First-Order Induction of Patterns in Chess
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Preparation of Papers for R-ICT 2007
Chess Puzzle Mate in N-Moves Solver with Branch and Bound Algorithm Ryan Ignatius Hadiwijaya / 13511070 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung, Jl. Ganesha 10 Bandung 40132, Indonesia [email protected] Abstract—Chess is popular game played by many people 1. Any player checkmate the opponent. If this occur, in the world. Aside from the normal chess game, there is a then that player will win and the opponent will special board configuration that made chess puzzle. Chess lose. puzzle has special objective, and one of that objective is to 2. Any player resign / give up. If this occur, then that checkmate the opponent within specifically number of moves. To solve that kind of chess puzzle, branch and bound player is lose. algorithm can be used for choosing moves to checkmate the 3. Draw. Draw occur on any of the following case : opponent. With good heuristics, the algorithm will solve a. Stalemate. Stalemate occur when player doesn‟t chess puzzle effectively and efficiently. have any legal moves in his/her turn and his/her king isn‟t in checked. Index Terms—branch and bound, chess, problem solving, b. Both players agree to draw. puzzle. c. There are not enough pieces on the board to force a checkmate. d. Exact same position is repeated 3 times I. INTRODUCTION e. Fifty consecutive moves with neither player has Chess is a board game played between two players on moved a pawn or captured a piece. opposite sides of board containing 64 squares of alternating colors. -

Proposal to Encode Heterodox Chess Symbols in the UCS Source: Garth Wallace Status: Individual Contribution Date: 2016-10-25
Title: Proposal to Encode Heterodox Chess Symbols in the UCS Source: Garth Wallace Status: Individual Contribution Date: 2016-10-25 Introduction The UCS contains symbols for the game of chess in the Miscellaneous Symbols block. These are used in figurine notation, a common variation on algebraic notation in which pieces are represented in running text using the same symbols as are found in diagrams. While the symbols already encoded in Unicode are sufficient for use in the orthodox game, they are insufficient for many chess problems and variant games, which make use of extended sets. 1. Fairy chess problems The presentation of chess positions as puzzles to be solved predates the existence of the modern game, dating back to the mansūbāt composed for shatranj, the Muslim predecessor of chess. In modern chess problems, a position is provided along with a stipulation such as “white to move and mate in two”, and the solver is tasked with finding a move (called a “key”) that satisfies the stipulation regardless of a hypothetical opposing player’s moves in response. These solutions are given in the same notation as lines of play in over-the-board games: typically algebraic notation, using abbreviations for the names of pieces, or figurine algebraic notation. Problem composers have not limited themselves to the materials of the conventional game, but have experimented with different board sizes and geometries, altered rules, goals other than checkmate, and different pieces. Problems that diverge from the standard game comprise a genre called “fairy chess”. Thomas Rayner Dawson, known as the “father of fairy chess”, pop- ularized the genre in the early 20th century. -

Chess-Training-Guide.Pdf
Q Chess Training Guide K for Teachers and Parents Created by Grandmaster Susan Polgar U.S. Chess Hall of Fame Inductee President and Founder of the Susan Polgar Foundation Director of SPICE (Susan Polgar Institute for Chess Excellence) at Webster University FIDE Senior Chess Trainer 2006 Women’s World Chess Cup Champion Winner of 4 Women’s World Chess Championships The only World Champion in history to win the Triple-Crown (Blitz, Rapid and Classical) 12 Olympic Medals (5 Gold, 4 Silver, 3 Bronze) 3-time US Open Blitz Champion #1 ranked woman player in the United States Ranked #1 in the world at age 15 and in the top 3 for about 25 consecutive years 1st woman in history to qualify for the Men’s World Championship 1st woman in history to earn the Grandmaster title 1st woman in history to coach a Men's Division I team to 7 consecutive Final Four Championships 1st woman in history to coach the #1 ranked Men's Division I team in the nation pnlrqk KQRLNP Get Smart! Play Chess! www.ChessDailyNews.com www.twitter.com/SusanPolgar www.facebook.com/SusanPolgarChess www.instagram.com/SusanPolgarChess www.SusanPolgar.com www.SusanPolgarFoundation.org SPF Chess Training Program for Teachers © Page 1 7/2/2019 Lesson 1 Lesson goals: Excite kids about the fun game of chess Relate the cool history of chess Incorporate chess with education: Learning about India and Persia Incorporate chess with education: Learning about the chess board and its coordinates Who invented chess and why? Talk about India / Persia – connects to Geography Tell the story of “seed”. -

Should Chess Players Learn Computer Security?
1 Should Chess Players Learn Computer Security? Gildas Avoine, Cedric´ Lauradoux, Rolando Trujillo-Rasua F Abstract—The main concern of chess referees is to prevent are indeed playing against each other, instead of players from biasing the outcome of the game by either collud- playing against a little girl as one’s would expect. ing or receiving external advice. Preventing third parties from Conway’s work on the chess grandmaster prob- interfering in a game is challenging given that communication lem was pursued and extended to authentication technologies are steadily improved and miniaturized. Chess protocols by Desmedt, Goutier and Bengio [3] in or- actually faces similar threats to those already encountered in der to break the Feige-Fiat-Shamir protocol [4]. The computer security. We describe chess frauds and link them to their analogues in the digital world. Based on these transpo- attack was called mafia fraud, as a reference to the sitions, we advocate for a set of countermeasures to enforce famous Shamir’s claim: “I can go to a mafia-owned fairness in chess. store a million times and they will not be able to misrepresent themselves as me.” Desmedt et al. Index Terms—Security, Chess, Fraud. proved that Shamir was wrong via a simple appli- cation of Conway’s chess grandmaster problem to authentication protocols. Since then, this attack has 1 INTRODUCTION been used in various domains such as contactless Chess still fascinates generations of computer sci- credit cards, electronic passports, vehicle keyless entists. Many great researchers such as John von remote systems, and wireless sensor networks. -
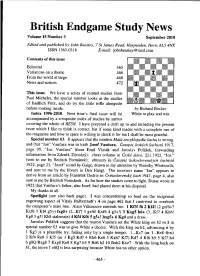
British Endgame Study News Volume 15 Number 3 Septernber 2010
British Endgame Study News Volume 15 Number 3 Septernber 2010 Edited and. published by John Beasley, 7 St James Road, Harpenden, Herts AL5 4NX ISSN 1363-0318 E-mdil: [email protected] Contents of this issue Editorial 465 Variations on a theme 466 From the world at large 468 News and notices 4'72 This issue- We have a series of related studies from Paul Michelet, the special number looks at the studies of Jirdfich Fritz, and do try the litde trifle atongside before looking inside, by Richard Becker Index 1996-2010. Next time's final issue will be White to play and win accompanied by a composite index of studies by author covering the whole of BESN. I have prepare.d a draft up to and including the present issue which I like to think is conect, but if some kind reader with a complete run of lhe magazine and time to spare is willing to check it for me I shall be most grateful_ Special number 63. It appears that the modetn Mahi encyklopedie.im,a is wrong, and fhat "Jan" Vaniura was in truth Josef Vaniura. Casopis iesbjch iachisti 1911, page 95, "Jos. Vandura" (from Emil Vlasdk and Jaroslav pol6iek, forwarding information from ZdenEk Zdvodnj); chess column in ieskl s/ovo,2Z.i.l922,..los:' (sent to me by Bedrich Formdnek)l obituary in Casopis ieskoslovenskjch iachisttit 1922, pnge 2l, "losef' (ciied by caige, drawn ro my anenrion by Timorhy Whitworrh, and sent to me by the library in Den Haag), The incorrect rlamc "Jan,' appears to derive from an article by FrantiSek Dedrle in Ceskoslovensky iach 1947. -

Usborne Chess Puzzle Answers – Level 2 to Print out This Answer Sheet, Click on ‘File’ and Then ‘Print’ in the Menu at the Top of Your Browser
Usborne Chess Puzzle Answers – level 2 To print out this answer sheet, click on ‘File’ and then ‘Print’ in the menu at the top of your browser. 1. Black should play 1…Bc8, so the Bishop covers the crucial a6–c8 diagonal and stops any of White’s Pawns from advancing. 2. 1…Be2+ forks the King and the Knight.When the King moves out of check, Black can take the Knight. 3.The best move is 1.Ra5+, which will capture the Rook on h5 after the King moves out of check. 1.Rxa6 wins only a Pawn and 1.Re2+ captures the e8 Knight with a skewer attack. 4. 1.Qg7++. Note that if White plays 1.Qa8+, Black blocks with 1…Bf8 and the game continues. 5. 1.Bf6++. 6. 1…Nd3++.The Pawn on e2 is pinned by the black Queen so the white King is trapped in a smothered mate. 7. 1…Nh3+ forces White to play 2.Kh1. Black can then play 2…Bb7++. 8. Black can play 1…Nf3+, shielding the King from check, and at the same time, checking White so that White’s next move, 2.Kh1, is forced. (White’s Queen is pinned by the Rook on a1 and cannot capture the Knight.) Black can now play 2…Rxh2++. 9. If Black plays 1…Bh3,White cannot prevent 2…Qg2++. 10. 1…Nf3+, 2.Kh1 Qxh2++ or 1…Nh3+, 2.Kh1 Bxg2++. 11. 1.Ba7+ Ka8, 2.Qc8++ or 1.Ra8+ Kxa8 (the Rook is sacrificed), 2.Qc8++. 12. 1.Rxa7+ Kxa7, 2.Qa5++. -

Discovered Attacks #Chessathome
Lesson 17: Discovered Attacks Discovered Check If the White knight on e5 magically vanished, Black would be in check from the White queen on e2. Let’s try to find a good move for that knight, knowing that on their next move Black will have to escape the queen check. Suppose White moves the knight to g6. Here it’s attacked by two pawns. However, Black cannot capture the knight. They must block the queen check first. White is then able to use the knight to capture the Black rook on h8. Even better, suppose White moves the knight to c6. Again, Black must block the queen check. The White knight can then capture the Black queen. When a piece moves to uncover a check from a second piece, it’s called a DISCOVERED CHECK. Puzzle Corner How can White use a discovered check to win material? #ChessatHome www.chessinschools.co.uk Discovered Attack This time White wishes his bishop on d3 would disappear. They would then be able to use their queen to capture the undefended Black queen on d4. White moves the White bishop to b5 (check), uncovering the attack on the Black queen. Black would love to move or defend their queen but before doing so must escape the bishop check. This gives White the move they need to capture the Black queen. When a player moves a piece to uncover an attack from a second piece, it’s called a DISCOVERED ATTACK. Double Attacks Grandmaster Test You now know all the dou- This puzzle has ble attacks in chess. -

October, 1950 Scene from Dubrovnik 50 Cents
SCENE FROM DUBROVNIK SITE OF THE INTERNATIONAL CHESS TEAM TOURNAMENT (See Paye 290) OCTOBER, 1950 • ONE YEAR SUBSCRIPTION-$4.75 • 50 CENTS Emanuel Lasker won the World's Championship at the age of 26? Moving one square at a time, a Bishop may go from K 1 to K7 In eight moves in 483 ways ? In successive rounds, Reuben Fine once beat Botvinnik, Reshevsky, drew with Capablanca, beat Euwe, Flohr and Alekhine7 It t akes a Kn ight three moyes to checl!: a King that is two squares away on the same diagonal? WHITE is to play and draw in tllis ex· 12 B-R2 P- QR4 14 N_N1 P-B4 PaUl Morphy, King of Chess, alice lost qUisite ending by Korteling. 13 0 - 0 P-N5 15 B_B4 P-K5 a game in 12 moves? 16 N_N5 B-R3 Two lone Knights Cnnllot force mate ? mack cbaHenges White's best·posted Chess players fOl' mOl'e thun 500 years piece. used a pair of dice t o detet'mine their 17 BxB R,B 19 R,R N,R moves? 18 PxP RPxP 20 P-QB3 P-R3 21 N-R3 N-N5 Whimsy Now he attacks the Rook Pawn and Let us turn to a bit of Fail')' Chess , In fOl'ces 22 P-KK3, this problem by your columnist, the Call' 22 P_KN3 ventions are suspended, Black is to play And no\\", with all his Pawns on black first and he lp White to mate in three ::;ql1ll1'CS, White lias condemned his msll· moves. op to life imprisonmflnt, 22 ... -

Bearspaw Junior Chess Club Curriculum
Bearspaw Junior Chess Club Curriculum Levels Basic Concepts Checkmates Strategy Tactics • The Pieces • Check • Shrinking the opposing • Escaping from check • How They Move • Checkmate King’s space Run Away, • Setting up the • Stalemate • Creating Escape Squares Block, board Capture Special Moves • Fool’s mate Basic Opening Strategy • Hanging Piece (Piece En Novice • Castling • Scholar’s • Attack the Center with Prise) • Promotion mate Center Pawns Level 2 • En Passant • Solo/Helper • Knights & Bishops out early mates • Castle for King safety • Computer and • Rooks connected Online Chess • Value of pieces • Two Rooks • Attack f7/f2 • Relative Exchanges Novice • Etiquette or Queen • Piece Preferences • Winning the Exchange • Touch move and Rook (outposts, open files, (capturing more or Level 3 • Release move • Back rank batteries, fianchetto, better pieces) • Tournaments mates a Knight on the rim, • Simplify when up • Using clocks hide or centralize the King) material Copyright @ 2018 Bearspaw Junior Chess Club – All Rights Reserved. Bearspaw Junior Chess Club Curriculum Levels Concepts Checkmates Strategy Tactics Intermediate • Notation • King and • Critical Moves • Forks • Phases of the game Queen • Find 3 moves and • Pins Level 4 • Simple Pawn Structure • King and rate them: (Chains, Isolated, Doubled, Passed) Rook - Good, Openings - Better - Best Compare 2 openings: • Giuoco Piano • Fried Liver Attack Intermediate e4-e5 • Queen and Threat Assessment • Skewer • Bishop Bishop 1. His/her Checks… • Discovered Level 5 • Scotch • Queen and and Your Checks Attack • Danish Knight 2. His/her Captures… • Petrov and your Captures 3. His/her Threats… and your Threats Intermediate More e4-e5 • Rook and The Five Elements • Double Check • Ruy Lopez Bishop 1. -

State Titles Change Hands Schroeder Wins Martin Becomes Ohio Title Calif
Vol. V Thmsday. Number 3 Offjelal Publication of me United States (oessfederat)on October 5, 1950 STATE TITLES CHANGE HANDS SCHROEDER WINS MARTIN BECOMES OHIO TITLE CALIF. CHAMPION Ray Martin, Los Angeles County .Af.tt.ine ~ Ga,.f'l Victory in the 34-man Ohio State Champion, added the california Championship went to James State title to his list with 6-1 score Schroeder of Columbus in a V'ery in the finals held at San Fran Ct.ejj Caree,. tight combat in a strong field of cisco. V. Pafnutieff of San Fran Additional Data contenders which included three cisco and G.eorge Croy of Los An By A. B UI~"k.~ former State champions and a geles finished in a tie for 2nd with host of city champions. To the 4-3 each, while P. D. Smith of final game it was a battle, for in Bakersfield was fourth with 31k· IV. THE " MOSCOW CHAMP the last round meeting between 31h. Charles Bagby and Sven Aim· IONSHIP TOURNAMENT 1916" Schroeder and Ellison, if Ellison grem tied for 5th with 3-4, and (Continued) had won he would be c:hampion, were followed by William Steckel iI he drew the title would go to at 2 'h-'B~ and Leslie Boyette with ANOTHER ALEKHINE A. Nasvytis. Ellison lost and 2-5. dropped to sixth pl ace. while the LEGEND SHATIERED 22ryear old Schroeder gained the uite a number of readers of the title. ACP ANNOUNCES preceding issue of CHESS LIFE Second place went to A. Nasvy· TOURNEY WINNERS \V9iI undoubtedly, in going over tis of Cleveland, while two ex· The Chess Problem Association the game played between Grigoriev Pawn Club players from Cleveland of America announces the results and Alekhine in Moscow 1915 and clinched third ilnd fourlh- GeorJte in the informal problem compos particularly Alekbine's own notes Miller :md William Grangcr. -

CHESS the 2012 Spring Powwow Official Merit Badge Worksheet
CHESS The 2012 Spring PowWow Official Merit Badge Worksheet Scout's Name Instructor's Name Scout's Address City State Zip Instructions 1) The Scout is to review the merit badge book before the first week of the PowWow. 2) Bring this worksheet, paper, and pen or pencil each week. 3) Bring a Merit Badge blue card with you on the second week. Requirement Instructions* 1) Requirements 1, 2, 3, 4, and 5 should be covered and should be passed off during the two sessions of the PowWow. 2) Requirement 6 must be completed as homework in the time between the two sessions of the PowWow. *Due to possible time constraints at the PowWow, certain requirements that were originally planned to be completed in class may need to be completed as homework. Please LISTEN to ALL INSTRUCTIONS in class to be aware of any changes. Requirement 1 Initial What is the history of the game of chess? Why is it considered a game of planning and strategy? Requirement 2 Initial Discuss with your merit badge counselor the following: a. The benefits of playing chess, including developing critical thinking skills, concentration skills, and decision-making skills, and how these skills can help you in other areas of your life b. Sportsmanship and chess etiquette Requirement 3 Initial Demonstrate to your counselor that you know each of the following. Then, using Scouting's Teaching EDGE, teach the following to a Scout who does not know how to play chess: a. The name of each chess piece b. How to set up a chessboard c. -
Learn Chess the Right Way
Learn Chess the Right Way Book 5 Finding Winning Moves! by Susan Polgar with Paul Truong 2017 Russell Enterprises, Inc. Milford, CT USA 1 Learn Chess the Right Way Learn Chess the Right Way Book 5: Finding Winning Moves! © Copyright 2017 Susan Polgar ISBN: 978-1-941270-45-5 ISBN (eBook): 978-1-941270-46-2 All Rights Reserved No part of this book maybe used, reproduced, stored in a retrieval system or transmitted in any manner or form whatsoever or by any means, electronic, electrostatic, magnetic tape, photocopying, recording or otherwise, without the express written permission from the publisher except in the case of brief quotations embodied in critical articles or reviews. Published by: Russell Enterprises, Inc. PO Box 3131 Milford, CT 06460 USA http://www.russell-enterprises.com [email protected] Cover design by Janel Lowrance Front cover Image by Christine Flores Back cover photo by Timea Jaksa Contributor: Tom Polgar-Shutzman Printed in the United States of America 2 Table of Contents Introduction 4 Chapter 1 Quiet Moves to Checkmate 5 Chapter 2 Quite Moves to Win Material 43 Chapter 3 Zugzwang 56 Chapter 4 The Grand Test 80 Solutions 141 3 Learn Chess the Right Way Introduction Ever since I was four years old, I remember the joy of solving chess puzzles. I wrote my first puzzle book when I was just 15, and have published a number of other best-sellers since, such as A World Champion’s Guide to Chess, Chess Tactics for Champions, and Breaking Through, etc. With over 40 years of experience as a world-class player and trainer, I have developed the most effective way to help young players and beginners – Learn Chess the Right Way.