Utilisation De Raspberry Dans Le Cadre Des Mini-Projets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Guía De Instalación De Debian GNU/Linux
Guía de instalación de Debian GNU/Linux 31 de julio de 2021 Guía de instalación de Debian GNU/Linux Copyright © 2004 – 2021 el equipo del instalador de Debian Este manual es software libre, puede redistribuirlo y/o modificarlo bajo los términos de la licencia general pública GNU. Por favor, consulte la licencia en el Apéndice F para más información. Versión de construcción de este manual: 20210730. Índice general 1. Bienvenido a Debian 1 1.1. ¿Qué es Debian? . 1 1.2. ¿Qué es GNU/Linux? . 1 1.3. ¿Qué es Debian GNU/Linux? . 2 1.4. ¿Qué es el instalador de Debian? . 3 1.5. Obtener Debian . 3 1.6. Obtener la última versión de este documento . 3 1.7. Estructura de este documento . 3 1.8. Sobre copyrights y licencias de software . 4 2. Requisitos del sistema 6 2.1. Hardware compatible . 6 2.1.1. Arquitecturas compatibles . 6 2.1.2. Tres puertos ARM diferentes . 7 2.1.3. Variaciones en los diseños de CPU ARM y en la complejidad del soporte . 7 2.1.4. Plataformas admitidas por Debian/armhf . 7 2.1.5. Plataformas que ya no admite Debian/armhf . 9 2.1.6. Múltiples procesadores . 9 2.1.7. Soporte de hardware gráfico . 9 2.1.8. Hardware de conectividad de red . 9 2.1.9. Periféricos y otro hardware . 10 2.2. Dispositivos que requieren firmware . 10 2.3. Adquisición de hardware específico para GNU/Linux . 10 2.3.1. Evite hardware cerrado o privativo . 10 2.4. Medios de instalación . 11 2.4.1. -

Cubox-I Pro Carrier Board for Imx6 Som (System-On-Module)
NXP-Freescale i.MX6 CuBox-i Pro Carrier Board for iMX6 SoM (System-On-Module) SolidRun Ltd. 3 Dolev st., 3rd floor, P.O. Box 75 Migdal Tefen 2495900, Israel. Simple. Robust. Computing Solutions www.solid-run.com CuBox-i Pro Data Sheet Overview At only 2”×2”×2” the CuBox-i is the tiniest computer in the world. Its elegant enclosure makes it ideal for mini-computing solutions, while its size is perfect for integrated solutions. Take advantage of the wide variety of features, interfaces and processor options, including onboard real-time clock, in selecting the solution that’s just right for you. CuBox-i Carrier Pro Highlighted Features: • Based on NXP’s iMX6 Single to Quad Core • Up to 4GB DDR3 • Small size 2”×2”×2” • Fanless, Robust and Industrial Design © SolidRun Ltd. 2016 3 Dolev St., 3rd floor, P.O. Box 75, Migdal Tefen 2495900, Israel / 2 CuBox-i Pro Data Sheet System Specifications System on Chip CuBox-i Pro HDMI 1080p with CEC USB 2.0 2 PWM LED Ethernet 5V DC Jack eSATA II Depends on MicroSOM model MicroUSB for development Micro SD interface RTC with backup battery Optical SPDIF audio out Infra-Red Remote Control Receiver Infra-Red Transmit (Remote Control) Tiny GPIO Button Passive Thermal Management High Polish Plastic Enclosure WiFi and BlueTooth Antenna Depends on MicroSOM model Power Management © SolidRun Ltd. 2016 3 Dolev St., 3rd floor, P.O. Box 75, Migdal Tefen 2495900, Israel / 3 CuBox-i Pro Data Sheet Interfaces Back View © SolidRun Ltd. 2016 3 Dolev St., 3rd floor, P.O. -

Full Circle Magazine #170 Contents ^ Full Circle Magazine Is Neither Affiliated With,1 Nor Endorsed By, Canonical Ltd
VIE Full Circle RE W THE INDEPENDENT MAGAZINE FOR THE UBUNTU LINUX COMMUNITY ISSUE #170 - June 2021 L U 4 B .0 UNTU 21 ) m o c . r VIE k E W c R i l F ( k e t i c w r : X o t U 4 o h B .0 P UNTU 21 TTAAMMEE YYOOUURR GGRRUUBB MMEENNUU GIVE YOUR BOOT MENU A MAKE OVER full circle magazine #170 contents ^ Full Circle Magazine is neither affiliated with,1 nor endorsed by, Canonical Ltd. HowTo Full Circle THE INDEPENDENT MAGAZINE FOR THE UBUNTU LINUX COMMUNITY Python p.15 Linux News p.04 Latex p.18 Command & Conquer p.13 ... p.XX Everyday Ubuntu p.31 Tame Your GRUB Menu p.20 Ubuntu Devices p.XX The Daily Waddle p.43 Micro This Micro That p.33 p.XX My Opinion p.40 Letters p.XX Review p.45 Inkscape p.26 Q&A p.52 Review p.48 Ubuntu Games p.55 Graphics The articles contained in this magazine are released under the Creative Commons Attribution-Share Alike 3.0 Unported license. This means you can adapt, copy, distribute and transmit the articles but only under the following conditions: you must attribute the work to the original author in some way (at least a name, email or URL) and to this magazine by name ('Full Circle Magazine') and the URL www.fullcirclemagazine.org (but not attribute the article(s) in any way that suggests that they endorse you or your use of the work). If you alter, transform, or build upon this work, you must distribute the resulting work under the same, similar or a compatible license. -
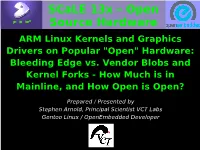
ARM Linux Kernels and Graphics Drivers on Popular "Open" Hardware: Bleeding Edge Vs
SCaLE 13x – Open Source Hardware ARM Linux Kernels and Graphics Drivers on Popular "Open" Hardware: Bleeding Edge vs. Vendor Blobs and Kernel Forks - How Much is in Mainline, and How Open is Open? Prepared / Presented by Stephen Arnold, Principal Scientist VCT Labs Gentoo Linux / OpenEmbedded Developer What is ARM/Embedded? · Small Single Board Computer (SBC) or System on Chip (SoC) · Very resource-constrained · Zaurus 5000-D – 32 MB RAM, StrongARM SA-1100 (DEC/ARM) · Kurobox HG – 128 MB RAM, 256 MB flash, no display (G3, no altivec) · Modern devices blurring the lines between “embedded” and desktop/server-class hardware · Multicore CPUs – 2/4/8 cores · Per-core FPUs - VFP3/VFP4, NEON · Multicore GPUs – 192-core Cuda on Tegra K1 · Accelerated HD video processing · USB3, 10/100/1000 Ethernet, SATA, HDMI ARM Devices and Graphics Hardware · ARMv7 HardFloat VFP/NEON · Wandboard / udoo / cubox-i - iMX.6 quad core, Vivante GPU · Beaglebone black / white - AM335X single core, OMAP3 / SGX GPU, PRUs · Sunxi MK802-II 1GB TV stick - Allwinner A10 single core, Mali GPU · Samsung Chromebook - Exynos5 dual core, Mali GPU · Acer Chromebook / Jetson TK1 – Tegra K1 quad-core, NVDIA Cuda GPU · Genesi SmartBook - Freescale iMX.5 single core, AMD z430 GPU ARM Graphics Hardware cont. · ARMv7 HardFloat VFP (no NEON) · Trimslice Diskless - NVIDIA Tegra 2 dual core CPU/GPU · ARMv6 HardFloat VFP (no NEON) · Raspberry Pi - Broadcom SoC single core, VideoCore IV GPU The State of ARM Graphics · (mostly) Current Vendor Blobs · Cubox-i4Pro (iMX.6) · RaspberryPi (VideoCore IV) · Allwinner (Mali) · ChromeOS K1 (Tegra124) · TI (OMAP/SGX) · Open Source Graphics · Tegra/Nouveau – opentegra/grate, nouveau w/firmware · Broadcom/VideoCore IV – weston/wayland, fbturbo · Mali – lima, fbturbo · OMAP – omapfb, omap3 · Vivante – etna-viv, fbturbo · Adreno – freedreno (2D/3D, xorg) Vendor Kernel Forks · Typically a single (older) kernel branch with lots of patches · Minimal backporting (maybe none) · Forwardporting to new branch can take a long time.. -
Hacking Raspberry Pi® Timothy L
HACKING RASPBERRY PI® TIMOTHY L. WARNER 800 East 96th Street, Indianapolis, Indiana 46240 USA ii HACKING RASPBERRY PI Hacking Raspberry Pi® Editor-in-Chief Greg Wiegand Copyright © 2014 by Que Publishing Executive Editor Rick Kughen All rights reserved. No part of this book shall be reproduced, stored in a retrieval system, or transmitted by any means, electronic, mechanical, Development Editor photocopying, recording, or otherwise, without written permission from Todd Brakke the publisher. No patent liability is assumed with respect to the use of the information contained herein. Although every precaution has been Managing Editor taken in the preparation of this book, the publisher and author assume Kristy Hart no responsibility for errors or omissions. Nor is any liability assumed for damages resulting from the use of the information contained herein. Project Editor ISBN-13: 978-0-7897-5156-0 Elaine Wiley ISBN-10: 0-7897-5156-9 Copy Editor Library of Congress Control Number: 2013944701 Chrissy White Printed in the United States of America Indexer First Printing: November 2013 Brad Herriman Proofreader Trademarks Kathy Ruiz All terms mentioned in this book that are known to be trademarks or service marks have been appropriately capitalized. Que Publishing cannot attest to Technical Editor the accuracy of this information. Use of a term in this book should not be Brian McLaughlin regarded as affecting the validity of any trademark or service mark. Editorial Assistant Kristen Watterson Warning and Disclaimer Every effort has been made to make this book as complete and as accurate Cover Designer as possible, but no warranty or fi tness is implied. -

Cubox Serial Interface Adapter Kit TECHNICAL DATA
CuBox serial interface adapter kit TECHNICAL DATA Radiometric Features: aerial thermography • optris PI LightWeight in combination with one of the smallest and lightest computer: CuBox • System weight only 325 g • Dedicated IR recording software for CuBox and 5 x I/O ports for remote control • Real-time radiometric onboard recordings to USB 3.0 fl ash drive (32 Hz / VGA or 125 Hz / VGA sub-frame mode) • Extensive analysis software PI Connect included • Cost-free fi eld updates of the CuBox software Specifi cations optris PI camera head Specifi cations CuBox i4Pro und i4x4 Measuring range –20 °C ... 900 °C Manufacturer Solid Run (www.solid-run.com) Spectral range 7.5 – 13 μm Operating temperature 0 ... 40 °C Accuracy ± 2 % or ± 2 °C Relative humidity 5 ... 90 %, non-condensing Thermal sensitivity (NETD) 40/ 80 mK (depending on camera model) Dimensions 50 x 50 x 50 mm Optics 13°... 90° HFOV Weight 115 g Resolution 640x480 px / 382x288 px Power supply 5 VDC/ 3A Dimensions 46 x 56 x 90 mm Power consumption 7.5 W Operating temperature 0...50/ 70 °C (PI 450) Processor i.MX6 Quad CPU (1 GHz) Operating system Linux Scope of supply Memory 16 GB Micro-SDHC card RAM 2 GB LPDDR3 @ i4Pro or 4 GB LPDDR3 @ i4x4 Ports 2 x USB 2.0 1x micro USB for adapter cable 1x RJ45 Ethernet (Gigabit Ethernet) 1x eSata 1x HDMI 1x micro SD PI LightWeight camera with CuBox and CuBox serial interface adapter kit serial interface adapter kit Scope of supply: • Adapter cable with 5x I/O ports (can be confi gured as a digital input, digital output or input for a PWM signal) • Micro SDHC card (16 GB) with ready tu use Linus image • USB 3.0 stick (128 GB) with ready to use confi guration fi le • Power cable for CuBox (with open ends) Optris GmbH · Ferdinand-Buisson-Str. -

Volumio Download Pc Audio Sources
volumio download pc Audio Sources. NAS drive shares (CIFS & NFS) are easily mounted and scanned by Volumio for audio content. You can add USB hard drives, USB sticks, and use the free space on your SD card for extra or mobile storage. There are lots of built-in internet web radio streams available, and you can also add your own. Spotify and Youtube are available as plugins. Streaming from mobile devices is provided out-of-the-box by Airplay & UPnP/DLNA. How do I add a NAS drive share? Navigate to 'Settings' ("cog" icon at the top right), 'My Music' and click on 'Add new drive.' Volumio will attempt to automatically find any music shares, and settings can be added manually if this is not successful. You will need to choose a name for the share, and decide between CIFS (default) or NFS protocols (see your NAS GUI for more information). If entering details manually, you will also need to know the IP address of the NAS, and the path to the share (again see NAS GUI). Credentials for the connection can be added in the advanced options. If using a domain account add the domain to the 'options' field in the format dom=domainname , e.g. dom=CONTOSO.local , and just enter the username in the username field. Please ensure that the permissions on the NAS files are set correctly for CIFS in order for Volumio to be able to access them. In the case of NFS, file permissions are not so important, BUT you must allow access to the NAS from the IP address of your Volumio device (set in NAS GUI). -
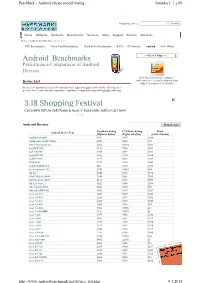
Androidtm Benchmarks 3.18 Shopping Festival
PassMark - Android phone model listing Stránka č. 1 z 69 Shopping cart | Search Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device List CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone TM ----Select A Page ---- Android Benchmarks Performance Comparison of Android Devices How does your device compare? Device List Add your device to our benchmark chart with PerformanceTest Mobile ! Below is an alphabetical list of all Android device types that appear in the charts. Clicking on a specific device name will take you to the charts where it appears in and will highlight it for you. 3.18 Shopping Festival Up to 50% Off On Cell Phone & Acce. 3-Days Only, Add to Cart now! Android Devices Find Device PassMark Rating CPUMark Rating Rank Android Device Type (higher is better) (higher is better) (lower is better) 1005tg N10-QM 935 3377 4086 1080p-n003 1080P-N003 2505 9820 874 1life 1Life.smart.air 2282 10103 1243 3-q RC9731C 2154 5756 1487 3q LC0720C 1646 4897 2531 3q QS0717D 1363 1760 3236 3q RC9712C 2154 5223 1485 9300 9300 1275 3364 3443 A-link PAD10 ICS 616 1130 4389 A.c.ryan dyno 7.85 2749 11065 634 A2 A2 1240 2784 3518 A800 XOLO_A800 1344 3661 3285 A830 Lenovo A830 2114 8313 1559 Ab-s_a Aqua_7 1522 3640 2834 Abc Vision7-DCI 2602 6880 753 Abroad ABROAD 1438 3379 3057 Acer A1-713 2229 9069 1349 Acer A1-810 2265 8337 1282 Acer A1-811 2233 8524 1343 Acer A1-830 3005 9196 540 Acer A1-840 3962 23996 281 Acer A1-840FHD 5124 28591 61 Acer A101 1577 3758 2702 Acer A110 1964 8623 1917 Acer A200 1557 3829 2746 Acer A210 2135 8313 1516 Acer A211 1848 8130 2137 Acer A3-A10 2351 8128 1100 Acer A3-A20FHD 3269 11265 456 Acer AA3-600 5451 22392 25 Acer AO722 2603 5185 751 Acer B1-710 1339 3900 3297 Acer B1-711 2293 8583 1220 Acer b1-720 2058 4371 1701 Acer B1-730HD 3068 9045 516 Acer B1-A71 1308 4119 3362 http://www.androidbenchmark.net/device_list.php 9.3.2015 PassMark - Android phone model listing Stránka č. -

Sri Shanmugh Engineering an Pullipalayam,M
Sri Shanmugha College of Engineering and Technology Pullipalayam,Morur(Po),Sankari(Tk),Salem(Dt) OUR SINCERE THANKS TO MANAGEMENT OF SSCET CHAIRMAN: Mr.K.SHANMUGHAM ENIGCS-2K15 OUR ASSOCIATION MEMBERS HEAD OF THE DEPARTMENT Mr.R.SRIVEL TEACHING STAFFS Ms.P.DHIVYA(AP\ECE) Ms.R.B.DRAVIDAPRIYAA(AP\ECE) Mr.S.DURAIRAJ(AP\ECE) Mr.P.PRAGADEES KUMAR(AP\ECE) Ms.S.MOHANAPRIYA(AP\ECE) Mr.A.SIVANANTHAM(AP\ECE) NON TEACHING STAFFS Ms.C.E.THENMOZHI(AP\ECE) Mr.E.KUPPURAJU(AP\ECE) Mr.S.PRAVEENKUMAR(AP\ECE) Mr.S.MOHAN(AP\ECE) PRESIDENT VICE-PRESIDENT Mr.P.S.GOBINATH,IV-ECE Mr.M.HARIHARAN,III-ECE SECRETARY JOINT-SECRETARY Ms.M.SEETHA,IV-ECE Mr.L.VIGNESH,III-ECE TREASURER JOINT-TREASURER Ms.R.UTHRA,IV-ECE Ms.V.KANNAPRIYA,III-ECE COMMITTEE MEMBERS TECHNICAL COMMITTEE HOSPITALITY COMMITTEE Mr.D.SATHEESH,IV-ECE Mr.N.MURUGESAN,IV-ECE Ms.S.SWATHI,IV-ECE Ms.S.MAHALAKSHMI,IV-ECE Ms.V.SUJITHRA,IV-ECE Ms.D.UMA,IV-ECE Mr.UDHAYAKUMAR SEMMALAI,III-ECE Mr.A.KARTHI,III-ECE Mr.B.MATHIYAZAGAN,III-ECE Mr.T.GOKUL,III-ECE Ms.S.MYTHILI,III-ECE RECEPTION COMMITTEE MOC Ms.R.GUGHAPRIYA,IV-ECE Ms.S.NANDHUPRIYA,IV-ECE Ms.P.SARANYA,IV-ECE Ms.V.SARANYA,III-ECE Ms.R.MOUNIKA,IV-ECE Ms.R.SUPRIYA,III-ECE Ms.K.SRI YESHVANTHRA,III-ECE Ms.K.NITHYA,III-ECE Ms.R.SWAATHY,III-ECE REGISTRATION COMMITTEE REFRESHMENT COMMITTEE Mr.K.S.MANJUNATH,IV-ECE Mr.P.LOKESHVIVEKANANDAN,IV-ECE Mr.D.KIRUBASHANKAR,IV-ECE Mr.P.NANDHAKUMAR,IV-ECE Ms.S.S.PREETHI,IV-ECE Mr.C.KISHOREKUMAR,III-ECE Ms.S.ANU,IV-ECE Mr.P.KARTHI,III-ECE Mr.V.KARTHI,III-ECE DESIGN COMMITTEE Ms.V.DIVYA,III-ECE Mr.S.DINESHKUMAR,IV-ECE PURCHASING -

Linux Journal | July 2017 | Issue
™ Patch Managment Best Practices A Guide to Using Plex in Your Home Network JULY 2017 | ISSUE 279 Since 1994: The Original Magazine of the Linux Community http://www.linuxjournal.com BUILD YOUR OWN CLUSTER EOF: Linux for Everyone— All 7.5 Billion of Us PLUS: WATCH: Learn Golang ISSUE OVERVIEW and Back Up V GitHub Repositories LJ279-July2017.indd 1 6/21/17 4:31 PM NEW! Managing Harnessing Container the Power Security and of the Cloud Practical books Compliance with SUSE in Docker Author: Author: Petros Koutoupis for the most technical Petros Koutoupis Sponsor: Sponsor: SUSE people on the planet. Twistlock DevOps for An the Rest of Us Architect’s Author: Guide: John S. Tonello Linux for GEEK GUIDES Sponsor: Enterprise IT Puppet Author: Sol Lederman Sponsor: SUSE Memory: Past, Cloud-Scale Present and Automation Future—and with Puppet the Tools to Author: Optimize It John S. Tonello Author: Sponsor: Petros Koutoupis Puppet Sponsor: Intel Download books for free with a Why Innovative Tame the simple one-time registration. App Developers Docker Life Love High-Speed Cycle with http://geekguide.linuxjournal.com OSDBMS SUSE Author: Author: Ted Schmidt John S. Tonello Sponsor: Sponsor: IBM SUSE LJ279-July2017.indd 2 6/21/17 4:31 PM NEW! Managing Harnessing Container the Power Security and of the Cloud Practical books Compliance with SUSE in Docker Author: Author: Petros Koutoupis for the most technical Petros Koutoupis Sponsor: Sponsor: SUSE people on the planet. Twistlock DevOps for An the Rest of Us Architect’s Author: Guide: John S. Tonello Linux for GEEK GUIDES Sponsor: Enterprise IT Puppet Author: Sol Lederman Sponsor: SUSE Memory: Past, Cloud-Scale Present and Automation Future—and with Puppet the Tools to Author: Optimize It John S. -

F28HS Hardware-Software Interface
Outline F28HS Hardware-Software Interface: 1 Lecture 1: Introduction to Systems Programming Systems Programming 2 Lecture 2: Systems Programming with the Raspberry Pi 3 Hans-Wolfgang Loidl Lecture 3: Memory Hierarchy Memory Hierarchy Principles of Caches School of Mathematical and Computer Sciences, 4 Heriot-Watt University, Edinburgh Lecture 4: Programming external devices Basics of device-level programming 5 Lecture 5: Exceptional Control Flow 6 Lecture 6: Computer Architecture Processor Architectures Overview Pipelining 7 Lecture 7: Code Security: Buffer Overflow Attacks Semester 2 — 2019/20 8 Lecture 8: Interrupt Handling 9 Lecture 9: Miscellaneous Topics 10 0No proprietary software has been used in producing these slides Lecture 10: Revision Hans-Wolfgang Loidl (Heriot-Watt Univ) F28HS Hardware-Software Interface 2019/20 1 / 33 Hans-Wolfgang Loidl (Heriot-Watt Univ) F28HS Hardware-Software Interface 2019/20 2 / 33 SoC: System-on-Chip A System-on-Chip (SoC) integrates all components of a Lecture 2. computer or other electronic system into a single chip. One of the main advantages of SoCs is their low power Systems Programming with consumption. Therefore they are often used in embedded devices. the Raspberry Pi All versions of the Raspberry Pi are examples of SoCs Note: In this course we are using the Raspberry Pi 2 Model B. The low-level code will only work with this version. The Raspberry Pi Foundation: https://www.raspberrypi.org/ UK registered charity 1129409 Hans-Wolfgang Loidl (Heriot-Watt Univ) F28HS Hardware-Software Interface Lec 2: Sys Prg on RPi 3 / 33 Hans-Wolfgang Loidl (Heriot-Watt Univ) F28HS Hardware-Software Interface Lec 2: Sys Prg on RPi 4 / 33 Raspberry Pi 1 vs 2 Raspberry Pi 2 The Raspberry Pi version 2 was released on 2nd February 2015. -

Ubuntu Installation Guide
Ubuntu Installation Guide Ubuntu Installation Guide Copyright © 2004 – 2015 the Debian Installer team Copyright © 2004, 2005, 2006, 2007, 2008, 2009, 2010, 2015 Canonical Ltd. This document contains installation instructions for the Ubuntu 16.04 system (codename “‘Xenial Xerus’”), for the 32-bit hard-float ARMv7 (“armhf”) architecture. It also contains pointers to more information and information on how to make the most of your new Ubuntu system. This manual is free software; you may redistribute it and/or modify it under the terms of the GNU General Public License. Please refer to the license in Appendix F. Table of Contents Installing Ubuntu 16.04 “Xenial Xerus” For armhf.......................................................................ix 1. Welcome to Ubuntu ........................................................................................................................1 1.1. What is Ubuntu?...................................................................................................................1 1.1.1. Sponsorship by Canonical .......................................................................................1 1.2. What is Debian? ...................................................................................................................1 1.2.1. Ubuntu and Debian..................................................................................................2 1.2.1.1. Package selection........................................................................................2 1.2.1.2. Releases.......................................................................................................3