F28HS Hardware-Software Interface
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Setting up Odroid C2 – Throughtput Testing
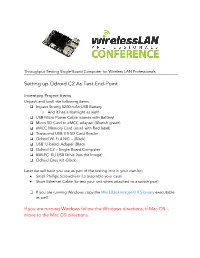
Throughput Testing Single-Board Computer for Wireless LAN Professionals Setting up Odroid C2 As Test End-Point Inventory Project Items Unpack and knoll the following items ❑ Impact Strong 5200 mAh USB Battery o And it has a flashlight as well! ❑ USB Micro Power Cable (comes with Battery) ❑ Micro SD Card to eMCC adapter (Blueish green) ❑ eMCC Memory Card (small with Red label) ❑ Transcend USB 3.0 SD Card Reader ❑ Odroid Wi-Fi 4 NIC – (Black) ❑ USB ‘U-bend’ Adaper (Black ❑ Odroid C2 – Single Board Computer ❑ #WLPC_EU USB Drive (has the Image) ❑ Odroid Case Kit (Black) Later we will have you use as part of the testing (not in your own kit) • Small Phillips Screwdriver (to assemble your case) • Short Ethernet Cable (to test your unit when attached to a switch port) ❑ If you are running Windows copy the Win32DiskImager-0.9.5-binary executable as well. If you are running Windows follow the Windows directions, if Mac OS – move to the Mac OS directions. Mac OS Version Configure Image ❑ Copy Image File from the #WLPC_EU USB drive (in the Odroid for #WLPC_EU folder) to your Desktop… the file name is DietPi_v133_OdroidC2-arm64- (WLAN_PRO) ❑ Open Image File – Boot Drive ❑ Should have a Folder Call “Boot” ❑ Find the dietpi.txt We are changing setting so your Odroid device can join a local SSID and download more files we’ll need. ❑ Under the Wi-Fi Details section change the Wi-Fi SSID to WLPC_EU-01 with a PSK of password. #Enter your Wifi details below, if applicable (Case Sensitive). Wifi_SSID=WLPC_EU-01 Wifi_KEY=password ❑ Under WiFi Hotspot Settings, -
Improving the Beaglebone Board with Embedded Ubuntu, Enhanced GPMC Driver and Python for Communication and Graphical Prototypes
Final Master Thesis Improving the BeagleBone board with embedded Ubuntu, enhanced GPMC driver and Python for communication and graphical prototypes By RUBÉN GONZÁLEZ MUÑOZ Directed by MANUEL M. DOMINGUEZ PUMAR FINAL MASTER THESIS 30 ECTS, JULY 2015, ELECTRICAL AND ELECTRONICS ENGINEERING Abstract Abstract BeagleBone is a low price, small size Linux embedded microcomputer with a full set of I/O pins and processing power for real-time applications, also expandable with cape pluggable boards. The current work has been focused on improving the performance of this board. In this case, the BeagleBone comes with a pre-installed Angstrom OS and with a cape board using a particular software “overlay” and applications. Due to a lack of support, this pre-installed OS has been replaced by Ubuntu. As a consequence, the cape software and applications need to be adapted. Another necessity that emerges from the stated changes is to improve the communications through a GPMC interface. The depicted driver has been built for the new system as well as synchronous variants, also developed and tested. Finally, a set of applications in Python using the cape functionalities has been developed. Some extra graphical features have been included as example. Contents Contents Abstract ..................................................................................................................................................................................... 5 List of figures ......................................................................................................................................................................... -

User Manual - S.USV Solutions Compatible with Raspberry Pi, up Board and Tinker Board Revision 2.2 | Date 07.06.2018
User Manual - S.USV solutions Compatible with Raspberry Pi, UP Board and Tinker Board Revision 2.2 | Date 07.06.2018 User Manual - S.USV solutions / Revision 2.0 Table of Contents 1 Functions .............................................................................................................................................. 3 2 Technical Specification ........................................................................................................................ 4 2.1 Overview ....................................................................................................................................... 5 2.2 Performance .................................................................................................................................. 6 2.3 Lighting Indicators ......................................................................................................................... 6 3 Installation Guide................................................................................................................................. 7 3.1 Hardware ...................................................................................................................................... 7 3.1.1 Commissioning S.USV ............................................................................................................ 7 3.1.2 Connecting the battery .......................................................................................................... 8 3.1.3 Connecting the external power supply ................................................................................. -
Building a Distribution: Openharmony and Openmandriva
Two different approaches to building a distribution: OpenHarmony and OpenMandriva Bernhard "bero" Rosenkränzer <[email protected]> FOSDEM 2021 -- February 6, 2021 1 MY CONTACT: [email protected], [email protected] Way more important than that, he also feeds LINKEDIN: dogs. https://www.linkedin.com/in/berolinux/ Bernhard "bero" Rosenkränzer I don't usually do "About Me", but since it may be relevant to the topic: Principal Technologist at Open Source Technology Center since November 2020 President of the OpenMandriva Association, Contributor since 2012 - also a contributor to Mandrake back in 1998/1999 2 What is OpenHarmony? ● More than an operating system: Can use multiple different kernels (Linux, Zephyr, ...) ● Key goal: autonomous, cooperative devices -- multiple devices form a distributed virtual bus and can share resources ● Initial target devices: Avenger 96 (32-bit ARMv7 Cortex-A7+-M4), Nitrogen 96 (Cortex-M4) ● Built with OpenEmbedded/Yocto - one command builds the entire OS ● Fully open, developed as an Open Source project instead of an inhouse product from the start. ● For more information, visit Stefan Schmidt's talk in the Embedded devroom, 17.30 and/or talk to us at the Huawei OSTC stand. 3 What is OpenMandriva? ● A more traditional Linux distribution - controlled by the community, continuing where Mandriva left off after the company behind it went out of business in 2012. Its roots go back to the first Mandrake Linux release in 1998. ● Originally targeting only x86 PCs - Support for additional architectures (aarch64, armv7hnl, RISC-V) added later ● Repositiories contain 17618 packages, built and updated individually, assembled into an installable product with omdv-build-iso or os-image-builder. -

Suzanne's Microcluster Slides
csinparallel.org Microclusters for teaching PDC Suzanne J. Matthews (West Point) 1 csinparallel.org What is a Microcluster? • A personal, highly portable Beowulf cluster • Enables highly interactive and tactile experiential learning • Notable early examples: – Ultimate Linux Lunch Box (Ron Minnich and Mitch Williams, Sandia National Labs) – LittleFe (Charlie Peck, Earlham College) – Microwulf (Joel Adams, Calvin College) 2 csinparallel.org Single Board Computers (SBCs) 3 csinparallel.org Student Pi (West Point) Suzanne J. Matthews Raspberry Pi nodes - Prototype: Raspberry Pi B nodes - Initial: Raspberry Pi B+ nodes - Current: Raspberry Pi 2 nodes - 900 Mhz quad-core CPU, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Raspbian Linux June 2014 - ~$40 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html October 2014 May 2016 4 csinparallel.org Student Parallella (West Point) Suzanne J. Matthews Parallella nodes - dual-core ARM A9 CPU, 16-core Epiphany co-processor, 1 GB of RAM, μHDMI, μUSB, Gigabit Ethernet - Linaro Linux - ~$145 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html - http://suzannejmatthews.github.io/ October 2014 April 2016 January 2015 5 csinparallel.org Half ShoeBox Clusters (Centre College) David Toth Cubieboard/ODROID nodes (2-node clusters) - Prototype: Cubieboard2: dual-core ARM Cortex A7, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Latest: ODROID C2: 2Ghz quad-core A53, 2 GB of RAM, HDMI, USB, Gigabit Ethernet, - Android/Ubuntu Linux - ~ $150-$200 p/cluster - Materials: Early 2014 - http://web.centre.edu/david.toth/portablecluster/index.html -

Passmark - Android Device List
PassMark - Android Device List https://www.androidbenchmark.net/device_list.php AndroidTM Benchmarks Performance Comparison of Android Devices Below is an alphabetical list of all Android device types that appear in the charts. Clicking on a specific device name will take you to the charts where it appears in and will highlight it for you. PassMark Rating CPUMark Rating PassMark Rank Android Device Type Samples (higher is better) (higher is better) (lower is better) 4G R17S 1,572 4,088 1253 1 A-gold BV9500Plus 5,052 13,068 375 1 A-gold BV9800 4,450 11,400 487 1 A-gold F1 4,237 10,869 531 7 A-gold S3_Pro 4,392 11,219 504 2 A-gold Z2_PRO 4,406 11,246 499 1 A1 Alpha 20+ 4,753 12,266 435 1 Acer A3-A40 1,982 5,269 1082 1 Acer AO722 519 1,272 1725 1 1 z 62 2020-10-14, 12:02 PassMark - Android Device List https://www.androidbenchmark.net/device_list.php PassMark Rating CPUMark Rating PassMark Rank Android Device Type Samples (higher is better) (higher is better) (lower is better) AGM A10 2,030 8,521 1066 1 ALCATEL A574BL 497 1,202 1736 1 AlcatelOneTouch Alcatel_5044R 438 1,129 1759 1 Alco CT9223W97 1,214 3,111 1384 1 ALLDOCUBE M8 2,730 7,274 882 5 ALLDOCUBE T701 1,092 4,554 1437 1 ALLDOCUBE U1006H 1,902 4,931 1125 1 ALLVIEW P7_PRO 1,691 4,543 1210 1 ALLVIEW X4_Soul 2,536 6,938 925 1 Alps Acer One 8 T4-82L 2,539 6,526 924 1 Alps Tablet18T 1,201 3,043 1394 1 Alps tb8788p1_64_bsp 2,343 5,784 983 2 Amazon KFKAWI 712 1,701 1589 4 Amazon KFMAWI 2,306 5,640 992 19 Amazon KFONWI 1,082 2,588 1442 3 Amlogic A95X-A3 1,228 3,182 1381 1 Amlogic ABOX A4 397 -

A Low-Cost Deep Neural Network-Based Autonomous Car
DeepPicar: A Low-cost Deep Neural Network-based Autonomous Car Michael G. Bechtely, Elise McEllhineyy, Minje Kim?, Heechul Yuny y University of Kansas, USA. fmbechtel, elisemmc, [email protected] ? Indiana University, USA. [email protected] Abstract—We present DeepPicar, a low-cost deep neural net- task may be directly linked to the safety of the vehicle. This work based autonomous car platform. DeepPicar is a small scale requires a high computing capacity as well as the means to replication of a real self-driving car called DAVE-2 by NVIDIA. guaranteeing the timings. On the other hand, the computing DAVE-2 uses a deep convolutional neural network (CNN), which takes images from a front-facing camera as input and produces hardware platform must also satisfy cost, size, weight, and car steering angles as output. DeepPicar uses the same net- power constraints, which require a highly efficient computing work architecture—9 layers, 27 million connections and 250K platform. These two conflicting requirements complicate the parameters—and can drive itself in real-time using a web camera platform selection process as observed in [25]. and a Raspberry Pi 3 quad-core platform. Using DeepPicar, we To understand what kind of computing hardware is needed analyze the Pi 3’s computing capabilities to support end-to-end deep learning based real-time control of autonomous vehicles. for AI workloads, we need a testbed and realistic workloads. We also systematically compare other contemporary embedded While using a real car-based testbed would be most ideal, it computing platforms using the DeepPicar’s CNN-based real-time is not only highly expensive, but also poses serious safety control workload. -

Security Monitor for Mobile Devices: Design and Applications
UNIVERSITY OF CALIFORNIA, IRVINE Security Monitor for Mobile Devices: Design and Applications DISSERTATION submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in Computer Science by Saeed Mirzamohammadi Dissertation Committee: Professor Ardalan Amiri Sani, UCI, Chair Professor Gene Tsudik, UCI Professor Sharad Mehrotra, UCI Doctor Sharad Agarwal, MSR 2020 Portion of Chapter 1 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 1 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 1 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 1 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 2 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 2 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 3 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 4 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 5 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 6 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 7 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 7 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 7 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 7 c 2018 ACM, reprinted, with permission, from [148] All other materials c 2020 Saeed Mirzamohammadi TABLE OF CONTENTS Page LIST OF FIGURES v LIST OF TABLES vii ACKNOWLEDGMENTS viii VITA ix ABSTRACT OF THE DISSERTATION xi 1 Introduction 1 1.1 Applications of the security monitor . -

D I E B Ü C H S E D E R P a N D O R a Seite 1
D i e B ü c h s e d e r P a n d o r a Infos zur griechischen Mythologie siehe: http://de.wikipedia.org/wiki/B%C3%BCchse_der_Pandora ______________________________________________________________________________________________________________________________________________________ „Das Öffnen der Büchse ist absolute Pflicht, um die Hoffnung in die Welt zu lassen!“ Nachdruck und/oder Vervielfältigungen, dieser Dokumentation ist ausdrücklich gestattet. Quellenangabe: Der Tux mit dem Notebook stammt von der Webseite: http://www.openclipart.org/detail/60343 1. Auflage , © 9-2012 by Dieter Broichhagen | Humboldtstraße 106 | 51145 Köln. e-Mail: [email protected] | Web: http://www.broichhagen.de | http://www.illugen-collasionen.com Satz, Layout, Abbildungen (wenn nichts anderes angegeben ist): Dieter Broichhagen Alle Rechte dieser Beschreibung liegen beim Autor Gesamtherstellung: Dieter Broichhagen Irrtum und Änderungen vorbehalten! Seite 1 - 12 D i e B ü c h s e d e r P a n d o r a Infos zur griechischen Mythologie siehe: http://de.wikipedia.org/wiki/B%C3%BCchse_der_Pandora ______________________________________________________________________________________________________________________________________________________ Hinweis: Weitere Abbildungen von meiner „Büchse der Pandora“ finden Sie unter http://broichhagen.bplaced.net/ilco3/images/Pandora-X1.pdf Bezeichnungen • SheevaPlug ist kein Katzenfutter und kein Ausschlag • DreamPlug ist kein Auslöser für Alpträume • Raspberry Pi ist kein Himbeer-Kuchen • Pandaboard ist kein Servbrett für Pandabären • Die „Büchse der Pandora“ ist keine Legende Was haben SheevaPlug, DreamPlug, Raspberry Pi und Pandaboard gemeinsam? Sie haben einen ARM und sind allesamt Minicomputer. Wer einen ARM hat, ist nicht arm dran. Spaß bei Seite oder vielmehr, jetzt geht der Spaß erst richtig los. Am Anfang war der ... SheevaPlug Das Interesse wurde durch Matthias Fröhlich geweckt, der einen SheevaPlug- Minicomputer vor 2 Jahren im Linux- Workshop vorstellte. -
End-To-End Learning for Autonomous Driving Robots
End-to-End Learning for Autonomous Driving Robots Anthony Ryan 21713293 Supervisor: Professor Thomas Bräunl GENG5511/GENG5512 Engineering Research Project Submitted: 25th May 2020 Word Count: 8078 Faculty of Engineering and Mathematical Sciences School of Electrical, Electronic and Computer Engineering 1 Abstract This thesis presents the development of a high-speed, low cost, end-to-end deep learning based autonomous robot driving system called ModelCar-2. This project builds on a previous project undertaken at the University of Western Australia called ModelCar, where a robotics driving system was first developed with a single LIDAR scanner as its only sensory input as a baseline for future research into autonomous vehicle capabilities with lower cost sensors. ModelCar-2 is comprised of a Traxxas Stampede RC Car, Wide-Angle Camera, Raspberry Pi 4 running UWA’s RoBIOS software and a Hokuyo URG-04LX LIDAR Scanner. ModelCar-2 aims to demonstrate how the cost of producing autonomous driving robots can be reduced by replacing expensive sensors such as LIDAR with digital cameras and combining them with end-to-end deep learning methods and Convolutional Neural Networks to achieve the same level of autonomy and performance. ModelCar-2 is a small-scale application of PilotNet, developed by NVIDIA and used in the DAVE-2 system. ModelCar-2 uses TensorFlow and Keras to recreate the same neural network architecture as PilotNet which features 9 layers, 27,000,000 connections and 252,230 parameters. The Convolutional Neural Network was trained to map the raw pixels from images taken with a single inexpensive front-facing camera to predict the speed and steering angle commands to control the servo and drive the robot. -

List of Projects Using Raspberry Pi with Advance View: 1
List of Projects using Raspberry Pi with advance view: 1. Home/Hotel Monitoring System with Automated controls A cloud connected prototype to monitor and control any hotel or can be home, The system is connected to an android application. Story Everyday we see a changing trend in technology and no matter wh has changed the way we live today and…... Listed under: Metering - Instrument Projects, Sensor - Transducer - Detector Projects 2. JQR Quadruped Autonomous Robot With a lot of inspiration from Boston Dynamics projects, I'm trying to make something great w million dollars. Story JQR Quadruped Robot is a DIY project with the main objective to build an autonomous, legged robot that wi people in many activities. The project…... Listed under: Robotics - Automation Projects 3. Raspberry Pi Web-Controlled Robot with Video Simple Raspberry Pi web-controlled robot with video live streaming. Story gatoBo gato is the spanish translation for cat. A web controlled Raspberry Pi Zero W Robot with live video streaming. This is something I b order to bother my cats. About Raspberry Pi Wikipedia: The Raspberry Pi is a…... Listed under: Robotics - Automation Projects 4. Alexa Messenger for Whatsapp Text anyone at anytime without even holding your phone or type a single letter with Alexa Messen Story Alexa Messenger for Whatsapp Did you ever want to text your friend but you are always busy or just not comfortable wit phone small screen…... Listed under: Other Projects 5. Archimedes: The AI Robot Owl A wearable robotic owl familiar. Archimedes judges your emotions, via Google AIY. Story As feature in Make: Magazine! This is a robotic owl that looks around for cool people, and can tell whether you're happy or upset. -

SOM IB3710 Quad Core SOM (System-On-Module) Rev 1.3
Intel Braswell SOM IB3710 Quad Core SOM (System-On-Module) Rev 1.3 SolidRun Ltd. 7 Hamada st., Yokne’am Illit, 2495900, Israel Simple. Robust. Computing Solutions www.solid-run.com 1 | Page Document revision 1.0 28082017 SolidRun Ltd. 2017 Overview Embedded system developers, device makers and OEMs: Shorten your development cycle and accelerate time-to-market with our Micro-System on a Module – SolidRun’s SOM family. We’ve harnessed Intel’s powerful new Braswell line of 14 nm SoCs, producing a powerful, small form- factor module that is ideally suited for a wide range of Windows- and Linux-based IoT applications. SOM IB3710 Highlighted Features Based on Intel’s Braswell SoC Up to 8GB Memory Size Small size 53mmx40mm Long longevity of 7 years 4K support Optimized onboard power management Dramatically reduces complexity 2 | Page Document revision 1.0 28082017 SolidRun Ltd. 2017 System Specifications Pentium N3710 Processor cores 4 Memory (RAM) Up to 8GB (4GB default size) CPU HFM Clock (GHz) 1.60, Burst 2.56 Graphic GPU Intel Gen8 LP – 16EU GPU HFM Clock (MHz) 400, Turbo Clock 700 Max Resolution (DP 1.1a, HDMI 1.4b) 3840×2160 @30 Hz, 2560×1600 @60; 24 bpp eDP 1.4 Max 2560×1600 @60; 24bpp Junction temp. range 0C-90C Dimensions 52.8mm x 40mm Max. height from carrier 6.1mm to 8.6mm (depending on DF40 1.5-4.0 mm mating height on carrier board) Mechanical fastening 3 x M1.8 mechanical holes DDR-3L Onboard one channel (1GByte version) and dual channel (all other) DDR3L 1600Mbps , up to 8GByte total Network Onboard 10/100/1000 Mbps (RTL8111G)