Unit 2: Angular Kinematics Angular Kinematics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Circle Theorems
Circle theorems A LEVEL LINKS Scheme of work: 2b. Circles – equation of a circle, geometric problems on a grid Key points • A chord is a straight line joining two points on the circumference of a circle. So AB is a chord. • A tangent is a straight line that touches the circumference of a circle at only one point. The angle between a tangent and the radius is 90°. • Two tangents on a circle that meet at a point outside the circle are equal in length. So AC = BC. • The angle in a semicircle is a right angle. So angle ABC = 90°. • When two angles are subtended by the same arc, the angle at the centre of a circle is twice the angle at the circumference. So angle AOB = 2 × angle ACB. • Angles subtended by the same arc at the circumference are equal. This means that angles in the same segment are equal. So angle ACB = angle ADB and angle CAD = angle CBD. • A cyclic quadrilateral is a quadrilateral with all four vertices on the circumference of a circle. Opposite angles in a cyclic quadrilateral total 180°. So x + y = 180° and p + q = 180°. • The angle between a tangent and chord is equal to the angle in the alternate segment, this is known as the alternate segment theorem. So angle BAT = angle ACB. Examples Example 1 Work out the size of each angle marked with a letter. Give reasons for your answers. Angle a = 360° − 92° 1 The angles in a full turn total 360°. = 268° as the angles in a full turn total 360°. -
Appendix: Derivations
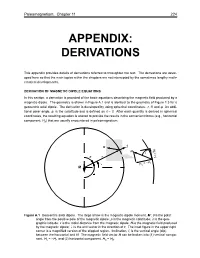
Paleomagnetism: Chapter 11 224 APPENDIX: DERIVATIONS This appendix provides details of derivations referred to throughout the text. The derivations are devel- oped here so that the main topics within the chapters are not interrupted by the sometimes lengthy math- ematical developments. DERIVATION OF MAGNETIC DIPOLE EQUATIONS In this section, a derivation is provided of the basic equations describing the magnetic field produced by a magnetic dipole. The geometry is shown in Figure A.1 and is identical to the geometry of Figure 1.3 for a geocentric axial dipole. The derivation is developed by using spherical coordinates: r, θ, and φ. An addi- tional polar angle, p, is the colatitude and is defined as π – θ. After each quantity is derived in spherical coordinates, the resulting equation is altered to provide the results in the convenient forms (e.g., horizontal component, Hh) that are usually encountered in paleomagnetism. H ^r H H h I = H p r = –Hr H v M Figure A.1 Geocentric axial dipole. The large arrow is the magnetic dipole moment, M ; θ is the polar angle from the positive pole of the magnetic dipole; p is the magnetic colatitude; λ is the geo- graphic latitude; r is the radial distance from the magnetic dipole; H is the magnetic field produced by the magnetic dipole; rˆ is the unit vector in the direction of r. The inset figure in the upper right corner is a magnified version of the stippled region. Inclination, I, is the vertical angle (dip) between the horizontal and H. The magnetic field vector H can be broken into (1) vertical compo- nent, Hv =–Hr, and (2) horizontal component, Hh = Hθ . -

Position, Displacement, Velocity Big Picture
Position, Displacement, Velocity Big Picture I Want to know how/why things move I Need a way to describe motion mathematically: \Kinematics" I Tools of kinematics: calculus (rates) and vectors (directions) I Chapters 2, 4 are all about kinematics I First 1D, then 2D/3D I Main ideas: position, velocity, acceleration Language is crucial Physics uses ordinary words but assigns specific technical meanings! WORD ORDINARY USE PHYSICS USE position where something is where something is velocity speed speed and direction speed speed magnitude of velocity vec- tor displacement being moved difference in position \as the crow flies” from one instant to another Language, continued WORD ORDINARY USE PHYSICS USE total distance displacement or path length traveled path length trav- eled average velocity | displacement divided by time interval average speed total distance di- total distance divided by vided by time inter- time interval val How about some examples? Finer points I \instantaneous" velocity v(t) changes from instant to instant I graphically, it's a point on a v(t) curve or the slope of an x(t) curve I average velocity ~vavg is not a function of time I it's defined for an interval between instants (t1 ! t2, ti ! tf , t0 ! t, etc.) I graphically, it's the \rise over run" between two points on an x(t) curve I in 1D, vx can be called v I it's a component that is positive or negative I vectors don't have signs but their components do What you need to be able to do I Given starting/ending position, time, speed for one or more trip legs, calculate average -

Angles ANGLE Topics • Coterminal Angles • Defintion of an Angle
Angles ANGLE Topics • Coterminal Angles • Defintion of an angle • Decimal degrees to degrees, minutes, seconds by hand using the TI-82 or TI-83 Plus • Degrees, seconds, minutes changed to decimal degree by hand using the TI-82 or TI-83 Plus • Standard position of an angle • Positive and Negative angles ___________________________________________________________________________ Definition: Angle An angle is created when a half-ray (the initial side of the angle) is drawn out of a single point (the vertex of the angle) and the ray is rotated around the point to another location (becoming the terminal side of the angle). An angle is created when a half-ray (initial side of angle) A: vertex point of angle is drawn out of a single point (vertex) AB: Initial side of angle. and the ray is rotated around the point to AC: Terminal side of angle another location (becoming the terminal side of the angle). Hence angle A is created (also called angle BAC) STANDARD POSITION An angle is in "standard position" when the vertex is at the origin and the initial side of the angle is along the positive x-axis. Recall: polynomials in algebra have a standard form (all the terms have to be listed with the term having the highest exponent first). In trigonometry, there is a standard position for angles. In this way, we are all talking about the same thing and are not trying to guess if your math solution and my math solution are the same. Not standard position. Not standard position. This IS standard position. Initial side not along Initial side along negative Initial side IS along the positive x-axis. -

Rotational Motion of Electric Machines
Rotational Motion of Electric Machines • An electric machine rotates about a fixed axis, called the shaft, so its rotation is restricted to one angular dimension. • Relative to a given end of the machine’s shaft, the direction of counterclockwise (CCW) rotation is often assumed to be positive. • Therefore, for rotation about a fixed shaft, all the concepts are scalars. 17 Angular Position, Velocity and Acceleration • Angular position – The angle at which an object is oriented, measured from some arbitrary reference point – Unit: rad or deg – Analogy of the linear concept • Angular acceleration =d/dt of distance along a line. – The rate of change in angular • Angular velocity =d/dt velocity with respect to time – The rate of change in angular – Unit: rad/s2 position with respect to time • and >0 if the rotation is CCW – Unit: rad/s or r/min (revolutions • >0 if the absolute angular per minute or rpm for short) velocity is increasing in the CCW – Analogy of the concept of direction or decreasing in the velocity on a straight line. CW direction 18 Moment of Inertia (or Inertia) • Inertia depends on the mass and shape of the object (unit: kgm2) • A complex shape can be broken up into 2 or more of simple shapes Definition Two useful formulas mL2 m J J() RRRR22 12 3 1212 m 22 JRR()12 2 19 Torque and Change in Speed • Torque is equal to the product of the force and the perpendicular distance between the axis of rotation and the point of application of the force. T=Fr (Nm) T=0 T T=Fr • Newton’s Law of Rotation: Describes the relationship between the total torque applied to an object and its resulting angular acceleration. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Oscillations
CHAPTER FOURTEEN OSCILLATIONS 14.1 INTRODUCTION In our daily life we come across various kinds of motions. You have already learnt about some of them, e.g., rectilinear 14.1 Introduction motion and motion of a projectile. Both these motions are 14.2 Periodic and oscillatory non-repetitive. We have also learnt about uniform circular motions motion and orbital motion of planets in the solar system. In 14.3 Simple harmonic motion these cases, the motion is repeated after a certain interval of 14.4 Simple harmonic motion time, that is, it is periodic. In your childhood, you must have and uniform circular enjoyed rocking in a cradle or swinging on a swing. Both motion these motions are repetitive in nature but different from the 14.5 Velocity and acceleration periodic motion of a planet. Here, the object moves to and fro in simple harmonic motion about a mean position. The pendulum of a wall clock executes 14.6 Force law for simple a similar motion. Examples of such periodic to and fro harmonic motion motion abound: a boat tossing up and down in a river, the 14.7 Energy in simple harmonic piston in a steam engine going back and forth, etc. Such a motion motion is termed as oscillatory motion. In this chapter we 14.8 Some systems executing study this motion. simple harmonic motion The study of oscillatory motion is basic to physics; its 14.9 Damped simple harmonic motion concepts are required for the understanding of many physical 14.10 Forced oscillations and phenomena. In musical instruments, like the sitar, the guitar resonance or the violin, we come across vibrating strings that produce pleasing sounds. -

Celestial Coordinate Systems
Celestial Coordinate Systems Craig Lage Department of Physics, New York University, [email protected] January 6, 2014 1 Introduction This document reviews briefly some of the key ideas that you will need to understand in order to identify and locate objects in the sky. It is intended to serve as a reference document. 2 Angular Basics When we view objects in the sky, distance is difficult to determine, and generally we can only indicate their direction. For this reason, angles are critical in astronomy, and we use angular measures to locate objects and define the distance between objects. Angles are measured in a number of different ways in astronomy, and you need to become familiar with the different notations and comfortable converting between them. A basic angle is shown in Figure 1. θ Figure 1: A basic angle, θ. We review some angle basics. We normally use two primary measures of angles, degrees and radians. In astronomy, we also sometimes use time as a measure of angles, as we will discuss later. A radian is a dimensionless measure equal to the length of the circular arc enclosed by the angle divided by the radius of the circle. A full circle is thus equal to 2π radians. A degree is an arbitrary measure, where a full circle is defined to be equal to 360◦. When using degrees, we also have two different conventions, to divide one degree into decimal degrees, or alternatively to divide it into 60 minutes, each of which is divided into 60 seconds. These are also referred to as minutes of arc or seconds of arc so as not to confuse them with minutes of time and seconds of time. -

Fluid Mechanics 2 Course Code MPEG222 Second Semester Fall 2019/2020 by Dr
South valley University Faculty of Engineering Mechanical Power Engineering Dep. Fluid Mechanics 2 Course Code MPEG222 Second Semester Fall 2019/2020 By Dr. Eng./Ahmed Abdelhady Mobile: 01118501269 Email: [email protected] Review of Rotational Motion and Angular Momentum The motion of a rigid body can be considered to be the combination of the: ➢ Translational motion of its center of mass and, The translational motion can be analyzed using the linear momentum equation. ➢ Rotational motion about its center of mass. all points in the body move in circles about the axis of rotation. The amount of rotation of a point in a body is expressed in terms of the angle θ swept by a line of length r that connects the point to the axis of rotation and is perpendicular to the axis. The physical distance traveled by a point along its circular path is l = θr, where r is the normal distance of the point from the axis of rotation and θ is the angular distance in rad. Note that 1 rad corresponds to 360/(2π) = 57.3°. V is the linear velocity and at is the linear acceleration in the tangential direction for a point located at a distance r from the axis of rotation. Newton’s second law requires that there must be a force acting in the tangential direction to cause angular acceleration. The strength of the rotating effect, called the moment or torque, is proportional to the magnitude of the force and its distance from the axis of rotation. ➢ I is the moment of inertia of the body about the axis of rotation Note that: ➢ The linear momentum of a body of mass m having a velocity V is mV, and the direction of linear momentum is identical to the direction of velocity. -
Distance, Displacement, and Position
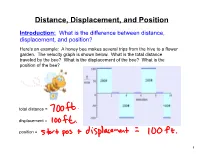
Distance, Displacement, and Position Introduction: What is the difference between distance, displacement, and position? Here's an example: A honey bee makes several trips from the hive to a flower garden. The velocity graph is shown below. What is the total distance traveled by the bee? What is the displacement of the bee? What is the position of the bee? total distance = displacement = position = 1 Warm-up A particle moves along the x-axis so that the acceleration at any time t is given by: At time , the velocity of the particle is and at time , the position is . (a) Write an expression for the velocity of the particle at any time . (b) For what values of is the particle at rest? (c) Write an expression for the position of the particle at any time . (d) Find the total distance traveled by the particle from to . 2 Warm-up Answers (a) (b) (c) (d) Total Distance = 3 Now, using the equation from the warm-up find the following (WITHOUT A CALCULATOR): (a) the total distance from 0 to 4 (b) the displacement from 0 to 4 4 To find the displacement (position shift) from the velocity function, we just integrate the function. The negative areas below the x-axis subtract from the total displacement. Displacement = To find the distance traveled we have to use absolute value. Distance traveled = To find the distance traveled by hand you must: Find the roots of the velocity equation and integrate in pieces, just like when we found the area between a curve and x-axis. -

Classify Each Triangle by Its Side Lengths and Angle Measurements
GRADE 4 | MODULE 4 | TOPIC D | LESSONS 12–16 KEY CONCEPT OVERVIEW In Lessons 12 through 16, students explore lines of symmetry and characteristics of triangles and quadrilaterals. You can expect to see homework that asks your child to do the following: ▪ Find and draw lines of symmetry. ▪ Given half of a figure and the line of symmetry, draw the other half of the figure. ▪ Classify triangles by side lengths (e.g., equilateral, isosceles, scalene) and by angle measurements (e.g., acute, right, obtuse). ▪ Draw triangles that fit different classifications (e.g., acute and scalene). ▪ Name quadrilaterals, identify attributes (i.e., characteristics) that define them, and construct them based on given attributes. SAMPLE PROBLEM (From Lesson 13) Classify each triangle by its side lengths and angle measurements. Circle the correct names. Additional sample problems with detailed answer steps are found in the Eureka Math Homework Helpers books. Learn more at GreatMinds.org. For more resources, visit » Eureka.support GRADE 4 | MODULE 4 | TOPIC D | LESSONS 12–16 HOW YOU CAN HELP AT HOME ▪ Ask your child to look around the house for objects that have lines of symmetry. Examples include the headboard of a bed, dressers, chairs, couches, and place mats. Ask him to show where the line of symmetry would be and what makes it a line of symmetry. Be careful of objects such as doors and windows. They could have a line of symmetry, but if there’s a knob or crank on just one side, then they are not symmetrical. ▪ Ask your child to name and draw all the quadrilaterals she can think of (e.g., square, rectangle, parallelogram, trapezoid, and rhombus). -

Astronomy I – Vocabulary You Need to Know
Astronomy I – Vocabulary you need to know: Altitude – Angular distance above or below the horizon, measured along a vertical circle, to the celestial object. Angular measure – Measurement in terms of angles or degrees of arc. An entire circle is divided into 360 º, each degree in 60 ´ (minutes), and each minute into 60 ´´ (seconds). This scale is used to denote, among other things, the apparent size of celestial bodies, their separation on the celestial sphere, etc. One example is the diameter of the Moon’s disc, which measures approximately 0.5 º= 30 ´. Azimuth – The angle along the celestial horizon, measured eastward from the north point, to the intersection of the horizon with the vertical circle passing through an object. Big Bang Theory – States that the universe began as a tiny but powerful explosion of space-time roughly 13.7 billion years ago. Cardinal points – The four principal points of the compass: North, South, East, West. Celestial equator – Is the great circle on the celestial sphere defined by the projection of the plane of the Earth’s equator. It divides the celestial sphere into the northern and southern hemisphere. The celestial equator has a declination of 0 º. Celestial poles – Points above which the celestial sphere appears to rotate. Celestial sphere – An imaginary sphere of infinite radius, in the centre of which the observer is located, and against which all celestial bodies appear to be projected. Constellation – A Precisely defined part of the celestial sphere. In the older, narrower meaning of the term, it is a group of fixed stars forming a characteristic pattern.