Crystal Structure and Dynamics Paolo G
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In Order for the Figure to Map Onto Itself, the Line of Reflection Must Go Through the Center Point
3-5 Symmetry State whether the figure appears to have line symmetry. Write yes or no. If so, copy the figure, draw all lines of symmetry, and state their number. 1. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The figure has reflectional symmetry. In order for the figure to map onto itself, the line of reflection must go through the center point. Two lines of reflection go through the sides of the figure. Two lines of reflection go through the vertices of the figure. Thus, there are four possible lines that go through the center and are lines of reflections. Therefore, the figure has four lines of symmetry. eSolutionsANSWER: Manual - Powered by Cognero Page 1 yes; 4 2. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure does not have reflectional symmetry. There is no way to fold or reflect it onto itself. ANSWER: no 3. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure has reflectional symmetry. The figure has a vertical line of symmetry. It does not have a horizontal line of symmetry. The figure does not have a line of symmetry through the vertices. Thus, the figure has only one line of symmetry. ANSWER: yes; 1 State whether the figure has rotational symmetry. Write yes or no. If so, copy the figure, locate the center of symmetry, and state the order and magnitude of symmetry. -

Thermoelectric and Transport Properties of Delafossite Cucro2
Thermoelectric and transport properties of Delafossite CuCrO2:Mg thin films prepared by RF magnetron sputtering Inthuga Sinnarasa, Yohann Thimont, Lionel Presmanes, Antoine Barnabé, Philippe Tailhades To cite this version: Inthuga Sinnarasa, Yohann Thimont, Lionel Presmanes, Antoine Barnabé, Philippe Tailhades. Ther- moelectric and transport properties of Delafossite CuCrO2:Mg thin films prepared by RF magnetron sputtering. Nanomaterials, MDPI, 2017, 7 (7), pp.157. 10.3390/nano7070157. hal-01754780 HAL Id: hal-01754780 https://hal.archives-ouvertes.fr/hal-01754780 Submitted on 30 Mar 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Open Archive TOULOUSE Archive Ouverte ( OATAO ) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is a publisher’s version published in : http://oatao.univ-toulouse.fr/ Eprints ID : 19788 To link to this article : DOI:10.3390/nano7070157 URL : http://dx.doi.org/10.3390/nano7070157 To cite this version : Sinnarasa, Inthuga and Thimont, Yohann and Presmanes, Lionel and Tailhades, Philippe Thermoelectric and transport properties of Delafossite CuCrO2:Mg thin films prepared by RF magnetron sputtering . (2017) Nanomaterials, vol. -

Delafossite Cu1+Fe3+O2
1+ 3+ Delafossite Cu Fe O2 c 2001-2005 Mineral Data Publishing, version 1 Crystal Data: Hexagonal. Point Group: 32/m. Crystals tabular on {0001}, to 8 mm; also equant, bounded by {0001} and {1011}; as botryoidal crusts, spherulitic, powdery, massive. Twinning: On {0001}, as contact twins. Physical Properties: Cleavage: {1011}, imperfect. Tenacity: Brittle. Hardness = 5.5 D(meas.) = 5.41 D(calc.) = 5.52 Weakly magnetic. Optical Properties: Opaque. Color: Black; pale brownish rose in reflected light. Streak: Black. Luster: Metallic. Optical Class: Uniaxial. Pleochroism: Distinct; O = pale golden brown; E = rose-brown. Anisotropism: Strong. R1–R2: (400) 18.4–22.2, (420) 18.6–22.3, (440) 18.8–22.4, (460) 19.0–22.6, (480) 19.0–22.9, (500) 18.9–23.2, (520) 19.0–23.4, (540) 19.0–23.4, (560) 19.1–23.2, (580) 19.2–23.0, (600) 19.3–23.0, (620) 19.6–23.2, (640) 20.0–23.5, (660) 20.6–23.8, (680) 21.1–24.2, (700) 21.8–24.8 Cell Data: Space Group: R3m. a = 3.02–3.04 c = 17.10–17.12 Z = 3 X-ray Powder Pattern: Locality unknown. (ICDD 12-752). 2.508 (100), 1.512 (40), 2.86 (35), 1.658 (35), 2.238 (25), 1.434 (20), 2.58 (18) Chemistry: (1) (2) (3) Cu 42.14 41.32 41.97 Fe 33.56 37.26 36.89 O [19.74] [21.21] 21.14 rem. 3.52 0.21 Total [98.96] [100.00] 100.00 (1) Yekaterinburg, Russia; remnant is Al2O3. -

Types of Lattices
Types of Lattices Types of Lattices Lattices are either: 1. Primitive (or Simple): one lattice point per unit cell. 2. Non-primitive, (or Multiple) e.g. double, triple, etc.: more than one lattice point per unit cell. Double r2 cell r1 r2 Triple r1 cell r2 r1 Primitive cell N + e 4 Ne = number of lattice points on cell edges (shared by 4 cells) •When repeated by successive translations e =edge reproduce periodic pattern. •Multiple cells are usually selected to make obvious the higher symmetry (usually rotational symmetry) that is possessed by the 1 lattice, which may not be immediately evident from primitive cell. Lattice Points- Review 2 Arrangement of Lattice Points 3 Arrangement of Lattice Points (continued) •These are known as the basis vectors, which we will come back to. •These are not translation vectors (R) since they have non- integer values. The complexity of the system depends upon the symmetry requirements (is it lost or maintained?) by applying the symmetry operations (rotation, reflection, inversion and translation). 4 The Five 2-D Bravais Lattices •From the previous definitions of the four 2-D and seven 3-D crystal systems, we know that there are four and seven primitive unit cells (with 1 lattice point/unit cell), respectively. •We can then ask: can we add additional lattice points to the primitive lattices (or nets), in such a way that we still have a lattice (net) belonging to the same crystal system (with symmetry requirements)? •First illustrate this for 2-D nets, where we know that the surroundings of each lattice point must be identical. -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

Chapter 4, Bravais Lattice Primitive Vectors
Chapter 4, Bravais Lattice A Bravais lattice is the collection of all (and only those) points in space reachable from the origin with position vectors: n , n , n integer (+, -, or 0) r r r r 1 2 3 R = n1a1 + n2 a2 + n3a3 a1, a2, and a3 not all in same plane The three primitive vectors, a1, a2, and a3, uniquely define a Bravais lattice. However, for one Bravais lattice, there are many choices for the primitive vectors. A Bravais lattice is infinite. It is identical (in every aspect) when viewed from any of its lattice points. This is not a Bravais lattice. Honeycomb: P and Q are equivalent. R is not. A Bravais lattice can be defined as either the collection of lattice points, or the primitive translation vectors which construct the lattice. POINT Q OBJECT: Remember that a Bravais lattice has only points. Points, being dimensionless and isotropic, have full spatial symmetry (invariant under any point symmetry operation). Primitive Vectors There are many choices for the primitive vectors of a Bravais lattice. One sure way to find a set of primitive vectors (as described in Problem 4 .8) is the following: (1) a1 is the vector to a nearest neighbor lattice point. (2) a2 is the vector to a lattice points closest to, but not on, the a1 axis. (3) a3 is the vector to a lattice point nearest, but not on, the a18a2 plane. How does one prove that this is a set of primitive vectors? Hint: there should be no lattice points inside, or on the faces (lll)fhlhd(lllid)fd(parallolegrams) of, the polyhedron (parallelepiped) formed by these three vectors. -

Metal Oxide-Based Transparent Conducting Oxides Meagen Anne Gillispie Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 2006 Metal oxide-based transparent conducting oxides Meagen Anne Gillispie Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Materials Science and Engineering Commons Recommended Citation Gillispie, Meagen Anne, "Metal oxide-based transparent conducting oxides " (2006). Retrospective Theses and Dissertations. 1891. https://lib.dr.iastate.edu/rtd/1891 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. UMI Number: 3243848 UMI Microform 3243848 Copyright 2007 by ProQuest Information and Learning Company. All rights reserved. This microform edition is protected against unauthorized copying under Title 17, United States Code. ProQuest Information and Learning Company 300 North Zeeb Road P.O. Box 1346 Ann Arbor, MI 48106-1346 Metal oxide-based transparent conducting oxides by Meagen Anne Gillispie A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: Materials Science and Engineering Program of Study Committee: David Cann, Co-major Professor Xiaoli Tan, Co-major Professor Mufit Akinc Vikram -

Chapter 1 – Symmetry of Molecules – P. 1
Chapter 1 – Symmetry of Molecules – p. 1 - 1. Symmetry of Molecules 1.1 Symmetry Elements · Symmetry operation: Operation that transforms a molecule to an equivalent position and orientation, i.e. after the operation every point of the molecule is coincident with an equivalent point. · Symmetry element: Geometrical entity (line, plane or point) which respect to which one or more symmetry operations can be carried out. In molecules there are only four types of symmetry elements or operations: · Mirror planes: reflection with respect to plane; notation: s · Center of inversion: inversion of all atom positions with respect to inversion center, notation i · Proper axis: Rotation by 2p/n with respect to the axis, notation Cn · Improper axis: Rotation by 2p/n with respect to the axis, followed by reflection with respect to plane, perpendicular to axis, notation Sn Formally, this classification can be further simplified by expressing the inversion i as an improper rotation S2 and the reflection s as an improper rotation S1. Thus, the only symmetry elements in molecules are Cn and Sn. Important: Successive execution of two symmetry operation corresponds to another symmetry operation of the molecule. In order to make this statement a general rule, we require one more symmetry operation, the identity E. (1.1: Symmetry elements in CH4, successive execution of symmetry operations) 1.2. Systematic classification by symmetry groups According to their inherent symmetry elements, molecules can be classified systematically in so called symmetry groups. We use the so-called Schönfliess notation to name the groups, Chapter 1 – Symmetry of Molecules – p. 2 - which is the usual notation for molecules. -

Insights on the Stability and Cationic Nonstoichiometry of Cufeo2 Delafossite
Open Archive Toulouse Archive Ouverte OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible This is an author’s version published in: http://oatao.univ-toulouse.fr/24270 Official URL: https://doi.org/10.1021/acs.inorgchem.9b00651 To cite this version: Pinto, Juliano Schorne and Cassayre, Laurent and Presmanes, Lionel and Barnabé, Antoine Insights on the Stability and Cationic Nonstoichiometry of CuFeO2 Delafossite. (2019) Inorganic Chemistry, 58 (9). 6431-6444. ISSN 0020-1669 Any correspondence concerning this service should be sent to the repository administrator: [email protected] Insights on the Stability and Cationic Nonstoichiometry of CuFeO2 Delafossite Juliano Schorne-Pinto,†,‡ Laurent Cassayre,† Lionel Presmanes,‡ and Antoine Barnabe*́,‡ † Laboratoire de Genié Chimique, Universitéde Toulouse, CNRS, Toulouse, France ‡ CIRIMAT, Universitéde Toulouse, CNRS, UniversitéPaul Sabatier, 118 Route de Narbonne, 31062 Toulouse, Cedex 9, France *S Supporting Information ABSTRACT: CuFeO2, the structure prototype of the delafossite family, has received renewed interest in recent years. Thermodynamic modeling and several experimental Cu−Fe−O system investigations did not focus specifically on the possible nonstoichiometry of this compound, which is, nevertheless, a very important optimization factor for its physicochemical properties. In this work, through a complete set of analytical and thermostructural techniques from 50 to 1100 °C, a fine reinvestigation of some specific regions of the Cu−Fe−O phase diagram under air was carried out to clarify discrepancies concerning the delafossite CuFeO2 stability region as well as the eutectic composition and temperature for the reaction L = ff ’ CuFeO2 +Cu2O. -

Pose Estimation for Objects with Rotational Symmetry
Pose Estimation for Objects with Rotational Symmetry Enric Corona, Kaustav Kundu, Sanja Fidler Abstract— Pose estimation is a widely explored problem, enabling many robotic tasks such as grasping and manipulation. In this paper, we tackle the problem of pose estimation for objects that exhibit rotational symmetry, which are common in man-made and industrial environments. In particular, our aim is to infer poses for objects not seen at training time, but for which their 3D CAD models are available at test time. Previous X 2 X 1 X 2 X 1 work has tackled this problem by learning to compare captured Y ∼ 2 Y ∼ 2 Y ∼ 2 Y ∼ 2 views of real objects with the rendered views of their 3D CAD Z ∼ 6 Z ∼ 1 Z ∼ Z ∼ 1 ∼ ∼ ∼ ∞ ∼ models, by embedding them in a joint latent space using neural Fig. 1. Many industrial objects such as various tools exhibit rotational networks. We show that sidestepping the issue of symmetry symmetries. In our work, we address pose estimation for such objects. in this scenario during training leads to poor performance at test time. We propose a model that reasons about rotational symmetry during training by having access to only a small set of that this is not a trivial task, as the rendered views may look symmetry-labeled objects, whereby exploiting a large collection very different from objects in real images, both because of of unlabeled CAD models. We demonstrate that our approach different background, lighting, and possible occlusion that significantly outperforms a naively trained neural network on arise in real scenes. -
12-5 Worksheet Part C
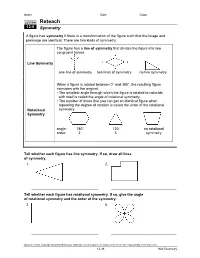
Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry A figure has symmetry if there is a transformation of the figure such that the image and preimage are identical. There are two kinds of symmetry. The figure has a line of symmetry that divides the figure into two congruent halves. Line Symmetry one line of symmetry two lines of symmetry no line symmetry When a figure is rotated between 0° and 360°, the resulting figure coincides with the original. • The smallest angle through which the figure is rotated to coincide with itself is called the angle of rotational symmetry. • The number of times that you can get an identical figure when repeating the degree of rotation is called the order of the rotational Rotational symmetry. Symmetry angle: 180° 120° no rotational order: 2 3 symmetry Tell whether each figure has line symmetry. If so, draw all lines of symmetry. 1. 2. _________________________________________ ________________________________________ Tell whether each figure has rotational symmetry. If so, give the angle of rotational symmetry and the order of the symmetry. 3. 4. _________________________________________ ________________________________________ Original content Copyright © by Holt McDougal. Additions and changes to the original content are the responsibility of the instructor. 12-38 Holt Geometry Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry continued Three-dimensional figures can also have symmetry. Symmetry in Three Description Example Dimensions A plane can divide a figure into two Plane Symmetry congruent halves. There is a line about which a figure Symmetry About can be rotated so that the image and an Axis preimage are identical. -

Interfacial Stabilization for Epitaxial Cucro2 Delafossites
www.nature.com/scientificreports OPEN Interfacial stabilization for epitaxial CuCrO2 delafossites Jong Mok Ok1,3, Sangmoon Yoon1,3, Andrew R. Lupini2, Panchapakesan Ganesh2, Matthew F. Chisholm2 & Ho Nyung Lee1* ABO2 delafossites are fascinating materials that exhibit a wide range of physical properties, including giant Rashba spin splitting and anomalous Hall efects, because of their characteristic layered structures composed of noble metal A and strongly correlated BO2 sublayers. However, thin flm synthesis is known to be extremely challenging owing to their low symmetry rhombohedral structures, which limit the selection of substrates for thin flm epitaxy. Hexagonal lattices, such as those provided by Al2O3(0001) and (111) oriented cubic perovskites, are promising candidates for epitaxy of delafossites. However, the formation of twin domains and impurity phases is hard to suppress, and the nucleation and growth mechanisms thereon have not been studied for the growth of epitaxial delafossites. In this study, we report the epitaxial stabilization of a new interfacial phase formed during pulsed-laser epitaxy of (0001)-oriented CuCrO2 epitaxial thin flms on Al2O3 substrates. Through a combined study using scanning transmission electron microscopy/electron- energy loss spectroscopy and density functional theory calculations, we report that the nucleation of a thermodynamically stable, atomically thick CuCr1−xAlxO2 interfacial layer is the critical element for the epitaxy of CuCrO2 delafossites on Al2O3 substrates. This fnding provides key insights into the thermodynamic mechanism for the nucleation of intermixing-induced bufer layers that can be used for the growth of other noble-metal-based delafossites, which are known to be challenging due to the difculty in initial nucleation.