Abstracts of the Student Research Conference 2020
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Making Mathematics with Needlework
i i making mathematics with needlework i i i i i i i i making mathematics with needlework ten papers and ten projects edited by SARAH-MARIE BELCASTRO CAROLYN YACKEL A K Peters, Ltd. Wellesley, Massachusetts i i CRC Press Taylor & Francis Group 6000 Broken Sound Parkway NW, Suite 300 Boca Raton, FL 33487-2742 © 2007 by Taylor & Francis Group, LLC CRC Press is an imprint of Taylor & Francis Group, an Informa business No claim to original U.S. Government works Version Date: 20140130 International Standard Book Number-13: 978-1-4398-6513-2 (eBook - PDF) This book contains information obtained from authentic and highly regarded sources. Reasonable efforts have been made to publish reliable data and information, but the author and publisher cannot assume responsibility for the validity of all materials or the consequences of their use. The authors and publishers have attempted to trace the copyright holders of all material reproduced in this publication and apologize to copyright holders if permission to publish in this form has not been obtained. If any copyright material has not been acknowledged please write and let us know so we may rectify in any future reprint. Except as permitted under U.S. Copyright Law, no part of this book may be reprinted, reproduced, transmitted, or utilized in any form by any electronic, mechanical, or other means, now known or hereafter invented, including photocopying, microfilming, and recording, or in any information storage or retrieval system, without written permission from the publishers. For permission to photocopy or use material electronically from this work, please access www.copyright.com (http://www.copyright.com/) or contact the Copyright Clearance Center, Inc. -

Knoten-Topologie Analysis Situs Graph Theory
algebraische Topologie geometrische Topologie J. Piaget Rotman Form-Klischee: Hsiang Grotemeyer Brian (JJJJ) / (2012) Jeffrey (1970) Wu-Chung (1935) Topology, Algebra, Diagrams Brock Topologie Möbius-Schleife Karl Peter (1927-1992) Dress Differentialtop. Gronow Prassolow Eine Darstellung zur Mathematik-Geschichte Buch: Topologie (1969) Michail Leonidowitsch (1943) Adem Bunke Wedrich Andreas (1938) V. (JJJJ) Buch: Toenniessen Gruppenanalyse Kleinsche Flasche Morava Topologie in Bildern Schroth Alejandro (1961) Ulrich (1963) Fridtjof (2017) Topologie Paul (JJJJ) als Kontext kulturwissenschaftlicher Entwicklungen Symplektische Topologie inkl. Anwendungsfelder Topologie Topologie Lesebuch Topologie History of Topology (1999) Edited by I.M. James Jack (1944) Algebraische Andreas E. (JJJJ) Buch: Kai Peter Denker Topologie Topological circle planes and TOPOLOGIE Brown topological quadrangles Aktuelle Forschungsgebiete zur Topologie: Schwerpunkte: Mazur Hatcher William (1978) Mathematik, Strukturwissenschaften Morton (1931) Floyd 54 Allgemeine Topologie Barry C. (1937) Topologie / Geometr. Gruppentheorie https://de.wikipedia.org/wiki/Kategorie:Topologe_(20._Jahrhundert) 55 Algebraische Topologie Philosophie, Strukturalismus Geometrische Geometrische Allen (1944) https://de.wikipedia.org/wiki/Kategorie:Topologe_(21._Jahrhundert) Gestalttheorie, Feldtheorien Topologie Hirsch Weinberger 57 Differentialtopologie Topologie Haagerup Geometrische Scott Saito D. Epstein s.l. Canary Minsky Soziologie, Kulturwissenschaften Heffter Ulrich (1943-2005) Topologie -

Volume 45 Number 2 2018 the Australian Mathematical Society Gazette
Volume 45 Number 2 2018 The Australian Mathematical Society Gazette David Yost and Sid Morris (Editors) Eileen Dallwitz (Production Editor) Gazette of AustMS, Faculty of Science & Technology, E-mail: [email protected] Federation University Australia, PO Box 663, Web: www.austms.org.au/gazette Ballarat,VIC3353,Australia Tel:+61353279086 The individual subscription to the Society includes a subscription to the Gazette. Libraries may arrange subscriptions to the Gazette by writing to the Treasurer. The cost for one volume con- sisting of five issues is AUD 118.80 for Australian customers (includes GST), AUD 133.00 (or USD 141.00) for overseas customers (includes postage, no GST applies). The Gazette publishes items of the following types: • Reviews of books, particularly by Australian authors, or books of wide interest • Classroom notes on presenting mathematics in an elegant way • Items relevant to mathematics education • Letters on relevant topical issues • Information on conferences, particularly those held in Australasia and the region • Information on recent major mathematical achievements • Reports on the business and activities of the Society • Staff changes and visitors in mathematics departments • News of members of the Australian Mathematical Society Local correspondents submit news items and act as local Society representatives. Material for publication and editorial correspondence should be submitted to the editors. Any communications with the editors that are not intended for publication must be clearly identified as such. Notes for contributors Please send contributions to [email protected]. Submissions should be fairly short, easy to read and of interest to a wide range of readers. Please typeset technical articles using LATEX or variants. -
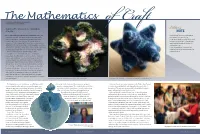
The Mathematics of Craft
The Mathematics BY JEANETTE MCLEOD AND PHIL WILSON, CHRISTCHURCH, NEW ZEALAND Using craft to unravel the complexities of maths. Editor’sNOTE Enjoy craft? Then you probably enjoy mathematics too, you The Auckland Museum is planning an just may not know it. This was the idea behind the recent even bigger Festival next year. Maths Craft Festival, a weekend-long festival held at the For more information on the Maths Craft Auckland Museum, celebrating the many links between of Craft Festival, or to find links to the patterns mathematics and craft. The Festival was the creation of three mentioned in this article, please visit mathematicians: Drs Jeanette McLeod and Phil Wilson from the mathscraftnz.org. University of Canterbury, and Dr Julia Collins from the University To talk to Jeanette about maths and of Edinburgh, and was the first of its kind in New Zealand. crafts write to her at jeanette.mcleod@ The trio were inspired to start the festival after a canterbury.ac.nz serendipitous encounter while Julia was on holiday in Christchurch from Edinburgh. Jeanette and Julia – both avid knitters and crocheters – wanted to find a way to share the beautiful mathematics behind craft with the public. Many people have a mental block when it comes to mathematics, and yet it is all around us and we use it every day. Especially those of us who craft. Mathematics is much more than just fractions and calculus – it is present in the repeats and symmetries of a pattern, the folds of a crocheted or knitted ruffle, and the arrangement of squares in a blanket. -

Use Style: Paper Title
SCIENAR VIRTUAL COMMUNITY: A USEFUL TOOL TO PROMOTE THE SYNERGIES AMONG ARTISTS AND SCIENTISTS SCIENAR Virtual Community: A Useful Tool to Promote the Synergies Among Artists and Scientists doi:10.3991/ijoe.v6i2.1293 I. Alfano, M. Carini, L. Gabriele, and G. Naccarato University of Calabria, Arcavacata di Rende (CS), Italy Abstract—This paper describes a Virtual Community (VC) terpreting the perceived world in order to facilitate a com- developed within the framework of the European project prehension of some unknown fragments of reality [3-4]. SCIENAR (Scientific Scenarios and Art). The SCIENAR But the most obvious connection between science and project explores the connections between Art and Science art is probably the fact that they are two activities dealing and the use of new media and Information Communication with the representation of the world: while art is inspired Technologies (ICTs) for the exploration and representation by nature in its forms, science uses art in order to facilitate of these relationships in an innovative and productive way. understanding of certain concepts, sometimes very com- The main objective of the Virtual Community described plex. herein is to strengthen the role of the “artistic-scientific” community in the production of new science and new art. Today, while scientists and researchers find often in the This objective can be achieved by promoting synergies and art field an ideal place to better communicate their collaborations between the different protagonists involved in achievements, more and more artists draw inspiration the large field of research of Art and Science. from science by exploring different disciplines, for in- stance, biology [5]. -

Critical Pointmathematical Bridges
physicsworld.com Comment: Robert P Crease Critical Point Mathematical bridges Physicists should learn from the wife-and-husband team now in the Depart- ment of Mathematics at the University of mathematics community’s Auckland, whose work includes a crochet annual Bridges conferences, version of Lorentz’s equations describing the behaviour of chaotic systems. says Robert P Crease Other talks concern quilting, the physics of tops, 4D geometry, the architecture of Mathematicians from around the world mosques, the mathematics of juggling and will be converging on the Korean capital torus-knot carbon nanotubes – structures of Seoul next month to attend the largest made of beads that could also be made of international conference in the mathemati- carbon atoms. One speaker will also unveil cal community. Held every four years, the the first ever sculpture whose symmetry is International Congress of Mathematicians the same as that of a “quaternion group”. (ICM) attracts several thousand partici- pants. One highlight is the announcement Hinke OsingaThe and Bernd Krauskopf, University of Aucklandcritical point of the Fields medal, which is regarded as To me the Bridges events are fascinating. the highest award a mathematician can But why can physics not do something simi- achieve and is dubbed (along with the Abel Linked in Art meets maths in this crochet Lorentz lar? After all, its bridges with artistic and Prize) the “mathematician’s Nobel”. model to be presented at the Bridges conference. other creative disciplines already exist. As But elsewhere in Seoul, another event Hart puts it, by creating bridges to painting, will be unfolding at the same time, called M C Escher). -
The Christchurch Maths Craft Day Free Public Talks
The Christchurch Maths Craft Day Free Public Talks 11am Four Colours are Enough Jeanette McLeod, University of Canterbury 1pm Zigzags, Fractals, and Pleating Michael Langton, University of Canterbury 3pm Chaos in Crochet and Steel Bernd Krauskopf & Hinke Osinga, University of Auckland The Recital Room Chemistry Building 23 May 2021 Maths meets craft in this series of public talks, accessible to everyone! Public Talk Summaries All talks will be held in the Recital Room in the Chemistry Building. Four Colours are Enough (Dr Jeanette McLeod) How many colours are needed to colour a map so that no two regions sharing a border are coloured with the same colour? What if you had to use the fewest number of colours possible? Mathematicians took over 100 years to find the answer to this question, and the result is one of the most controversial theorems of the 20th century! In this talk we will discuss the history of the infamous Four Colour Theorem, explain why mathematicians have struggled with it so much, and explore its links with crafts such as knitting, quilting, and colouring. Zigzags, Fractals, and Pleating (Dr Michael Langton) Pleating fabric is a mathematically fascinating and historically fashionable craft involving folded patterns that often look like zigzags. Everyone understands zigzags, but how do you make folding zigzags efficient? What happens if the zigs and zags don't alternate perfectly? What happens if you do infinitely many of them? How do you fold a two-dimensional zigzag? What even is a two-dimensional zigzag? How many different fold patterns are possible? Exploring the answers to these questions will take us through papercraft, fractals, and the mechanics of pleating fabric yourself. -
Programme and Abstracts Table of Contents
New Zealand Mathematical Society Colloquium 2017 5 7 December 2017 Programme and Abstracts Table of contents Welcome1 Local Information2 Talks and Prizes2 Campus Map3 Food and Wednesday Colloquium Dinner Information4 Time Table5 Tuesday 5 December: morning sessions6 Tuesday 5 December: afternoon sessions7 Wednesday 6 December: morning sessions8 Wednesday 6 December: afternoon sessions9 Thursday 7 December: morning sessions 11 Thursday 7 December: afternoon sessions 12 Abstracts 13 Invited presentations 13 Poster presentations 16 Contributed presentations 21 List of participants 60 Cover image: Gannets at Muriwai Photograph by Bernd Krauskopf Welcome Welcome to the 2017 New Zealand Mathematics Colloquium! There is an excellent programme of lectures and events, and we hope that you will enjoy the conference hosted by the University of Auckland. We are very grateful for sponsorship from: Department of Mathematics, University of Auckland • Te P¯unahaMatatini, University of Auckland • The New Zealand Mathematical Society • ANZIAM (Australia and New Zealand Industrial and Applied Mathematics) • Operations Research Society of New Zealand • Extra special thanks are due to John Shanks of the NZMS for running the conference webpage and registration system, and Tama Ngahere of the Department of Mathematics for all the administrative help. Conference Organising Committee Hinke Osinga (co-chair) Tom ter Elst (co-chair) Anna Barry Golbon Zakeri Bernd Krauskopf Igor Kontorovich Caroline Yoon Steven Galbraith 1 Local Information Please, ask one of the organisers if you have any questions; they have orange name badges. In case of medical emergencies: QuayMed Accident and Medical Ground floor of QuayPark Health 68 Beach Road, Central Auckland Phone: (09) 919 2555 Internet Wireless internet access is available in the conference area via Eduroam. -
Mathematical Art Powerpoint As
Mathemacs & Art By various mathemacal ar'sts Assembled by Carolyn Yackel Mercer University Sco Kim: ambigram inversion Chris Palmer: Flower Tower Origami Fold Sco= Kim: Infinity Circle Doug Dunham—Circle Limit III type paern Bob Bosch--Untled Rinus Roelof—Knot Robert Fathauer—Twice Iterated Knot No. 1 Rinus Roelofs—Single surface Rinus Roelofs—Tapestry Rinus Roelofs—3D tapestry Anne Burns—Produced by a subgroup of Mobius TransformaFons M.C.Escher: Metamorphosis Craig Kaplan—Parquet Deformaons Craig Kaplan, top; Florence Turnour, beads, boom—Parquet Deformaons Akio Hizume: Fibonacci Tower Akio Hizume: Fibonacci Tower Helaman Ferguson—Fibonacci Box II Anamorphosis onto a sphere (From Make mag., flickr fdecomite) Anamorphosis onto a cylinder Tom Hull Daina Taimina—Crocheted Hyperbolic Surface Paul Prudence: Talysis II Paul Prudence: Talysis II another view Daina Taimina—Crocheted Hyperbolic Surface Helaman Ferguson: Figure Eight Knot Complement George Hart photo: Cu[ng a Bagel into two linked halves Helaman Ferguson: Incised Torus Wild Sphere Carlos Seguin: 48 Bird Tetrus Bjarne Jespersen—Dual Plane Toroid Helaman Ferguson: Torus and Crosscap Emily Peters: Knied Cross-Cap Carlo Seguin: Boy’s Surface Chaim Goodman-Strauss--*632 tessellaFon Chris Palmer Jeannine Mosley: Origami TessellaFon Chaim Goodman-Strauss—632 tessellaon Jeanine Mosley: Herringbone Origami TessellaFon Robert Fathauer: Seahorses and Eeels Irena Swanson—quilted semi-regular tessellaons Chris Palmer—Shadowfold *632 TessellaFon Craig Kaplan—Vornoi Diagram Te chief reason for -
The Martinborough Maths Craft Day Free Public Talks
The Martinborough Maths Craft Day Free Public Talks 11am Chaos, Kayaking and Crochet Hinke Osinga, University of Auckland 1pm Beyond Infinity Eugenia Cheng, School of the Art Institute of Chicago 3pm From Maths to Art and Chaos to Steel Bernd Krauskopf, University of Auckland The Supper Room The Waihinga Centre 26 May 2019 Public Talk Summaries All talks are in the Supper Room at the Waihinga Centre. Chaos, Kayaking and Crochet (Prof Hinke Osinga) Hinke Osinga is Professor in Applied Mathematics at the University of Auckland. Her research in dynamical systems theory became well known to the general public in 2004, when she turned her computer-generated images of chaotic behaviour into a crocheted model, called the crocheted Lorenz manifold. The Lorenz manifold is a surface with an intriguing geometry that signifies the unpredictability of chaotic behaviour; it arises from a set of mathematical equations that represent a much simplified model for weather prediction. At over 25,000 stitches, the crocheted piece is about a metre wide and has been the subject of considerable media attention world wide. After this talk, maybe you would like to crochet your own! Beyond Infinity (Dr Eugenia Cheng) How big is the universe? How many numbers are there? And is infinity + 1 the same as 1 + infinity? Such questions occur to young children and our greatest minds. And they are all the same question: What is infinity? In this talk we will go on a staggering journey from elemental math to its loftiest abstractions. Along the way, we will consider how to make infinite music, how to take infinite selfies, how to create infinite cookies from a finite ball of dough, and how one little symbol holds the biggest idea of all. -

Betriebssystem Kunst
diagrammgestützte Bildanalysen Betriebssystem Kunst RANKING im Feld Felix Thürlemann Claudia Blümle art diagrams in context Spielregeln der Kunst Quantifying reputation and success in art Max Imdahl Robert Jelinke (Kunst Filz) Charles Bouleau G. Dirmoser (Parasitenrad) Diderot/Rosenberg Die Rolle der Diagramme im Feld der Kunst Alvaro Terrone (Prozeßdiagramm Performance) Anwendungsfelder R. Zendron (100 Jahre MAERZ Linz u. Kunst UNI) Studie 01-12/2018 Ulf Wuggenig, Vera Kockot (Bourdieu Analysen) Netzwerk der Einflüsse Widmung: Holger Jagersberger @ Salzamt Linz N.N. (150 Jahre Angewandte Wien) ISMEN Kunsthistorischer Zugang Yvonne Rainer Bauhaus u. Diagramm Alfred Barr mit Hang zum Mapping Josef Albers R5 Fluxus (…) DADA (…) Herbert Bayer concept art (…) s.u. Walter Gropius Useful Pictures (2008) Hg. Adelheid Mers Context art (…) Johannes Itten turn 2014 Nützliche Bilder – Bild, Diskurs, Evidenz (2014) Rolf F. Nohr kunsthistorische Diagramme Vaszilij Kandinskij Paul Klee Historische Beispiele Camilla Leiteritz Astrit Schmidt-Burkhardt Werkgenealogie Genealogische Nützliche Bilder am Rande der Kunst Hannes Meyer Genealogische Selbsthistorisierung Hermann Pitz Baumdiagramme (u. Netze) vs. Autonome Kunst Vergl. Studie zur ars electronica Laszlo Moholy-Nagy Maciunas (Fluxus), SPUR, IRWIN Oskar Schlemmer ultimate akademie (Köln) Synchronoptische Diagramme Impuls Bauhaus Projekt Die Kunst Schnitte zu setzen s.u. Pinnwand Jens Weber & Andreas Wolter Diagrammatische Versammlung relevante Kunstwissenschaften Entwurfszeichnung Z11 Plurale Bildlichkeit -

Mathematics People
Mathematics People probability and analytic geometry, and number theory. The Saint-Raymond and Scholze prize carries a cash value of 20,000 euros (approximately Awarded 2015 Fermat Prizes US$22,000). Laure Saint-Raymond of Ecole —From a Fermat Prize announcement Normale Supérieure and Peter Scholze of the University of Bonn have been awarded Fer- ICMI Klein and Freudenthal mat Prizes for 2015. Laure Saint-Raymond was honored Medals Awarded for her development of asymp- totic theories of partial differ- Alan J. Bishop of ential equations, including the Monash University fluid limits of rarefied flows, has been awarded multiscale analysis in plasma the 2015 Felix Klein physics equations and ocean Medal of the Interna- tional Commission Laure Saint-Raymond modeling, and the derivation of the Boltzmann equation from on Mathematical In- interacting particle systems. Laure shared with the Notices struction (ICMI) “in her conviction “that research is not a matter of competi- recognition of his tion but rather a collective challenge…. I like the ‘algorithm more than forty- for discovery’ published by [David] Paydarfar and [William] five years of sus- Schwartz in Science (April 2001): Slow down to explore… tained, consistent, Alan J. Bishop Read but not too much… Pursue quality for its own sake… and outstanding life- Cultivate smart time achievements in friends.” mathematics education research and scholarly develop- ment”. The prize citation states that “his book Mathemati- Peter Scholze cal Enculturation: A Cultural Perspective on Mathematics was honored for Education, published in 1988, was groundbreaking in that his invention of it developed a new conception of mathematics—the no- perfectoid spaces tion of mathematics as a cultural product and the cultural and their applica- values that mathematics embodies….