Дзжйиз ¡ ¢ ; Parametric Form: ¦ ! " ¢$ #%¦ & ' ¡ ¦ ! )(. a BDC'e ¦0 1 4 ¢$ F
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Osculating Circumference Problem
THE OSCULATING CIRCUMFERENCE PROBLEM School I.S.I.S.S. M. Casagrande Pieve di Soligo, Treviso Italy Students Silvia Micheletto (I) Azzurra Soa Pizzolotto (IV) Luca Barisan (II) Simona Sota (IV) Gaia Barella (IV) Paolo Barisan (V) Marco Casagrande (IV) Anna De Biasi (V) Chiara De Rosso (IV) Silvia Giovani (V) Maddalena Favaro (IV) Klara Metaliu (V) Teachers Fabio Breda Francesco Maria Cardano Davide Palma Francesco Zampieri Researcher Alberto Zanardo, University of Padova Italy Year 2019/2020 The osculating circumference problem ISISS M. Casagrande, Pieve di Soligo, Treviso Italy Abstract The aim of the article is to study the osculating circumference i.e. the circumference which best approximates the graph of a curve at one of its points. We will dene this circumference and we will describe several methods to nd it. Finally we will introduce the notions of round points and crossing points, points of the curve where the circumference has interesting properties. ??? Contents Introduction 3 1 The osculating circumference 5 1.1 Particular cases: the formulas cannot be applied . 9 1.2 Curvature . 14 2 Round points 15 3 Beyond round points 22 3.1 Crossing points . 23 4 Osculating circumference of a conic section 25 4.1 The rst method . 25 4.2 The second method . 26 References 31 2 The osculating circumference problem ISISS M. Casagrande, Pieve di Soligo, Treviso Italy Introduction Our research was born from an analytic geometry problem studied during the third year of high school. The problem. Let P : y = x2 be a parabola and A and B two points of the curve symmetrical about the axis of the parabola. -

Plotting Graphs of Parametric Equations
Parametric Curve Plotter This Java Applet plots the graph of various primary curves described by parametric equations, and the graphs of some of the auxiliary curves associ- ated with the primary curves, such as the evolute, involute, parallel, pedal, and reciprocal curves. It has been tested on Netscape 3.0, 4.04, and 4.05, Internet Explorer 4.04, and on the Hot Java browser. It has not yet been run through the official Java compilers from Sun, but this is imminent. It seems to work best on Netscape 4.04. There are problems with Netscape 4.05 and it should be avoided until fixed. The applet was developed on a 200 MHz Pentium MMX system at 1024×768 resolution. (Cost: $4000 in March, 1997. Replacement cost: $695 in June, 1998, if you can find one this slow on sale!) For various reasons, it runs extremely slowly on Macintoshes, and slowly on Sun Sparc stations. The curves should move as quickly as Roadrunner cartoons: for a benchmark, check out the circular trigonometric diagrams on my Java page. This applet was mainly done as an exercise in Java programming leading up to more serious interactive animations in three-dimensional graphics, so no attempt was made to be comprehensive. Those who wish to see much more comprehensive sets of curves should look at: http : ==www − groups:dcs:st − and:ac:uk= ∼ history=Java= http : ==www:best:com= ∼ xah=SpecialP laneCurve dir=specialP laneCurves:html http : ==www:astro:virginia:edu= ∼ eww6n=math=math0:html Disclaimer: Like all computer graphics systems used to illustrate mathematical con- cepts, it cannot be error-free. -

Differential Geometry
Differential Geometry J.B. Cooper 1995 Inhaltsverzeichnis 1 CURVES AND SURFACES—INFORMAL DISCUSSION 2 1.1 Surfaces ................................ 13 2 CURVES IN THE PLANE 16 3 CURVES IN SPACE 29 4 CONSTRUCTION OF CURVES 35 5 SURFACES IN SPACE 41 6 DIFFERENTIABLEMANIFOLDS 59 6.1 Riemannmanifolds .......................... 69 1 1 CURVES AND SURFACES—INFORMAL DISCUSSION We begin with an informal discussion of curves and surfaces, concentrating on methods of describing them. We shall illustrate these with examples of classical curves and surfaces which, we hope, will give more content to the material of the following chapters. In these, we will bring a more rigorous approach. Curves in R2 are usually specified in one of two ways, the direct or parametric representation and the implicit representation. For example, straight lines have a direct representation as tx + (1 t)y : t R { − ∈ } i.e. as the range of the function φ : t tx + (1 t)y → − (here x and y are distinct points on the line) and an implicit representation: (ξ ,ξ ): aξ + bξ + c =0 { 1 2 1 2 } (where a2 + b2 = 0) as the zero set of the function f(ξ ,ξ )= aξ + bξ c. 1 2 1 2 − Similarly, the unit circle has a direct representation (cos t, sin t): t [0, 2π[ { ∈ } as the range of the function t (cos t, sin t) and an implicit representation x : 2 2 → 2 2 { ξ1 + ξ2 =1 as the set of zeros of the function f(x)= ξ1 + ξ2 1. We see from} these examples that the direct representation− displays the curve as the image of a suitable function from R (or a subset thereof, usually an in- terval) into two dimensional space, R2. -

Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-Space E3
Fundamentals of Contemporary Mathematical Sciences (2020) 1(2) 63 { 70 Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-space E3 Abdullah Yıldırım 1,∗ Feryat Kaya 2 1 Harran University, Faculty of Arts and Sciences, Department of Mathematics S¸anlıurfa, T¨urkiye 2 S¸ehit Abdulkadir O˘guzAnatolian Imam Hatip High School S¸anlıurfa, T¨urkiye, [email protected] Received: 29 February 2020 Accepted: 29 June 2020 Abstract: In this study, evolute-involute curves are researched. Characterization of evolute-involute curves lying on the surface are examined according to Darboux frame and some curves are obtained. Keywords: Curve, surface, geodesic, curvature, frame. 1. Introduction The interest of special curves has increased recently. Some of these are associated curves. They are curves where one of the Frenet vectors at opposite points is linearly dependent to the other curve. One of the best examples of these curves is the evolute-involute partner curves. An involute thought known to have been used in his optical work came up in 1658 by C. Huygens. C. Huygens discovered involute curves while trying to make more accurate measurement studies [5]. Many researches have been conducted about evolute-involute partner curves. Some of them conducted recently are Bilici and C¸alı¸skan [4], Ozyılmaz¨ and Yılmaz [9], As and Sarıo˘glugil[2]. Bekta¸sand Y¨uceconsider the notion of the involute-evolute curves lying on the surfaces for a special situation. They determine the special involute-evolute partner D−curves in E3: By using the Darboux frame of the curves they obtain the necessary and sufficient conditions between κg , ∗ − ∗ ∗ τg; κn and κn for a curve to be the special involute partner D curve. -

Computer-Aided Design and Kinematic Simulation of Huygens's
applied sciences Article Computer-Aided Design and Kinematic Simulation of Huygens’s Pendulum Clock Gloria Del Río-Cidoncha 1, José Ignacio Rojas-Sola 2,* and Francisco Javier González-Cabanes 3 1 Department of Engineering Graphics, University of Seville, 41092 Seville, Spain; [email protected] 2 Department of Engineering Graphics, Design, and Projects, University of Jaen, 23071 Jaen, Spain 3 University of Seville, 41092 Seville, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-953-212452 Received: 25 November 2019; Accepted: 9 January 2020; Published: 10 January 2020 Abstract: This article presents both the three-dimensional modelling of the isochronous pendulum clock and the simulation of its movement, as designed by the Dutch physicist, mathematician, and astronomer Christiaan Huygens, and published in 1673. This invention was chosen for this research not only due to the major technological advance that it represented as the first reliable meter of time, but also for its historical interest, since this timepiece embodied the theory of pendular movement enunciated by Huygens, which remains in force today. This 3D modelling is based on the information provided in the only plan of assembly found as an illustration in the book Horologium Oscillatorium, whereby each of its pieces has been sized and modelled, its final assembly has been carried out, and its operation has been correctly verified by means of CATIA V5 software. Likewise, the kinematic simulation of the pendulum has been carried out, following the approximation of the string by a simple chain of seven links as a composite pendulum. The results have demonstrated the exactitude of the clock. -

The Pope's Rhinoceros and Quantum Mechanics
Bowling Green State University ScholarWorks@BGSU Honors Projects Honors College Spring 4-30-2018 The Pope's Rhinoceros and Quantum Mechanics Michael Gulas [email protected] Follow this and additional works at: https://scholarworks.bgsu.edu/honorsprojects Part of the Mathematics Commons, Ordinary Differential Equations and Applied Dynamics Commons, Other Applied Mathematics Commons, Partial Differential Equations Commons, and the Physics Commons Repository Citation Gulas, Michael, "The Pope's Rhinoceros and Quantum Mechanics" (2018). Honors Projects. 343. https://scholarworks.bgsu.edu/honorsprojects/343 This work is brought to you for free and open access by the Honors College at ScholarWorks@BGSU. It has been accepted for inclusion in Honors Projects by an authorized administrator of ScholarWorks@BGSU. The Pope’s Rhinoceros and Quantum Mechanics Michael Gulas Honors Project Submitted to the Honors College at Bowling Green State University in partial fulfillment of the requirements for graduation with University Honors May 2018 Dr. Steven Seubert Dept. of Mathematics and Statistics, Advisor Dr. Marco Nardone Dept. of Physics and Astronomy, Advisor Contents 1 Abstract 5 2 Classical Mechanics7 2.1 Brachistochrone....................................... 7 2.2 Laplace Transforms..................................... 10 2.2.1 Convolution..................................... 14 2.2.2 Laplace Transform Table.............................. 15 2.2.3 Inverse Laplace Transforms ............................ 15 2.3 Solving Differential Equations Using Laplace -

Gottfried Wilhelm Leibnitz (Or Leibniz) Was Born at Leipzig on June 21 (O.S.), 1646, and Died in Hanover on November 14, 1716. H
Gottfried Wilhelm Leibnitz (or Leibniz) was born at Leipzig on June 21 (O.S.), 1646, and died in Hanover on November 14, 1716. His father died before he was six, and the teaching at the school to which he was then sent was inefficient, but his industry triumphed over all difficulties; by the time he was twelve he had taught himself to read Latin easily, and had begun Greek; and before he was twenty he had mastered the ordinary text-books on mathematics, philosophy, theology and law. Refused the degree of doctor of laws at Leipzig by those who were jealous of his youth and learning, he moved to Nuremberg. An essay which there wrote on the study of law was dedicated to the Elector of Mainz, and led to his appointment by the elector on a commission for the revision of some statutes, from which he was subsequently promoted to the diplomatic service. In the latter capacity he supported (unsuccessfully) the claims of the German candidate for the crown of Poland. The violent seizure of various small places in Alsace in 1670 excited universal alarm in Germany as to the designs of Louis XIV.; and Leibnitz drew up a scheme by which it was proposed to offer German co-operation, if France liked to take Egypt, and use the possessions of that country as a basis for attack against Holland in Asia, provided France would agree to leave Germany undisturbed. This bears a curious resemblance to the similar plan by which Napoleon I. proposed to attack England. In 1672 Leibnitz went to Paris on the invitation of the French government to explain the details of the scheme, but nothing came of it. -

The Fractal Theory of the Saturn Ring
523.46/.481 THE FRACTAL THEORY OF THE SATURN RING M.I.Zelikin Abstract The true reason for partition of the Saturn ring as well as rings of other plan- ets into great many of sub-rings is found. This reason is the theorem of Zelikin- Lokutsievskiy-Hildebrand about fractal structure of solutions to generic piece-wise smooth Hamiltonian systems. The instability of two-dimensional model of rings with continues surface density of particles distribution is proved both for Newtonian and for Boltzmann equations. We do not claim that we have solved the problem of stability of Saturn ring. We rather put questions and suggest some ideas and means for researches. 1 Introduction Up to the middle of XX century the astronomy went hand in hand with mathematics. So, it is no wonder that such seemingly purely astronomical problems as figures of equilibrium for rotating, gravitating liquids or the stability of Saturn Ring came to the attention of the most part of outstanding mathematicians. It will be suffice to mention Galilei, Huygens, Newton, Laplace, Maclaurin, Maupertuis, Clairaut, d’Alembert, Legendre, Liouville, Ja- cobi, Riemann, Poincar´e, Chebyshev, Lyapunov, Cartan and numerous others (see, for example, [1]). It is pertinent to recall the out of sight discussion between Poincar´eand Lyapunov regarding figures of equilibrium for rotating, gravitating liquids. Poincar´e, who obtained his results using not so rigorous reasoning and often by simple analogy, wrote, “It is possible to make many objections, but the same rigor as in pure analysis is not de- manded in mechanics”. Lyapunov had entirely different position: “It is impermissible to use doubtful reasonings when solving a problem in mechanics or physics (it is the same) if it is formulated quite definitely as a mathematical one. -

The Cycloid Scott Morrison
The cycloid Scott Morrison “The time has come”, the old man said, “to talk of many things: Of tangents, cusps and evolutes, of curves and rolling rings, and why the cycloid’s tautochrone, and pendulums on strings.” October 1997 1 Everyone is well aware of the fact that pendulums are used to keep time in old clocks, and most would be aware that this is because even as the pendu- lum loses energy, and winds down, it still keeps time fairly well. It should be clear from the outset that a pendulum is basically an object moving back and forth tracing out a circle; hence, we can ignore the string or shaft, or whatever, that supports the bob, and only consider the circular motion of the bob, driven by gravity. It’s important to notice now that the angle the tangent to the circle makes with the horizontal is the same as the angle the line from the bob to the centre makes with the vertical. The force on the bob at any moment is propor- tional to the sine of the angle at which the bob is currently moving. The net force is also directed perpendicular to the string, that is, in the instantaneous direction of motion. Because this force only changes the angle of the bob, and not the radius of the movement (a pendulum bob is always the same distance from its fixed point), we can write: θθ&& ∝sin Now, if θ is always small, which means the pendulum isn’t moving much, then sinθθ≈. This is very useful, as it lets us claim: θθ&& ∝ which tells us we have simple harmonic motion going on. -

Geometry in the Age of Enlightenment
Geometry in the Age of Enlightenment Raymond O. Wells, Jr. ∗ July 2, 2015 Contents 1 Introduction 1 2 Algebraic Geometry 3 2.1 Algebraic Curves of Degree Two: Descartes and Fermat . 5 2.2 Algebraic Curves of Degree Three: Newton and Euler . 11 3 Differential Geometry 13 3.1 Curvature of curves in the plane . 17 3.2 Curvature of curves in space . 26 3.3 Curvature of a surface in space: Euler in 1767 . 28 4 Conclusion 30 1 Introduction The Age of Enlightenment is a term that refers to a time of dramatic changes in western society in the arts, in science, in political thinking, and, in particular, in philosophical discourse. It is generally recognized as being the period from the mid 17th century to the latter part of the 18th century. It was a successor to the renaissance and reformation periods and was followed by what is termed the romanticism of the 19th century. In his book A History of Western Philosophy [25] Bertrand Russell (1872{1970) gives a very lucid description of this time arXiv:1507.00060v1 [math.HO] 30 Jun 2015 period in intellectual history, especially in Book III, Chapter VI{Chapter XVII. He singles out Ren´eDescartes as being the founder of the era of new philosophy in 1637 and continues to describe other philosophers who also made significant contributions to mathematics as well, such as Newton and Leibniz. This time of intellectual fervor included literature (e.g. Voltaire), music and the world of visual arts as well. One of the most significant developments was perhaps in the political world: here the absolutism of the church and of the monarchies ∗Jacobs University Bremen; University of Colorado at Boulder; [email protected] 1 were questioned by the political philosophers of this era, ushering in the Glo- rious Revolution in England (1689), the American Revolution (1776), and the bloody French Revolution (1789). -

A Quick and Dirty Introduction to Differential Geometry
CHAPTER 2 A Quick and Dirty Introduction to Differential Geometry 2.1. The Geometry of Surfaces There are many ways to think about the geometry of a surface (using charts, for instance) but here’s a picture that is well-suited to the way we work with surfaces in the discrete setting. Consider a little patch of material floating in space, as depicted below. Its geometry can be described via a map f : M R3 from a region M in the Euclidean plane R2 to a subset f (M) of R3: ! f N df(X) f (M) X M The differential of such a map, denoted by df , tells us how to map a vector X in the plane to the corresponding vector df(X) on the surface. Loosely speaking, imagine that M is a rubber sheet and X is a little black line segment drawn on M. As we stretch and deform M into f (M), the segment X also gets stretched and deformed into a different segment, which we call df(X). Later on we can talk about how to explicitly express df(X) in coordinates and so on, but it’s important to realize that fundamentally there’s nothing deeper to know about the differential than the picture you see here—the differential simply tells you how to stretch out or “push forward” vectors as you go from one space to another. For example, the length of a tangent vector X pushed forward by f can be expressed as df(X) df(X), · q where is the standard inner product (a.k.a. -
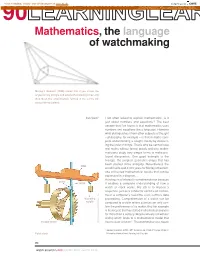
Mathematics, the Language of Watchmaking
View metadata, citation and similar papers at core.ac.uk brought to you by CORE 90LEARNINGprovidedL by Infoscience E- École polytechniqueA fédérale de LausanneRNINGLEARNINGLEARNING Mathematics, the language of watchmaking Morley’s theorem (1898) states that if you trisect the angles of any triangle and extend the trisecting lines until they meet, the small triangle formed in the centre will always be equilateral. Ilan Vardi 1 I am often asked to explain mathematics; is it just about numbers and equations? The best answer that I’ve found is that mathematics uses numbers and equations like a language. However what distinguishes it from other subjects of thought – philosophy, for example – is that in maths com- plete understanding is sought, mostly by discover- ing the order in things. That is why we cannot have real maths without formal proofs and why mathe- maticians study very simple forms to make pro- found discoveries. One good example is the triangle, the simplest geometric shape that has been studied since antiquity. Nevertheless the foliot world had to wait 2,000 years for Morley’s theorem, one of the few mathematical results that can be expressed in a diagram. Horology is of interest to a mathematician because pallet verge it enables a complete understanding of how a watch or clock works. His job is to impose a sequence, just as a conductor controls an orches- tra or a computer’s real-time clock controls data regulating processing. Comprehension of a watch can be weight compared to a violin where science can only con- firm the preferences of its maker.