government of Chhattishgarh for the Asian Development Bank. CURRENCY EQUIVALENTS (as of of 31 December 2018) Currency unit = Indian rupees (Re/Rs) Re1.00 = $0.01408 $1.00 = Rs71.0008 ABBREVIATION AADT - Annual Average Daily Traffic AAQM - Ambient air quality monitoring ADB - Asian Development Bank ASI - Archaeological Survey of India BDL - Below detectable limit BGL - Below ground level BOD - Biochemical oxygen demand BOQ - Bill of quantity CGWA - Central Ground Water Authority CO - Carbon monoxide COD - Chemical oxygen demand CPCB - Central Pollution Control Board CSC - Construction Supervision Consultant DFO - Divisional Forest Officer DG - Diesel generating set DO - Dissolved oxygen DPR - Detailed project report E&S - Environment and social EA - Executing agency EAC - Expert Appraisal Committee EFP - Environmental Focal Person EHS - Environment Health and Safety EIA - Environmental impact assessment EMOP - Environmental monitoring plan EMP - Environmental management plan ESCAP - United Nations Economic and Social Commission for Asia and Pacific GHG - Greenhouse gas GIS - Geographical information system GOI - Government of India GRC - Grievance redress committee GRM - Grievance redress mechanism HFL - Highest flood level IA - Implementing Agency IEE - Initial Environmental Examination IMD - Indian Meteorological Department IRC - Indian Road Congress IUCN - International Union for Conservation -

Ircon International Limited
IRCON INTERNATIONAL LIMITED DETAILED PROJECT REPORT- DHARMJAIGARH (SECL) CONSTRUCTION OF NEW COAL SIDING TAKING OFF FROM DHARMJAIGARH STATION IN RAIGARH DISTRICT IN BILASPUR DIVISION OF SEC RAILWAY JANUARY - 2019 Consultant HOWE ENGINEERING PROJECTS (INDIA) PVT. LTD. Office Address: Office No. 1003B, 10th Floor, BPTP Park, Centra, Sector-30 NH-8, Gurugram, Gurgaon, Haryana - 122001 Telephone: 0124-4740850, GST Regn. Number: 06AADCH4100N1ZS Registered Office: E-102, Sanskar Appartment, Opp Karnavati Club, SG Highway, Satellite, Ahmedabad 380 015 Tel + 91 (79) 2555 6500, Fax + 91 (79) 2555 5603, www.howeindia.com CIN: U74140GJ2013PTC086504 Date: JANUARY 2019 Doc. No.: I-527_IRCON_SECL_DPR_DHARMJAIGARH Page 1 of 62 TABLE OF CONTENTS CHAPTER PAGE TITLE NO. NOS. 0 TABLE OF CONTENTS 1 to 1 I GENESIS OF THE PROPOSITION AND PROFILE 2 to 10 OVERVIEW OF THE ASSIGNMENT II PROJECT AT A GLANCE 11 to 15 III ANALYSIS & ASSESMENT OF COAL TRAFFIC 16 to 32 IV TOPOGRAPHY SURVEY 33 to 34 V CIVIL ENGINEERING (ALIGNMENT, BRIDGES & ROAD CROSSINGS AND 35 to 43 OTHER DETAILS) VI SYSTEM OF OPERATION 44 to 48 VII GEOTECHNICAL INVESTIGATION 49 to 49 VIII LAND PLANS 50 to 50 IX ELECTRICAL ENGINEERING 51 to 55 X SIGNAL AND TELECOMMUNICATION (S&T) 56 to 57 ENGINEERING XI MECHANICAL ENGINEERING 58 to 58 XII COST ESTIMATES 59 to 61 XIII LIST OF ANNEXURES 62 to 62 Detailed Project Report of Dharamjaigarh (SECL) Date: JANUARY 2019 Doc. No.: I-527_IRCON_SECL_DPR_DHARMJAIGARH Page 2 of 62 CHAPTER - 1: GENESIS OF THE PROPOSITION AND PROFILE OVERVIEW OF THE ASSIGNMENT INTRODUCTION: Bulk cargo, be it dry or liquid, like coal and crude oil play a crucial role in the economic development. -

FOREST RESOURCES of RAIGARH DISTRICT of MADHYA PRADESH Lckhcl*,:S.9~) -=-= ___
FOREST RESOURCES OF RAIGARH DISTRICT OF MADHYA PRADESH LCkhCL*,:s.9~) -=-= ___...,. FOREST SURVEY OF INDIA. CENTRAL ZONE N.A.GPUR 1989 fOREST RESOURCES OF RAIGARH DISTRICT OF MADHYA PRADESH (~ VtVt~~·s~~l.\..) FOREST SURVEY OF INDIA CENTRAL ZONE NAGPUR 1989 India's forest wealth is diminishing very fast due to the pressures of population. It has become necessary to have an accurate picture of the remaining resources and therefore. Central Zone of Forest Survey of India carried out inventory of forest resources of Raigarh district of M~lhya . Pradesh during March to June, 1985. This report is essentil~lly based on the data collected during the survey. It covers two forest divisions in Raigarh district namely Raigarh forest division and Jashpur forest division. These forests formed a part of former princely states of Raigarh. Udaipur, Sarangarh and Jashpur. These forests suffered badly during the long period under princely rule due to lack of scientific forest management and proper protection. These conditions have changed now and systematic forest management has been introduced in these areas after merger of the princely states and there is considerable improvement in forest stock during the last decade as revealed from the survey done by us in 1985 and the one done by the State forest department in 1975-77. On the basis of the inventory carried out by us the tota1 growing stock in the district is approximately 2.926 x 10 6 cu.m. which works out to 60.098 cU.m. per hectare for 4868.39 sq.km. vegetated area of the district. -

Barra Block Summary Kharsia Is the Nearest Railhead on the Howrah-Mumbai Line of South-East Central Railway. Barra Block Is Loca
Barra Block Summary PART A Sr. No. Features Details 1. Location Coal Block Barra 22° 6' 38" N-22° 10' 43" N (Provisional) Latitude 82° 59' 17" E-83° 5' 17" E (Provisional) Longitude Topo Sheet No. 64 J/16 & 64 N/4 Coalfield Mand-Raigarh Villages Barra,Jobi villages Tehsil/Taluka Kharsia District Raigarh State Chhattisgarh Connectivity with 2. Block Kharsia is the nearest railhead on the Howrah-Mumbai line of South-East Nearest Rail Head Central Railway. Barra block is located about 16 km north of Kharsia town, the tehsil town Road and can be approached through Kharsia-Dharamjaigarh State Highway No. 22. Airport 3. Area 24.28 sq km Geological Block Area (As per shape file. Refer note below) 4.37 sq.km (As per FSI Map) Forest Area Non-Forest Area 19.91 sq,km Climate and 4. Topography Average Annual 1500mm Rainfall Temperature (Min. — 70C during December to 480C in the month of May Max.) Local Surface Dom Nala flows in the south eastern part of the block Drainage Channels The Mand river flowing from north-west to south-east direction on the Rivers eastern boundary of the block. 5. Exploration Status Partially explored (Under regional exploration through promotional scheme) Exploration Agency MECL Total Number of 16 boreholes & 6458 m ( as on 01.01.2021) Boreholes with meterage 0.65 boreholes per sq km ( as on 01.01.2021) Borehole Density The dip of the strata varies from 8° to 15° show north-easterly to easterly General Dip of Seams dip. General Strike The general strike is NW-SE Direction Faults 6. -

List of Eklavya Model Residential Schools in India (As on 22.02.2021)
List of Eklavya Model Residential Schools in India (as on 22.02.2021) Sl. Year of State District Block/ Taluka Village/ Habitation Name of the School Status No. sanction 1 Andhra Pradesh East Godavari Y. Ramavaram P. Yerragonda EMRS Y Ramavaram 1998-99 Functional 2 Andhra Pradesh SPS Nellore Kodavalur Kodavalur EMRS Kodavalur 2003-04 Functional 3 Andhra Pradesh Prakasam Dornala Dornala EMRS Dornala 2010-11 Functional 4 Andhra Pradesh Visakhapatanam Gudem Kotha Veedhi Gudem Kotha Veedhi EMRS GK Veedhi 2010-11 Functional 5 Andhra Pradesh Chittoor Buchinaidu Kandriga Kanamanambedu EMRS Kandriga 2014-15 Functional 6 Andhra Pradesh East Godavari Maredumilli Maredumilli EMRS Maredumilli 2014-15 Functional 7 Andhra Pradesh SPS Nellore Ozili Ojili EMRS Ozili 2014-15 Functional 8 Andhra Pradesh Srikakulam Meliaputti Meliaputti EMRS Meliaputti 2014-15 Functional 9 Andhra Pradesh Srikakulam Bhamini Bhamini EMRS Bhamini 2014-15 Functional 10 Andhra Pradesh Visakhapatanam Munchingi Puttu Munchingiputtu EMRS Munchigaput 2014-15 Functional 11 Andhra Pradesh Visakhapatanam Dumbriguda Dumbriguda EMRS Dumbriguda 2014-15 Functional 12 Andhra Pradesh Vizianagaram Makkuva Panasabhadra EMRS Anasabhadra 2014-15 Functional 13 Andhra Pradesh Vizianagaram Kurupam Kurupam EMRS Kurupam 2014-15 Functional 14 Andhra Pradesh Vizianagaram Pachipenta Guruvinaidupeta EMRS Kotikapenta 2014-15 Functional 15 Andhra Pradesh West Godavari Buttayagudem Buttayagudem EMRS Buttayagudem 2018-19 Functional 16 Andhra Pradesh East Godavari Chintur Kunduru EMRS Chintoor 2018-19 Functional