Spacecraft Description
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

MARS an Overview of the 1985–2006 Mars Orbiter Camera Science
MARS MARS INFORMATICS The International Journal of Mars Science and Exploration Open Access Journals Science An overview of the 1985–2006 Mars Orbiter Camera science investigation Michael C. Malin1, Kenneth S. Edgett1, Bruce A. Cantor1, Michael A. Caplinger1, G. Edward Danielson2, Elsa H. Jensen1, Michael A. Ravine1, Jennifer L. Sandoval1, and Kimberley D. Supulver1 1Malin Space Science Systems, P.O. Box 910148, San Diego, CA, 92191-0148, USA; 2Deceased, 10 December 2005 Citation: Mars 5, 1-60, 2010; doi:10.1555/mars.2010.0001 History: Submitted: August 5, 2009; Reviewed: October 18, 2009; Accepted: November 15, 2009; Published: January 6, 2010 Editor: Jeffrey B. Plescia, Applied Physics Laboratory, Johns Hopkins University Reviewers: Jeffrey B. Plescia, Applied Physics Laboratory, Johns Hopkins University; R. Aileen Yingst, University of Wisconsin Green Bay Open Access: Copyright 2010 Malin Space Science Systems. This is an open-access paper distributed under the terms of a Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract Background: NASA selected the Mars Orbiter Camera (MOC) investigation in 1986 for the Mars Observer mission. The MOC consisted of three elements which shared a common package: a narrow angle camera designed to obtain images with a spatial resolution as high as 1.4 m per pixel from orbit, and two wide angle cameras (one with a red filter, the other blue) for daily global imaging to observe meteorological events, geodesy, and provide context for the narrow angle images. Following the loss of Mars Observer in August 1993, a second MOC was built from flight spare hardware and launched aboard Mars Global Surveyor (MGS) in November 1996. -

Gulick, V CV2008.PDF
Curriculum Vitae: Dr. Virginia C. Gulick Nr\SA Amcs RcsearchCenter, lVfail Stop 239-20,Moffetl Field, Califoniia94035 (650) 604-0781 (office), Vireinia.C.GuUckr7lnase-gav IIDUCATION PhD (Geosciences);University of Arizona Ph.D. Thesis: Magnmtic Intrusiorts ancl l{ydrotlrcrmal Systents:Implicatiotts for the Fornmtion of Small Msrtian Valleys MS. (Geosciencr:s),Minor in Hydrology,The University of Arizona,Tucson Master Thesis: Origin ad Ev'olutionoJ'I'alle1's on the Martian Volcanoes:T'he Hatvaiittn.4nalog. B.A. (Geoscicnces),Rutgers University (Rutgers College) New Brunswick, New Jersey Senior Thesis:TIte Coral SeaSedinettt Study. I'[t.ft]SENTPOStrTION 1996-prres.:ResearchScientist (SETI InstitutePrincipal Investigator)& Adjunct Professor,Astronomy Dept.,NM StateUniv. u Mars ScienceLab 2009landing site selcction steering group nrembcr. r MRO'05 IIiRISE instrumentsciencc ternr nrcnibcr(200)-2009): Lead on flrn,ial & hydrothernral processes, E/PO & r'r,eb technologies. I-IiRl:iE E/PO website (http://nrarsox,eb.nas.uasa. gov/I{iRISE) presentation Planctary l)ata in E,ducational ' Invited to AGU's Scssion Using Settings. Presentationtitle: "MRO's High Re.solutionImaging ScienceExperirncnt ([iiRISE): EdLrcation And PubiicOutr each Plans",. r Invitedpanelist fot NASA's Leamingfiom the Frontier:Getting Planetary l)ata into the Herndsof EducatorsWorkshop at LPi, March 14,2004. ' Co-convcuerof thc Volcano/iceInteraction on Earthand Mars Conf-.,P.eykjavik, Iceland, August 2000. " Projectscicnce lead on Marsorveb:the Mars l,anding Site Studies& Global Visualizationweb cnvironmentr:ffort (hItpJ4UDSIylb.nas.liUagq1llandinqsites).1998-present. o ScienceCoI for the Clickworkersl'roject; NASA's Experimeutin distributeddata analysis by the p ubl i c w eb si tc (liltd&lekfi g*9t$.3l9.qag4.gev ) 20 0 0-p resent. -
2001 Mars Odyssey 1/24 Scale Model Assembly Instructions
2001 Mars Odyssey 1/24 Scale Model Assembly Instructions This scale model of the 2001 Mars Odyssey spacecraft is designed for anyone interested, although it might be inappropriate for children younger than about ten years of age. Children should have adult supervision to assemble the model. Copyright (C) 2002 Jet Propulsion Laboratory, California Institute of Technology. All rights reserved. Permission for commercial reproduction other than for single-school in- classroom use must be obtained from JPL Commercial Programs Office. 1 SETUP 1.1 DOWNLOAD AND PRINT o You'll need Adobe Acrobat Reader software to read the Parts Sheet file. You'll find instructions for downloading the software free of charge from Adobe on the web page where you found this model. o Download the Parts file from the web page to your computer. It contains paper model parts on several pages of annotated graphics. o Print the Parts file with a black & white printer; a laser printer gives best results. It is highly recommended to print onto card stock (such as 110 pound cover paper). If you can't print onto card stock, regular paper will do, but assembly will be more difficult, and the model will be much more fragile. In any case, the card stock or paper should be white. The Parts file is designed for either 8.5x11-inch or A4 sheet sizes. o Check the "PRINTING CALIBRATION" on each Parts Sheet with a ruler, to be sure the cm or inch scale is full size. If it isn't, adjust the printout size in your printing software. -

Mars Exploration - a Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani
Chapter Introductory Chapter: Mars Exploration - A Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani 1. Introduction Mars has been a goal of exploration programs of the most important space agencies all over the world for decades. It is, in fact, the most investigated celestial body of the Solar System. Mars robotic exploration began in the 1960s of the twentieth century by means of several space probes sent by the United States (US) and the Soviet Union (USSR). In the recent past, also European, Japanese, and Indian spacecrafts reached Mars; while other countries, such as China and the United Arab Emirates, aim to send spacecraft toward the red planet in the next future. 1.1 Exploration aims The high number of mission explorations to Mars clearly points out the impor- tance of Mars within the Solar System. Thus, the question is: “Why this great interest in Mars exploration?” The interest in Mars is due to several practical, scientific, and strategic reasons. In the practical sense, Mars is the most accessible planet in the Solar System [1]. It is the second closest planet to Earth, besides Venus, averaging about 360 million kilometers apart between the furthest and closest points in its orbit. Earth and Mars feature great similarities. For instance, both planets rotate on an axis with quite the same rotation velocity and tilt angle. The length of a day on Earth is 24 h, while slightly longer on Mars at 24 h and 37 min. The tilt of Earth axis is 23.5 deg, and Mars tilts slightly more at 25.2 deg [2]. -

The Isis3 Bundle Adjustment for Extraterrestrial Photogrammetry
ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume I-4, 2012 XXII ISPRS Congress, 25 August – 01 September 2012, Melbourne, Australia JIGSAW: THE ISIS3 BUNDLE ADJUSTMENT FOR EXTRATERRESTRIAL PHOTOGRAMMETRY K. L. Edmundson*, D. A. Cook, O. H. Thomas, B. A. Archinal, R. L. Kirk Astrogeology Science Center, U.S. Geological Survey, Flagstaff, AZ, USA, 86001 - [email protected] Commission IV, WG IV/7 KEY WORDS: Bundle Adjustment, Estimation, Extraterrestrial, Planetary, Space ABSTRACT: The Integrated Software for Imagers and Spectrometers (ISIS) package was developed by the Astrogeology Science Center of the U.S. Geological Survey in the late 1980s for the cartographic and scientific processing of planetary image data. Initial support was implemented for the Galileo NIMS instrument. Constantly evolving, ISIS has since added support for numerous missions, including most recently the Lunar Reconnaissance Orbiter, MESSENGER, and Dawn missions, plus support for the Metric Cameras flown onboard Apollo 15, 16, and 17. To address the challenges posed by extraterrestrial photogrammetry, the ISIS3 bundle adjustment module, jigsaw, is evolving as well. Here, we report on the current state of jigsaw including improvements such as the implementation of sparse matrix methods, parameter weighting, error propagation, and automated robust outlier detection. Details from the recent processing of Apollo Metric Camera images and from recent missions such as LRO and MESSENGER are given. Finally, we outline future plans for jigsaw, including the implementation of sequential estimation; free network adjustment; augmentation of the functional model of the bundle adjustment to solve for camera interior orientation parameters and target body parameters of shape, spin axis position, and spin rate; the modeling of jitter in line scan sensors; and the combined adjustment of images from a variety of platforms. -

Planetary Science
Mission Directorate: Science Theme: Planetary Science Theme Overview Planetary Science is a grand human enterprise that seeks to discover the nature and origin of the celestial bodies among which we live, and to explore whether life exists beyond Earth. The scientific imperative for Planetary Science, the quest to understand our origins, is universal. How did we get here? Are we alone? What does the future hold? These overarching questions lead to more focused, fundamental science questions about our solar system: How did the Sun's family of planets, satellites, and minor bodies originate and evolve? What are the characteristics of the solar system that lead to habitable environments? How and where could life begin and evolve in the solar system? What are the characteristics of small bodies and planetary environments and what potential hazards or resources do they hold? To address these science questions, NASA relies on various flight missions, research and analysis (R&A) and technology development. There are seven programs within the Planetary Science Theme: R&A, Lunar Quest, Discovery, New Frontiers, Mars Exploration, Outer Planets, and Technology. R&A supports two operating missions with international partners (Rosetta and Hayabusa), as well as sample curation, data archiving, dissemination and analysis, and Near Earth Object Observations. The Lunar Quest Program consists of small robotic spacecraft missions, Missions of Opportunity, Lunar Science Institute, and R&A. Discovery has two spacecraft in prime mission operations (MESSENGER and Dawn), an instrument operating on an ESA Mars Express mission (ASPERA-3), a mission in its development phase (GRAIL), three Missions of Opportunities (M3, Strofio, and LaRa), and three investigations using re-purposed spacecraft: EPOCh and DIXI hosted on the Deep Impact spacecraft and NExT hosted on the Stardust spacecraft. -

The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions
Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions Presented at the 2007 ISPA/SCEA Joint International Conference & Workshop June 12-15, New Orleans, LA Bob Bitten, Debra Emmons, Claude Freaner 1 Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com Abstract • The upcoming retirement of the Delta II family of launch vehicles leaves a performance gap between small expendable launch vehicles, such as the Pegasus and Taurus, and large vehicles, such as the Delta IV and Atlas V families • This performance gap may lead to a variety of progressions including – large satellites that utilize the full capability of the larger launch vehicles, – medium size satellites that would require dual manifesting on the larger vehicles or – smaller satellites missions that would require a large number of smaller launch vehicles • This paper offers some comparative costs of co-manifesting single- instrument missions on a Delta IV/Atlas V, versus placing several instruments on a larger bus and using a Delta IV/Atlas V, as well as considering smaller, single instrument missions launched on a Minotaur or Taurus • This paper presents the results of a parametric study investigating the cost- effectiveness of different alternatives and their effect on future NASA missions that fall into the Small Explorer (SMEX), Medium Explorer (MIDEX), Earth System Science Pathfinder (ESSP), Discovery, -

Insight Spacecraft Launch for Mission to Interior of Mars
InSight Spacecraft Launch for Mission to Interior of Mars InSight is a robotic scientific explorer to investigate the deep interior of Mars set to launch May 5, 2018. It is scheduled to land on Mars November 26, 2018. It will allow us to better understand the origin of Mars. First Launch of Project Orion Project Orion took its first unmanned mission Exploration flight Test-1 (EFT-1) on December 5, 2014. It made two orbits in four hours before splashing down in the Pacific. The flight tested many subsystems, including its heat shield, electronics and parachutes. Orion will play an important role in NASA's journey to Mars. Orion will eventually carry astronauts to an asteroid and to Mars on the Space Launch System. Mars Rover Curiosity Lands After a nine month trip, Curiosity landed on August 6, 2012. The rover carries the biggest, most advanced suite of instruments for scientific studies ever sent to the martian surface. Curiosity analyzes samples scooped from the soil and drilled from rocks to record of the planet's climate and geology. Mars Reconnaissance Orbiter Begins Mission at Mars NASA's Mars Reconnaissance Orbiter launched from Cape Canaveral August 12. 2005, to find evidence that water persisted on the surface of Mars. The instruments zoom in for photography of the Martian surface, analyze minerals, look for subsurface water, trace how much dust and water are distributed in the atmosphere, and monitor daily global weather. Spirit and Opportunity Land on Mars January 2004, NASA landed two Mars Exploration Rovers, Spirit and Opportunity, on opposite sides of Mars. -
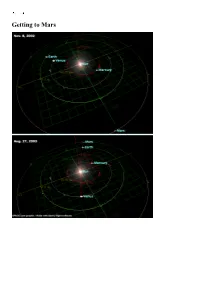
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No. -

Solarhub Maxar’S Lunar Vertical Solar Array Technology
SolarHub Maxar’s Lunar Vertical Solar Array Technology Presented to the Lunar Surface Innovation Consortium (LSIC) 2021-05-27 Approved for External Release MAXAR AND LUNAR EXPLORATION Solar Power Use or disclosure of the data contained on this sheet © 2021 Maxar Technologies 2 is subject to the restrictions on the cover page A MISSION PARTNER WITH PROVEN HERITAGE With more than 60 years of experience, Maxar is a trusted partner for government and commercial missions. Our renowned Space Infrastructure capabilities date back to the Apollo Moon landing and continue to serve the most demanding missions: ▪ Communications and Earth observation ▪ Space exploration ▪ Solar electric propulsion ▪ On-orbit servicing and assembly 285+ 2,750 80+ 2.4+ Maxar-built spacecraft Combined Communication Billion people rely on launched years on orbit satellites on orbit broadcasting services powered by Maxar-built satellites Use or disclosure of the data contained on this sheet © 2021 Maxar Technologies is subject to the restrictions on the cover page 3 MAXAR IS A GLOBALLY TRUSTED LEADER DELIVERING SPACE INFRASTRUCTURE AND EARTH INTELLIGENCE SPACE INFRASTRUCTURE EARTH INTELLIGENCE Use or disclosure of the data contained on this sheet © 2021 Maxar Technologies 4 is subject to the restrictions on the cover page Psyche spacecraft chassis, power & MAXAR SPACE INFRASTRUCTURE propulsion ▪ 60+ years building high reliability spacecraft ▪ Launched 285+ LEO & GEO satellites ▪ Leader in Solar Electric Propulsion (SEP) ▪ High heritage in: − power management and distribution -
Phoenix Descending NASA’S Mars Strategy Goes from “Follow the Water” to “Arrive at the Ice”
NEWS NATURE|Vol 453|8 May 2008 Phoenix descending NASA’s Mars strategy goes from “follow the water” to “arrive at the ice”. Since 2001, the slogan for from hardware and software. NASA’s Mars programme has “We may not succeed, but we NASA been “follow the water”. deserve to succeed,” he says. With Phoenix, a US$420- Engineers at the Jet Propul- million mission to the edge of sion Laboratory in Pasadena, the planet’s north ice cap, the California, which runs most of agency hopes to finally touch NASA’s planetary missions, will its quarry, in the form of dirty have their last chance to tweak water ice scraped from the the trajectory on 24 May. The subsurface and melted in the next day, Phoenix is expected probe’s on-board ovens. to use the planet’s atmosphere, If all goes as planned, Phoenix and its own heat shielding, will reach the end of its 680- parachutes and retrorockets, to million-kilometre, 10-month- slow itself down from an orbital long journey on 25 May. Its speed of 20,000 kilometres per landing site is in a region where hour to a soft, safe landing at NASA’s orbiting Mars Odyssey just 2.4 metres per second. spacecraft has detected gamma-ray and neu- Phoenix, a 350-kilogram lander, inherited Smith and his team hope that the ice and soil tron signatures suggesting a significant amount hardware from the Mars Surveyor Lander, a samples they will study with the spacecraft’s of hydrogen — thought to be a constituent of mission cancelled in 2000 after the failure of mass-spectrometer and chemical analysis sys- frozen water — near the surface. -

The Mars Surveyor Program - Planned Orbiter and Lander for 2001
Lunar and Planetary Science XXXI 1776.pdf THE MARS SURVEYOR PROGRAM - PLANNED ORBITER AND LANDER FOR 2001. R. S. Saunders, Jet Propulsion Laboratory, 180-701, 4800 Oak Grove Drive, Pasadena, CA 91109, [email protected]. Introduction: Following the loss of the Mars Cli- An additional experiment, the Martian Radiation mate Orbiter and the Mars Polar Lander, the Mars Environment Experiment (MARIE) is an energetic Surveyor Program is undergoing a replanning effort. particle spectrometer designed to measure the near There is currently no anticipated change to the 2001 space radiation environment as related to the radiation orbiter science payload, which is scheduled for launch hazard to human explorers. This is one of the Human on March 30, 2001. If launched on schedule, the or- Exploration and Development of Space Enterprise biter will arrive at Mars on Oct. 20, 2001. The 2001 (HEDS) experiments that was selected for the 2001 orbiter carries the Gamma Ray Spectrometer (GRS) mission to acquire data needed before planning human (based on science objectives lost with Mars Observer) missions to Mars. MARIE will determine the radia- and the Thermal Emission Imaging System tion energy spectrum, separate the contribution from (THEMIS). The Mars Surveyor 2001 Lander is sched- various particles, and measure the accumulated ab- uled to launch on April 10, 2001 and will land on sorbed dose and dose rate that would occur in human Mars on January 22, 2002, about three months after tissue. the orbiter arrives and about two weeks after the or- Lander Site Selection: During the past year, the biter achieves its mapping orbit following a 76 day planetary science community was engaged in selecting aerobraking sequence.