24. Moments of Inertia: Examples Michael Fowler
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 11. Three Dimensional Analytic Geometry and Vectors
Chapter 11. Three dimensional analytic geometry and vectors. Section 11.5 Quadric surfaces. Curves in R2 : x2 y2 ellipse + =1 a2 b2 x2 y2 hyperbola − =1 a2 b2 parabola y = ax2 or x = by2 A quadric surface is the graph of a second degree equation in three variables. The most general such equation is Ax2 + By2 + Cz2 + Dxy + Exz + F yz + Gx + Hy + Iz + J =0, where A, B, C, ..., J are constants. By translation and rotation the equation can be brought into one of two standard forms Ax2 + By2 + Cz2 + J =0 or Ax2 + By2 + Iz =0 In order to sketch the graph of a quadric surface, it is useful to determine the curves of intersection of the surface with planes parallel to the coordinate planes. These curves are called traces of the surface. Ellipsoids The quadric surface with equation x2 y2 z2 + + =1 a2 b2 c2 is called an ellipsoid because all of its traces are ellipses. 2 1 x y 3 2 1 z ±1 ±2 ±3 ±1 ±2 The six intercepts of the ellipsoid are (±a, 0, 0), (0, ±b, 0), and (0, 0, ±c) and the ellipsoid lies in the box |x| ≤ a, |y| ≤ b, |z| ≤ c Since the ellipsoid involves only even powers of x, y, and z, the ellipsoid is symmetric with respect to each coordinate plane. Example 1. Find the traces of the surface 4x2 +9y2 + 36z2 = 36 1 in the planes x = k, y = k, and z = k. Identify the surface and sketch it. Hyperboloids Hyperboloid of one sheet. The quadric surface with equations x2 y2 z2 1. -
Appendix: Derivations
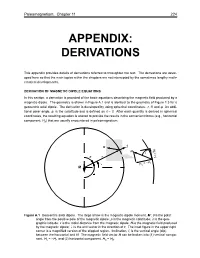
Paleomagnetism: Chapter 11 224 APPENDIX: DERIVATIONS This appendix provides details of derivations referred to throughout the text. The derivations are devel- oped here so that the main topics within the chapters are not interrupted by the sometimes lengthy math- ematical developments. DERIVATION OF MAGNETIC DIPOLE EQUATIONS In this section, a derivation is provided of the basic equations describing the magnetic field produced by a magnetic dipole. The geometry is shown in Figure A.1 and is identical to the geometry of Figure 1.3 for a geocentric axial dipole. The derivation is developed by using spherical coordinates: r, θ, and φ. An addi- tional polar angle, p, is the colatitude and is defined as π – θ. After each quantity is derived in spherical coordinates, the resulting equation is altered to provide the results in the convenient forms (e.g., horizontal component, Hh) that are usually encountered in paleomagnetism. H ^r H H h I = H p r = –Hr H v M Figure A.1 Geocentric axial dipole. The large arrow is the magnetic dipole moment, M ; θ is the polar angle from the positive pole of the magnetic dipole; p is the magnetic colatitude; λ is the geo- graphic latitude; r is the radial distance from the magnetic dipole; H is the magnetic field produced by the magnetic dipole; rˆ is the unit vector in the direction of r. The inset figure in the upper right corner is a magnified version of the stippled region. Inclination, I, is the vertical angle (dip) between the horizontal and H. The magnetic field vector H can be broken into (1) vertical compo- nent, Hv =–Hr, and (2) horizontal component, Hh = Hθ . -

Rotational Motion of Electric Machines
Rotational Motion of Electric Machines • An electric machine rotates about a fixed axis, called the shaft, so its rotation is restricted to one angular dimension. • Relative to a given end of the machine’s shaft, the direction of counterclockwise (CCW) rotation is often assumed to be positive. • Therefore, for rotation about a fixed shaft, all the concepts are scalars. 17 Angular Position, Velocity and Acceleration • Angular position – The angle at which an object is oriented, measured from some arbitrary reference point – Unit: rad or deg – Analogy of the linear concept • Angular acceleration =d/dt of distance along a line. – The rate of change in angular • Angular velocity =d/dt velocity with respect to time – The rate of change in angular – Unit: rad/s2 position with respect to time • and >0 if the rotation is CCW – Unit: rad/s or r/min (revolutions • >0 if the absolute angular per minute or rpm for short) velocity is increasing in the CCW – Analogy of the concept of direction or decreasing in the velocity on a straight line. CW direction 18 Moment of Inertia (or Inertia) • Inertia depends on the mass and shape of the object (unit: kgm2) • A complex shape can be broken up into 2 or more of simple shapes Definition Two useful formulas mL2 m J J() RRRR22 12 3 1212 m 22 JRR()12 2 19 Torque and Change in Speed • Torque is equal to the product of the force and the perpendicular distance between the axis of rotation and the point of application of the force. T=Fr (Nm) T=0 T T=Fr • Newton’s Law of Rotation: Describes the relationship between the total torque applied to an object and its resulting angular acceleration. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Section 6.2 Introduction to Conics: Parabolas 103
Section 6.2 Introduction to Conics: Parabolas 103 Course Number Section 6.2 Introduction to Conics: Parabolas Instructor Objective: In this lesson you learned how to write the standard form of the equation of a parabola. Date Important Vocabulary Define each term or concept. Directrix A fixed line in the plane from which each point on a parabola is the same distance as the distance from the point to a fixed point in the plane. Focus A fixed point in the plane from which each point on a parabola is the same distance as the distance from the point to a fixed line in the plane. Focal chord A line segment that passes through the focus of a parabola and has endpoints on the parabola. Latus rectum The specific focal chord perpendicular to the axis of a parabola. Tangent A line is tangent to a parabola at a point on the parabola if the line intersects, but does not cross, the parabola at the point. I. Conics (Page 433) What you should learn How to recognize a conic A conic section, or conic, is . the intersection of a plane as the intersection of a and a double-napped cone. plane and a double- napped cone Name the four basic conic sections: circle, ellipse, parabola, and hyperbola. In the formation of the four basic conics, the intersecting plane does not pass through the vertex of the cone. When the plane does pass through the vertex, the resulting figure is a(n) degenerate conic , such as . a point, a line, or a pair of intersecting lines. -

Lesson 7: General Pyramids and Cones and Their Cross-Sections
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 7 M3 GEOMETRY Lesson 7: General Pyramids and Cones and Their Cross-Sections Student Outcomes . Students understand the definition of a general pyramid and cone and that their respective cross-sections are similar to the base. Students show that if two cones have the same base area and the same height, then cross-sections for the cones the same distance from the vertex have the same area. Lesson Notes In Lesson 7, students examine the relationship between a cross-section and the base of a general cone. Students understand that pyramids and circular cones are subsets of general cones just as prisms and cylinders are subsets of general cylinders. In order to understand why a cross-section is similar to the base, there is discussion regarding a dilation in three dimensions, explaining why a dilation maps a plane to a parallel plane. Then, a more precise argument is made using triangular pyramids; this parallels what is seen in Lesson 6, where students are presented with the intuitive idea of why bases of general cylinders are congruent to cross-sections using the notion of a translation in three dimensions, followed by a more precise argument using a triangular prism and SSS triangle congruence. Finally, students prove the general cone cross-section theorem, which is used later to understand Cavalieri’s principle. Classwork Opening Exercise (3 minutes) The goals of the Opening Exercise remind students of the parent category of general cylinders, how prisms are a subcategory under general cylinders, and how to draw a parallel to figures that “come to a point” (or, they might initially describe these figures); some of the figures that come to a point have polygonal bases, while some have curved bases. -

Apollonius of Pergaconics. Books One - Seven
APOLLONIUS OF PERGACONICS. BOOKS ONE - SEVEN INTRODUCTION A. Apollonius at Perga Apollonius was born at Perga (Περγα) on the Southern coast of Asia Mi- nor, near the modern Turkish city of Bursa. Little is known about his life before he arrived in Alexandria, where he studied. Certain information about Apollonius’ life in Asia Minor can be obtained from his preface to Book 2 of Conics. The name “Apollonius”(Apollonius) means “devoted to Apollo”, similarly to “Artemius” or “Demetrius” meaning “devoted to Artemis or Demeter”. In the mentioned preface Apollonius writes to Eudemus of Pergamum that he sends him one of the books of Conics via his son also named Apollonius. The coincidence shows that this name was traditional in the family, and in all prob- ability Apollonius’ ancestors were priests of Apollo. Asia Minor during many centuries was for Indo-European tribes a bridge to Europe from their pre-fatherland south of the Caspian Sea. The Indo-European nation living in Asia Minor in 2nd and the beginning of the 1st millennia B.C. was usually called Hittites. Hittites are mentioned in the Bible and in Egyptian papyri. A military leader serving under the Biblical king David was the Hittite Uriah. His wife Bath- sheba, after his death, became the wife of king David and the mother of king Solomon. Hittites had a cuneiform writing analogous to the Babylonian one and hi- eroglyphs analogous to Egyptian ones. The Czech historian Bedrich Hrozny (1879-1952) who has deciphered Hittite cuneiform writing had established that the Hittite language belonged to the Western group of Indo-European languages [Hro]. -

Celestial Coordinate Systems
Celestial Coordinate Systems Craig Lage Department of Physics, New York University, [email protected] January 6, 2014 1 Introduction This document reviews briefly some of the key ideas that you will need to understand in order to identify and locate objects in the sky. It is intended to serve as a reference document. 2 Angular Basics When we view objects in the sky, distance is difficult to determine, and generally we can only indicate their direction. For this reason, angles are critical in astronomy, and we use angular measures to locate objects and define the distance between objects. Angles are measured in a number of different ways in astronomy, and you need to become familiar with the different notations and comfortable converting between them. A basic angle is shown in Figure 1. θ Figure 1: A basic angle, θ. We review some angle basics. We normally use two primary measures of angles, degrees and radians. In astronomy, we also sometimes use time as a measure of angles, as we will discuss later. A radian is a dimensionless measure equal to the length of the circular arc enclosed by the angle divided by the radius of the circle. A full circle is thus equal to 2π radians. A degree is an arbitrary measure, where a full circle is defined to be equal to 360◦. When using degrees, we also have two different conventions, to divide one degree into decimal degrees, or alternatively to divide it into 60 minutes, each of which is divided into 60 seconds. These are also referred to as minutes of arc or seconds of arc so as not to confuse them with minutes of time and seconds of time. -

Fluid Mechanics 2 Course Code MPEG222 Second Semester Fall 2019/2020 by Dr
South valley University Faculty of Engineering Mechanical Power Engineering Dep. Fluid Mechanics 2 Course Code MPEG222 Second Semester Fall 2019/2020 By Dr. Eng./Ahmed Abdelhady Mobile: 01118501269 Email: [email protected] Review of Rotational Motion and Angular Momentum The motion of a rigid body can be considered to be the combination of the: ➢ Translational motion of its center of mass and, The translational motion can be analyzed using the linear momentum equation. ➢ Rotational motion about its center of mass. all points in the body move in circles about the axis of rotation. The amount of rotation of a point in a body is expressed in terms of the angle θ swept by a line of length r that connects the point to the axis of rotation and is perpendicular to the axis. The physical distance traveled by a point along its circular path is l = θr, where r is the normal distance of the point from the axis of rotation and θ is the angular distance in rad. Note that 1 rad corresponds to 360/(2π) = 57.3°. V is the linear velocity and at is the linear acceleration in the tangential direction for a point located at a distance r from the axis of rotation. Newton’s second law requires that there must be a force acting in the tangential direction to cause angular acceleration. The strength of the rotating effect, called the moment or torque, is proportional to the magnitude of the force and its distance from the axis of rotation. ➢ I is the moment of inertia of the body about the axis of rotation Note that: ➢ The linear momentum of a body of mass m having a velocity V is mV, and the direction of linear momentum is identical to the direction of velocity. -

Characteristics of Solids
Mathematics Instructional Plan – Grade 4 Characteristics of Solids Strand: Measurement and Geometry Topic: Geometric characteristics of solid figures Primary SOL: 4.11 The student will identify, describe, compare, and contrast plane and solid figures according to their characteristics (number of angles, vertices, edges, and the number and shape of faces) using concrete and pictorial representations. Related SOL: 4.10a, b Materials Set of geometric solid models for students (cube, rectangular prism, square pyramid, sphere, cone, and cylinder) Demonstration set of geometric solids models Nets for Geometric Solids (attached) Real-world objects in the shape of a cube, rectangular prism, square pyramid, sphere, cone, and cylinder. Why Am I Special? activity sheet (attached) Spaghetti Sticky notes or squares of paper What Am I? Matching Cards Shapes (attached) What Am I? Matching Cards Descriptions (attached) Real World Look-a-Like 3-D Shapes handout (attached) Vocabulary angle, attributes, cone, congruent, cube, cylinder, edge, face, parallel, plane figure, rectangular prism, solid figure, sphere, square pyramid, three dimensional, two dimensional, vertex/vertices Student/Teacher Actions: What should students be doing? What should teachers be doing? Note: To support students as they develop an awareness and an understanding of the vocabulary associated with two- and three-dimensional geometric shapes/figures, consider creating a word wall using the geometry related vocabulary cards developed by the Virginia Department of Education. 1. Students will be working in groups of 2–3. To introduce the lesson, provide each student with a set of geometric solids: cube, rectangular prism, square pyramid, sphere, cone, and cylinder. This is a chance to observe and explore the figures, so allow students to work without providing any explanation of the figures, these ideas will be made clear in the remainder of the lesson. -

Astronomy I – Vocabulary You Need to Know
Astronomy I – Vocabulary you need to know: Altitude – Angular distance above or below the horizon, measured along a vertical circle, to the celestial object. Angular measure – Measurement in terms of angles or degrees of arc. An entire circle is divided into 360 º, each degree in 60 ´ (minutes), and each minute into 60 ´´ (seconds). This scale is used to denote, among other things, the apparent size of celestial bodies, their separation on the celestial sphere, etc. One example is the diameter of the Moon’s disc, which measures approximately 0.5 º= 30 ´. Azimuth – The angle along the celestial horizon, measured eastward from the north point, to the intersection of the horizon with the vertical circle passing through an object. Big Bang Theory – States that the universe began as a tiny but powerful explosion of space-time roughly 13.7 billion years ago. Cardinal points – The four principal points of the compass: North, South, East, West. Celestial equator – Is the great circle on the celestial sphere defined by the projection of the plane of the Earth’s equator. It divides the celestial sphere into the northern and southern hemisphere. The celestial equator has a declination of 0 º. Celestial poles – Points above which the celestial sphere appears to rotate. Celestial sphere – An imaginary sphere of infinite radius, in the centre of which the observer is located, and against which all celestial bodies appear to be projected. Constellation – A Precisely defined part of the celestial sphere. In the older, narrower meaning of the term, it is a group of fixed stars forming a characteristic pattern. -

14. Mathematics for Orbits: Ellipses, Parabolas, Hyperbolas Michael Fowler
14. Mathematics for Orbits: Ellipses, Parabolas, Hyperbolas Michael Fowler Preliminaries: Conic Sections Ellipses, parabolas and hyperbolas can all be generated by cutting a cone with a plane (see diagrams, from Wikimedia Commons). Taking the cone to be xyz222+=, and substituting the z in that equation from the planar equation rp⋅= p, where p is the vector perpendicular to the plane from the origin to the plane, gives a quadratic equation in xy,. This translates into a quadratic equation in the plane—take the line of intersection of the cutting plane with the xy, plane as the y axis in both, then one is related to the other by a scaling xx′ = λ . To identify the conic, diagonalized the form, and look at the coefficients of xy22,. If they are the same sign, it is an ellipse, opposite, a hyperbola. The parabola is the exceptional case where one is zero, the other equates to a linear term. It is instructive to see how an important property of the ellipse follows immediately from this construction. The slanting plane in the figure cuts the cone in an ellipse. Two spheres inside the cone, having circles of contact with the cone CC, ′, are adjusted in size so that they both just touch the plane, at points FF, ′ respectively. It is easy to see that such spheres exist, for example start with a tiny sphere inside the cone near the point, and gradually inflate it, keeping it spherical and touching the cone, until it touches the plane. Now consider a point P on the ellipse.