Parameter Based Synthesis of Sign Language
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
![Downloaded by [New York University] at 06:54 14 August 2016 Classic Case Studies in Psychology](https://docslib.b-cdn.net/cover/8368/downloaded-by-new-york-university-at-06-54-14-august-2016-classic-case-studies-in-psychology-738368.webp)
Downloaded by [New York University] at 06:54 14 August 2016 Classic Case Studies in Psychology
Downloaded by [New York University] at 06:54 14 August 2016 Classic Case Studies in Psychology The human mind is both extraordinary and compelling. But this is more than a collection of case studies; it is a selection of stories that illustrate some of the most extreme forms of human behaviour. From the leader who convinced his followers to kill themselves to the man who lost his memory; from the boy who was brought up as a girl to the woman with several personalities, Geoff Rolls illustrates some of the most fundamental tenets of psychology. Each case study has provided invaluable insights for scholars and researchers, and amazed the public at large. Several have been the inspiration for works of fiction, for example the story of Kim Peek, the real Rain Man. This new edition features three new case studies, including the story of Charles Decker who was tried for the attempted murder of two people but acquitted on the basis of a neurological condition, and Dorothy Martin, whose persisting belief in an impending alien invasion is an illuminating example of cognitive dissonance. In addition, each case study is contextualized with more typical behaviour, while the latest thinking in each sub-field is also discussed. Classic Case Studies in Psychology is accessibly written and requires no prior knowledge of psychology, but simply an interest in the human condition. It is a book that will amaze, sometimes disturb, but above all enlighten its readers. Downloaded by [New York University] at 06:54 14 August 2016 Geoff Rolls is Head of Psychology at Peter Symonds College in Winchester and formerly a Research Fellow at Southampton University, UK. -

Formational Units in Sign Languages Sign Language Typology 3
Formational Units in Sign Languages Sign Language Typology 3 Editors Marie Coppola Onno Crasborn Ulrike Zeshan Editorial board Sam Lutalo-Kiingi Irit Meir Ronice Müller de Quadros Roland Pfau Adam Schembri Gladys Tang Erin Wilkinson Jun Hui Yang De Gruyter Mouton · Ishara Press Formational Units in Sign Languages Edited by Rachel Channon Harry van der Hulst De Gruyter Mouton · Ishara Press ISBN 978-1-61451-067-3 e-ISBN 978-1-61451-068-0 ISSN 2192-5186 e-ISSN 2192-5194 Library of Congress Cataloging-in-Publication Data Formational units in sign languages / edited by Rachel Channon and Harry van der Hulst. p. cm. Ϫ (Sign language typology ; 3) Includes bibliographical references and index. ISBN 978-1-61451-067-3 (hbk. : alk. paper) 1. Sign language Ϫ Phonology, Comparative. 2. Grammar, Comparative and general Ϫ Phonology, Comparative. I. Channon, Rachel, 1950Ϫ II. Hulst, Harry van der. P117.F68 2011 419Ϫdc23 2011033587 Bibliographic information published by the Deutsche Nationalbibliothek The Deutsche Nationalbibliothek lists this publication in the Deutsche Nationalbibliografie; detailed bibliographic data are available in the Internet at http://dnb.d-nb.de. Ą 2011 Walter de Gruyter GmbH & Co. KG, Berlin/Boston and Ishara Press, Nijmegen, The Netherlands Printing: Hubert & Co. GmbH & Co. KG, Göttingen ϱ Printed on acid-free paper Printed in Germany www.degruyter.com Contents Introduction: Phonetics, Phonology, Iconicity and Innateness Rachel Channon and Harry van der Hulst ...................................................1 Part I. Observation Marked Hand Configurations in Asian Sign Languages Susan Fischer and Qunhu Gong .................................................................19 The phonetics and phonology of the TİD (Turkish Sign Language) bimanual alphabet Okan Kubus and Annette Hohenberger (University of Hamburg and Middle East Technical University) .......................................................43 Child-directed signing as a linguistic register Ginger Pizer, Richard P. -

SASL Journal, Volume 2, Number 2
Society for American Sign Language Journal Volume 2 Number 2 Article 1 September 2018 SASL Journal, Volume 2, Number 2 Follow this and additional works at: https://tigerprints.clemson.edu/saslj Part of the American Sign Language Commons, and the Education Commons Recommended Citation (2018) "SASL Journal, Volume 2, Number 2," Society for American Sign Language Journal: Vol. 2 : No. 2 , Article 1. Available at: https://tigerprints.clemson.edu/saslj/vol2/iss2/1 This Full Issue is brought to you for free and open access by TigerPrints. It has been accepted for inclusion in Society for American Sign Language Journal by an authorized editor of TigerPrints. For more information, please contact [email protected]. et al.: SASL Journal, Volume 2, Number 2 SASL Journal Volume 2, N umber 2 Fall/Winter 2018 A Society for American Sign Language Publication ISSN: 2474-8277 (online) Published by TigerPrints, 2018 1 Society for American Sign Language Journal, Vol. 2, No. 2 [2018], Art. 1 Society for American Sign Language Journal Volume 2, Number 2 Editor-in-Chief Jody H. Cripps Clemson University Department of Languages – American Sign Language 717 Strode Tower Clemson, SC 29634 [email protected] Fax: 864-656-0258 Copyeditors Betsy McDonald Laura A. Blackburn Georgetown University (Retired) Tidewater Community College Stephen Fitzmaurice Anita Small Clemson University small LANGUAGE CONNECTIONS Society for American Sign Language - Board of Directors Samuel J. Supalla - President Andrew P. J. Byrne - Secretary University of Arizona Framingham State University Harvey Nathanson - Treasurer Karen Alkoby Austin Community College Gallaudet University Gabriel Arellano Jody H. Cripps Georgetown University Clemson University Ronald Fenicle Russell S. -

The Legal Recognition of Sign Languages
MAARTJE DE MEULDER The Legal Recognition of Sign Languages Abstract This article provides an analytical overview of the diferent types of explicit legal recognition of sign languages. Five categories are distin- guished: constitutional recognition, recognition by means of general language legislation, recognition by means of a sign language law or act, recognition by means of a sign language law or act including other means of communication, and recognition by legislation on the functioning of the national language council.The article further describes three categories of implicit (legal) recognition. Sign languages and their users are often ignored in the context of language policy. However, the recognition of sign languages is one of the major concepts addressed in international deaf discourse (De Meulder forthcoming) and is a fairly new area in the feld of (critical) language policy and language rights. The diferent sorts of rights (if any) granted by means of recognition at the national level are illustrative of the ways in which countries accommodate (or neglect to accommodate) linguistic and cultural diversity. Currently about thirty-one countries (of which the majority are European Union member states) have recognized their sign language(s) in legislation on language status and/or language rights.This is the re- sult of Deaf communities’ demand for explicit legal recognition of their languages, often in relation to already existing implicit recognition. The diference is that explicit recognition can make implicit recogni- tion work, strengthen it, or supplement it.1 For the purpose of clarity, “recognition” in this article simply means the according of legal status to sign language in legislation on language status and/or language Maartje De Meulder is a PhD researcher at the University of Jyväskylä, Finland. -

Njit-Etd2005-009
Copyright Warning & Restrictions The copyright law of the United States (Title 17, United States Code) governs the making of photocopies or other reproductions of copyrighted material. Under certain conditions specified in the law, libraries and archives are authorized to furnish a photocopy or other reproduction. One of these specified conditions is that the photocopy or reproduction is not to be “used for any purpose other than private study, scholarship, or research.” If a, user makes a request for, or later uses, a photocopy or reproduction for purposes in excess of “fair use” that user may be liable for copyright infringement, This institution reserves the right to refuse to accept a copying order if, in its judgment, fulfillment of the order would involve violation of copyright law. Please Note: The author retains the copyright while the New Jersey Institute of Technology reserves the right to distribute this thesis or dissertation Printing note: If you do not wish to print this page, then select “Pages from: first page # to: last page #” on the print dialog screen The Van Houten library has removed some of the personal information and all signatures from the approval page and biographical sketches of theses and dissertations in order to protect the identity of NJIT graduates and faculty. ABSTRACT PARAMETER BASED SYNTHESIS OF SIGN LANGUAGE The primary objective of this project is to demonstrate synthesis of signs in American Sign Language with a finite number of parameters. The parameters in this method include 22 key locations, six location modifiers, six orientation indicators, 46 hand shapes, six predefined movements and seven possible end effectors. -

Functional Markers in Sign Languages Sandro Zucchi, Carol Neidle, Carlo Geraci, Quinn Duffy and Carlo Cecchetto
10 Functional markers in sign languages Sandro Zucchi, Carol Neidle, Carlo Geraci, Quinn Duffy and Carlo Cecchetto 1 Lexical morphemes and grammatical morphemes It is a common observation that grammatical morphemes often develop gradually from lexical morphemes.1 Some languages show this fact more transparently than others. For example, Sebba (1997) observes that creoles and pidgins often use lexi- cally contentful elements with the meaning of ‘finish’ or ‘done’ as functional markers signaling that the event described by the sentence occurs before the time of utterance: (1) mo fin mahze (Mauritian Creole) I finish eat ‘I ate.’ (2) me waka kba (Sranan Tongo) I walk finished ‘I had walked.’ (3) mipela I ting olsem i mas dai pinis (Tok Pisin) we him think anyhow him must die finish ‘We think he must have died.’ (4) a don kom (Pidgin of West Africa) I done come ‘I have come.’ Similar examples from other spoken languages are offered by Pfau and Steinbach (2006). In Rama (a spoken language of Nigeria), the verb aktul meaning ‘finish’ is now used as a completive marker, and in Lhasa (spoken in Tibet), the verb tshaa meaning ‘finish’ marks perfective aspect.2 Examples of this sort are also quite common in sign languages.3 For instance, the signs FINISH and FATTO belonging, respectively, to American Sign Language 197 198 Sign Languages (ASL) and Italian Sign Language (LIS), can both occur as lexically contentful main verbs with the meaning of ‘finish’ (or ‘done’) and as aspectual/temporal mor- phemes. Both signs, when acting as grammatical morphemes, also exhibit a pecu- liar behavior with negation and negative quantifiers. -

An Introduction to Psycholinguistics Examines the Psychology of Language As It Relates to Learning, Mind and Brain As Well As to Aspects of Society and Culture
0582505755_cover 5/10/05 8:00 am Page 1 PSYCHOLINGUISTICS AN INTRODUCTION TO General Editors: Geoffrey Leech and Mick Short An Introduction to Psycholinguistics examines the psychology of language as it relates to learning, mind and brain as well as to aspects of society and culture. How do we learn to speak and to understand speech? Is language unique to humans? Does language influence culture? Using non-technical language, and providing concrete examples, the authors explore: • How children learn to speak and read their native language • Deaf language education • Case studies of wild children and animals and what we can learn from these • Second language acquisition, second language teaching methods, and the problems associated with bilingualism • Language and the brain SECOND • The relationship between thought and language EDITION In this new edition the authors propose a radical new theory of grammar – natural grammar – which unlike other theories can account for both speech comprehension and speech production. Also taking into account the extensive growth in theory, research and practice, this new edition is an accessible and focused introduction to the key issues and the latest research in the field of psycholinguistics. Danny D. Steinberg is Professor Emeritus of Surugadai University and has previously taught at University of Hawaii and Rikkyo University. He is author of a number of books on semantic theory and psycholinguistics, including Semantics: An Interdisciplinary Reader in Philosophy, Linguistics and Psychology (with L. Jakobovits, 1971) and Psycholinguistics: Language, Mind and World (with H. Nagata and D. Aline, 2nd edition, 2000). Natalia V. Sciarini is an independent researcher, writer and translator, and works at the Research Services and Collections Department at Yale University. -

Parts of Speech in Russian Sign Language the Role of Iconicity and Economy
Parts of speech in Russian Sign Language The role of iconicity and economy Vadim Kimmelman Russian State University for the Humanities, Moscow In this paper, we present data that shed light on the parts of speech system of Russian Sign Language (RSL), in particular, the noun-verb distinction. An experimental study revealed that in RSL, specific phonological differences distinguish between nouns and verbs; these include differences in movement, handshape, orientation, location, and mouthing. The attested differences, which are subject to variation among the signers, can co-occur with each other. The patterns we found cannot be accounted for by models that have previously been proposed for other sign languages (e.g. American Sign Language and Austra- lian Sign Language). We argue that these differences may result from the higher iconicity of verbs and the higher economy of nouns. Keywords: parts of speech, Russian Sign Language, nouns, verbs, phonology, iconicity 1. Introduction Russian Sign Language (RSL) is the language of the Deaf in Russia and some other countries of the former Soviet Union. To date, only few studies are available that investigate aspects of the linguistic structure of RSL (Zajtseva & Frumkina 1981; Grenoble 1992; Zajtseva 2006; Prozorova 2007; Kimmelman 2009). During the last few years, some research has also been conducted by several undergraduate students of Moscow State University and Russian State University for the Humanities. In the area of morphological typology, one of the most important questions concerns the identification and typology of word classes in the world’s languages (e.g. Evans 2000; Haspelmath 2001). Across languages, two main word classes or parts of speech are verbs and nouns, but there are some languages which appear not to distinguish between those two classes, for example, Mundari, Salish, and others (Evans 2000). -

Sign Languages
200-210 Sign languages 200 Arık, Engin: Describing motion events in sign languages. – PSiCL 46/4, 2010, 367-390. 201 Buceva, Pavlina; Čakărova, Krasimira: Za njakoi specifiki na žestomimičnija ezik, izpolzvan ot sluchouvredeni lica. – ESOL 7/1, 2009, 73-79 | On some specific features of the sign language used by children with hearing disorders. 202 Dammeyer, Jesper: Tegnsprogsforskning : om tegnsprogets bidrag til viden om sprog. – SSS 3/2, 2012, 31-46 | Sign language research : on the contribution of sign language to the knowledge of languages | E. ab | Electronic publ. 203 Deaf around the world : the impact of language / Ed. by Gaurav Mathur and Donna Jo Napoli. – Oxford : Oxford UP, 2011. – xviii, 398 p. 204 Fischer, Susan D.: Sign languages East and West. – (34), 3-15. 205 Formational units in sign languages / Ed. by Rachel Channon ; Harry van der Hulst. – Berlin : De Gruyter Mouton ; Nijmegen : Ishara Press, 2011. – vi, 346 p. – (Sign language typology ; 3) | Not analyzed. 206 Franklin, Amy; Giannakidou, Anastasia; Goldin-Meadow, Susan: Negation, questions, and structure building in a homesign system. – Cognition 118/3, 2011, 398-416. 207 Gebarentaalwetenschap : een inleiding / Onder red. van Anne E. Baker ; Beppie van den Bogaerde ; Roland Pfau ; Trude Schermer. – Deventer : Van Tricht, 2008. – 328 p. 208 Kendon, Adam: A history of the study of Australian Aboriginal sign languages. – (50), 383-402. 209 Kendon, Adam: Sign languages of Aboriginal Australia : cultural, semi- otic and communicative perspectives. – Cambridge : Cambridge UP, 2013. – 562 p. | First publ. 1988; cf. 629. 210 Kudła, Marcin: How to sign the other : on attributive ethnonyms in sign languages. – PFFJ 2014, 81-92 | Pol. -
Accessible Communications Guidelines
Date goes here Accessible Communications Guidelines Equality, Diversity and Inclusion Team September 2018 – Version 2.0 Approved by: Contents Introduction…………………………………………………………………........ 2 What are the drivers for these guidelines?.................................................. 2 Who is this guidance for?............................................................................ 2 Information for everyday communications…………………………………… 3 Date goes here Information about patients/service users who communicate in an overseas language..……………………………………………………………. 4-15 Information about patients/service users with and acquired communication or language impairment……………………………………... 16-18 Information about patients/service users with a hearing impairment………………………………………………………………………. 19-28 Information about patients/service users with a visual impairment or those that are blind…………………………………………………….............. 29-32 Information about patients/service users that are Deafblind (Dual Sensory Loss)…………………………………………………………………… 33-35 Information about patients/service users that have a Learning Disability…………………………………………………………………………. 36-40 Information about patients/service users that have Dyslexia……………… 41-45 Appendix 1 – Communication support services available to our patients………………………………………………………………………....... 46-47 Appendix 2 – Interpreting Services Out of Office Hours …......................... 48 Appendix 3 – Tips for working with face-to-face interpreters………………. 49-50 Appendix 4 – Online simulations/tests………………………………………. 51 Appendix 5 - Language -

Pfau I Rohlfing II Rowley III Stepikhov IV Sandler V Özyürek VI Gagne VII
entries are clickable Keynotes Poster session Thu 6th Poster session Fri 7th Pfau I Ciroux 8 Rombouts et al. 23 Headshakes: from Gesture to Grammar Multimodal Communicative Acts: What Gesturing strategies and verbal-visuospa- Rohlfing Words Cannot Do without a Hand tial profiles of atypically developing II children Learning language from the use of Ebert et al. 9 gestures Experimental studies on co-speech gestu- Sako et al. 24 res and their (non-)at-issueness Rowley III Discussion of a Japanese sign language database and its annotation systems with Visual Word Recognition in Deaf Rea- Edward 10 consideration for its use in various areas ders: the interplay between orthographic, Language of the hands: Comparing semantic and phonological information signers and gesturers representation of Schindler & Knopp lexical items 25 Stepikhov IV Multimodal Elements in Students’ Texts – Two Case Studies The effect of individual psychological Evertz 11 profile on syntactic segmentation of spon- The history of the graphematic foot in the Schippling taneous speech 26 writing systems of English and German Editing processes in the transition from Sandler V Gast & Hole 12 speech to writing: The case of Romani The composition of a theatrical sign Annotating deictics and gesticulations: Schüppenhauer & 27 language A data model, a multi-level annotation Stoltmann scheme and software Özyürek VI Divergent rehearsal strategies in DGS- German bilinguals vs. German monolin- Using and Processing Language in Multi- He et al. 13 guals during memory span tasks modal Context The role of body orientation during Gagne gesture-speech integration: Evidence Sümer et al. VII from EEG 28 Multimodality in hearing native signers Signers have better memory than speakers Dupraz Hoetjes et al. -
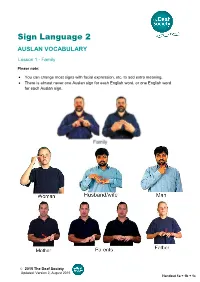
Sign Language 2
Sign Language 2 AUSLAN VOCABULARY Lesson 1 - Family Please note: You can change most signs with facial expression, etc. to add extra meaning. There is almost never one Auslan sign for each English word, or one English word for each Auslan sign. 2015 The Deaf Society Updated: Version 2, August 2015 Handout 1a + 1b + 1c Sign Language 2 AUSLAN VOCABULARY Lesson 1 - Family (continued…) 2015 The Deaf Society Updated: Version 2, August 2015 Handout 1a + 1b + 1c Sign Language 2 AUSLAN VOCABULARY Lesson 1 - Family (continued…) (Some photos were adapted from “Dictionary of Auslan Images” CD by Deaf Children Australia, 2004) 2015 The Deaf Society Updated: Version 2, August 2015 Handout 1a + 1b + 1c Sign Language 2 INSIGHTS INTO THE DEAF COMMUNITY Non-manual features of Auslan (From Johnston and Schembri, “Australian Sign Language: An introduction to sign language linguistics” p97) Table 4.7 Non-manual features. Body part Action Body part Action Head Shaking Mouth (cont.) Poking out the tongue Nodding Protruding the lips Turning to the left Rounding the lips Turning to the right Pressing the lips together Tilting to the left Drawing the lips back Tilting to the right Stretching the lips Tilting backwards Turning up the corners of the mouth Tilting forwards Turning down the corners of the mouth Moving backwards Pushing the tongue into the cheek Moving forwards Pushing the tongue down below the lower lip Moving side to side Biting the lip Eyebrows Raising Sucking in air Lowering Blowing out air Eyes Closing Cheeks Puffing out Opening Sucking in