The Isis3 Bundle Adjustment for Extraterrestrial Photogrammetry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2001 Mars Odyssey 1/24 Scale Model Assembly Instructions
2001 Mars Odyssey 1/24 Scale Model Assembly Instructions This scale model of the 2001 Mars Odyssey spacecraft is designed for anyone interested, although it might be inappropriate for children younger than about ten years of age. Children should have adult supervision to assemble the model. Copyright (C) 2002 Jet Propulsion Laboratory, California Institute of Technology. All rights reserved. Permission for commercial reproduction other than for single-school in- classroom use must be obtained from JPL Commercial Programs Office. 1 SETUP 1.1 DOWNLOAD AND PRINT o You'll need Adobe Acrobat Reader software to read the Parts Sheet file. You'll find instructions for downloading the software free of charge from Adobe on the web page where you found this model. o Download the Parts file from the web page to your computer. It contains paper model parts on several pages of annotated graphics. o Print the Parts file with a black & white printer; a laser printer gives best results. It is highly recommended to print onto card stock (such as 110 pound cover paper). If you can't print onto card stock, regular paper will do, but assembly will be more difficult, and the model will be much more fragile. In any case, the card stock or paper should be white. The Parts file is designed for either 8.5x11-inch or A4 sheet sizes. o Check the "PRINTING CALIBRATION" on each Parts Sheet with a ruler, to be sure the cm or inch scale is full size. If it isn't, adjust the printout size in your printing software. -

Planetary Science
Mission Directorate: Science Theme: Planetary Science Theme Overview Planetary Science is a grand human enterprise that seeks to discover the nature and origin of the celestial bodies among which we live, and to explore whether life exists beyond Earth. The scientific imperative for Planetary Science, the quest to understand our origins, is universal. How did we get here? Are we alone? What does the future hold? These overarching questions lead to more focused, fundamental science questions about our solar system: How did the Sun's family of planets, satellites, and minor bodies originate and evolve? What are the characteristics of the solar system that lead to habitable environments? How and where could life begin and evolve in the solar system? What are the characteristics of small bodies and planetary environments and what potential hazards or resources do they hold? To address these science questions, NASA relies on various flight missions, research and analysis (R&A) and technology development. There are seven programs within the Planetary Science Theme: R&A, Lunar Quest, Discovery, New Frontiers, Mars Exploration, Outer Planets, and Technology. R&A supports two operating missions with international partners (Rosetta and Hayabusa), as well as sample curation, data archiving, dissemination and analysis, and Near Earth Object Observations. The Lunar Quest Program consists of small robotic spacecraft missions, Missions of Opportunity, Lunar Science Institute, and R&A. Discovery has two spacecraft in prime mission operations (MESSENGER and Dawn), an instrument operating on an ESA Mars Express mission (ASPERA-3), a mission in its development phase (GRAIL), three Missions of Opportunities (M3, Strofio, and LaRa), and three investigations using re-purposed spacecraft: EPOCh and DIXI hosted on the Deep Impact spacecraft and NExT hosted on the Stardust spacecraft. -

Insight Spacecraft Launch for Mission to Interior of Mars
InSight Spacecraft Launch for Mission to Interior of Mars InSight is a robotic scientific explorer to investigate the deep interior of Mars set to launch May 5, 2018. It is scheduled to land on Mars November 26, 2018. It will allow us to better understand the origin of Mars. First Launch of Project Orion Project Orion took its first unmanned mission Exploration flight Test-1 (EFT-1) on December 5, 2014. It made two orbits in four hours before splashing down in the Pacific. The flight tested many subsystems, including its heat shield, electronics and parachutes. Orion will play an important role in NASA's journey to Mars. Orion will eventually carry astronauts to an asteroid and to Mars on the Space Launch System. Mars Rover Curiosity Lands After a nine month trip, Curiosity landed on August 6, 2012. The rover carries the biggest, most advanced suite of instruments for scientific studies ever sent to the martian surface. Curiosity analyzes samples scooped from the soil and drilled from rocks to record of the planet's climate and geology. Mars Reconnaissance Orbiter Begins Mission at Mars NASA's Mars Reconnaissance Orbiter launched from Cape Canaveral August 12. 2005, to find evidence that water persisted on the surface of Mars. The instruments zoom in for photography of the Martian surface, analyze minerals, look for subsurface water, trace how much dust and water are distributed in the atmosphere, and monitor daily global weather. Spirit and Opportunity Land on Mars January 2004, NASA landed two Mars Exploration Rovers, Spirit and Opportunity, on opposite sides of Mars. -
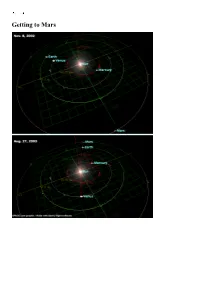
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No. -
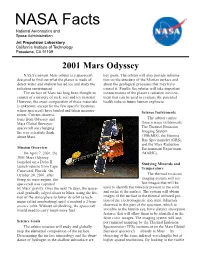
Odyssey NASA’S Newest Mars Orbiter Is a Spacecraft Key Goals
NASA Facts National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 2001 Mars Odyssey NASA’s newest Mars orbiter is a spacecraft key goals. The orbiter will also provide informa- designed to find out what the planet is made of, tion on the structure of the Martian surface and detect water and shallow buried ice and study the about the geological processes that may have radiation environment. caused it. Finally, the orbiter will take important The surface of Mars has long been thought to measurements of the planet’s radiation environ- consist of a mixture of rock, soil and icy material. ment that can be used to evaluate the potential However, the exact composition of these materials health risks to future human explorers. is unknown, except for the few specific locations where spacecraft have landed and taken measure- Science Instruments ments. Current observa- tions from Odyssey and The orbiter carries Mars Global Surveyor three science instruments: spacecraft are changing The Thermal Emission the way scientists think Imaging System about Mars. (THEMIS), the Gamma Ray Spectrometer (GRS), and the Mars Radiation Mission Overview Environment Experiment On April 7, 2001, the (MARIE). 2001 Mars Odyssey launched on a Delta II Studying Minerals and launch vehicle from Cape Temperature Canaveral, Florida. On October 24, 2001, after The thermal emission firing its main engine, the imaging system will col- spacecraft was captured lect images that will be by Mars’ gravity. Over the next 76 days, the space- used to identify the minerals present in the soils craft gradually edged closer to Mars, using the fric- and rocks at the surface. -

Dawn of a New Mission Begins
J a n u a ry 4, 2002 I n s i d e Volume 32 Number 1 2001 In Review . 2-3 Special Events Calendar . 4 Letters, Classifieds . 4 Jet Propulsion Laboratory about the formation of the solar system. Using the same set of instru- ments to observe these two bodies, both located in the main asteroid belt between Mars and Jupiter, Dawn will improve our understanding of how planets formed during the earliest epoch of the solar system. Ceres has quite a primitive surface, water-bearing minerals, and possibly a very weak atmosphere and frost. Vesta is a dry body that has been resurfaced by basaltic lava flows, and may have an early magma Dawn of ocean like Earth’s moon. Like the moon, it has been hit many times by smaller space rocks, and these impacts have sent out meteorites at least five times in the last 50 million years. a new The mission will determine these pre-planets’ physical attributes, such as shape, size, mass, craters and internal structure, and study more complex properties such as composition, density and magnetism. mission The mission will determine these pre-planets’ physical attributes, such as shape, size, mass, craters and internal structure, and study more complex properties such as composition, density and magnetism. begins ’02 JPLERS ENDED 2001 saying goodbye to Deep During its nine-year journey through the asteroid belt, Dawn will rendezvous with Vesta and Ceres, orbiting from as high as 800 kilome - Space 1 and looking forwa r d to a new Dawn—a mission ters (500 miles) to as low as 100 kilometers (about 62 miles) above the surface. -

Student Version
Strange New Planet Student Version Adapted from NASA’s “Mars Activities: Teacher Resources Version and Classroom Activities – Strange New Planet” located at mars.jpl.nasa.gov/classroom/pdfs/MSIP-MarsActivities.pdf Why should your team do this activity? Your team should now be somewhat familiar with Mars, the planet your Rover will be designed to navigate and explore. Why do we send rovers to planets in the first place? Well, different kinds of spacecraft are able to make different kinds of observations. Think about how different the information gathered by looking at a planet from Earth is from the information that a rover might collect. The information that a rover can gather about rock materials on the surface of Mars is much more specific than what an astronomer can collect simply by looking through a telescope. Yet the astronomer’s information is necessary to successfully land and operate a rover on the surface of another planet, right?. As you will see, each kind of mission has its advantages and drawbacks. During this activity, your team will explore a strange new planet, one that your teacher has made especially for you. You will explore this planet just like NASA explores Mars. As you make observations, you will make decisions about what your team would like to explore further. Your observations will continually refine the goals of your exploration. During the last phase of exploration, you will land on the surface and carry out your investigations. Happy exploring! The Necessities: A planet (your teacher will provide this) Planetary viewers, one for each team member (your teacher will help you with this) One 5 inch by 5 inch blue piece of cellophane paper and rubber band per member Pen or pencil Idaho TECH Lab Notebook Directions Your teacher will guide your team through this activity. -

Proposal Information Package
NASA RESEARCH ANNOUNCEMENT PROPOSAL INFORMATION PACKAGE Mars Exploration Program 2001 Mars Odyssey Orbiter 23 July 2001 Contributors Raymond Arvidson1 Jeffrey J. Plaut5 Gautam Badhwar2 Susan Slavney1 William Boynton3 David A. Spencer5 Philip Christensen4 Compiled by Thomas W. Thompson5 Jeffrey J. Plaut5 Catherine M. Weitz6 1Washington University, 2Johnson Space Center, 3Lunar and Planetary Laboratory (University of Arizona), 4Arizona State University, 5Jet Propulsion Laboratory, California Institute of Technology 6NASA Headquarters. Table of Contents 1.0 Overview..............................................................................................................................................................1-1 1.1 Document Overview.............................................................................................................................1-1 1.2 Mars Exploration Program...................................................................................................................1-1 1.3 Mars 2001 Objectives...........................................................................................................................1-2 1.4 Mars 2001 Operations Management....................................................................................................1-2 1.5 Mars 2001 Orbiter Measurement Synergies through Coordinated Operations Planning ..................1-2 1.6 Mars 2001 Project Science Group (PSG) Members............................................................................1-3 2.0 Mars -

Publications 2001-2017
Publications 2001-2017: 2017 Park, R.S., W.M. Folkner, A.S. Konopliv, D.E. Smith and M.T. Zuber, Precession of Mercury’s perihelion from ranging to the MESSENGER spacecraft, Astronom. Jour., 153, doi: 10.3847/1538-3881/aa5be2, 2017 Baker, D.M.H., J.W. Head, R.J. Phillips, G.A. Neumann, C.J. Bierson, D.E. Smith and M.T. Zuber, GRAIL gravity observations of the transition from complex crater to peak-ring basin on the Moon: Implications for crustal structure and impact basin formation, Icarus, 292, 54-73, doi: 10.1016/j.icarus.2017.03.024, 2017 Fisher, E, A., P.J. Lucey, M. Lemelin, B.T. Greenhagen, M.A. Siegler, E. Mazrico, O. Aharonson, J.-P. Williams, P.O. Hayne, G.A. Neumann, D. Paige, D.E. Smith, and M.T. Zuber, Evidence for surface water ice in the lunar polar regions, using reflectance measurements from the Lunar Orbiter Laser Altimeter and temperature measurements from the Diviner Lunar Radiometer Experiment, Icarus, 292, doi: 10.1016/j.icarus.2017.03.023, 2017 Ermakov, A.I., R.R. Fu, C.A. Raymond, R.S. Park, F. Preusker, C.T. Russell, D.E. Smith and M.T. Zuber, Constraints on Ceres' internal structure and evolution from its shape and gravity measured by the Dawn spacecraft, submitted to J. Geophys. Res. Planets, 2017 Hand, K.P., et al, Report of the Europa Lander Science Definition Team. Posted February, 2017 2016 McGarry, J.R., D.-d. Mao, E. Mazarico, G.A. Neumann, Z. Sun, M.H. Torrence, M.K. Barker, E. -

Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin Benchmarks content author: Elisabeth Ambrose, Department of Astronomy, University of Texas at Austin Project funded by the Center for Instructional Technologies, University of Texas at Austin http://www.edb.utexas.edu/missiontomars/bench/bench.html Table of Contents Mariner 4 3 Mariner 6-7 3 Mariner 9 3 Viking 1-2 4 Mars Pathfinder/Sojurner Rover 5 Mars Global Surveyor 6 2001 Mars Odyssey 6 2003 Mars Exploration Rovers 7 2005 Mars Reconnaissance Orbiter 7 Smart Lander and Long-Range Rover 8 Scout Missions 8 Sample Return and Other Missions 8 References 9 2 Previous, Current, and Future Missions to Mars By: Elisabeth Ambrose Mariner 4 analyzed the Martian atmosphere with Mariner 4 was a small robotic remote sensing equipment. The data spacecraft that was sent to Mars on that Mariner 6 and Mariner 7 collected November 28, 1964 to complete one confirmed that the dark lanes seen on flyby. It flew over Mars in July, 1965 and Mars from Earth were not canals, as was took pictures of the surface with its digital previously thought. tape recorder. The images showed Mariner 9 lunar-type impact craters. After its flyby, Mariner 9 was also a small robotic it continued in orbit around the Sun for spacecraft, and it was launched on May three years. 30, 1971. Unlike Mariner 4, 6, and 7, Mariner 6-7 which simply flew by Mars, Mariner 9 Mariner 6 and Mariner 7 were was designed to establish an orbit identical small robotic spacecraft that around the planet. -

Information Summary Assurance in Lieu of the Requirement for the Launch Service Provider Apollo Spacecraft to the Moon
National Aeronautics and Space Administration NASA’s Launch Services Program he Launch Services Program was established for mission success. at Kennedy Space Center for NASA’s acquisi- The principal objectives are to provide safe, reli- tion and program management of Expendable able, cost-effective and on-schedule processing, mission TLaunch Vehicle (ELV) missions. A skillful NASA/ analysis, and spacecraft integration and launch services contractor team is in place to meet the mission of the for NASA and NASA-sponsored payloads needing a Launch Services Program, which exists to provide mission on ELVs. leadership, expertise and cost-effective services in the The Launch Services Program is responsible for commercial arena to satisfy Agencywide space trans- NASA oversight of launch operations and countdown portation requirements and maximize the opportunity management, providing added quality and mission information summary assurance in lieu of the requirement for the launch service provider Apollo spacecraft to the Moon. to obtain a commercial launch license. The powerful Titan/Centaur combination carried large and Primary launch sites are Cape Canaveral Air Force Station complex robotic scientific explorers, such as the Vikings and Voyag- (CCAFS) in Florida, and Vandenberg Air Force Base (VAFB) in ers, to examine other planets in the 1970s. Among other missions, California. the Atlas/Agena vehicle sent several spacecraft to photograph and Other launch locations are NASA’s Wallops Island flight facil- then impact the Moon. Atlas/Centaur vehicles launched many of ity in Virginia, the North Pacific’s Kwajalein Atoll in the Republic of the larger spacecraft into Earth orbit and beyond. the Marshall Islands, and Kodiak Island in Alaska. -
Successes and Failures of Recent Mars Exploration
Successes and Failures of Recent Mars Exploration Paul Withers [email protected] Boston University’s Center for Space Physics 2004.02.13 Bill Waller’s undergrad seminar class at Tufts University Aims of this talk • Describe the past decade of Mars exploration • Describe how half of attempted missions failed • Describe how NASA responded to failures in short and long term • Discuss lessons learned • Not an overview of Mars science Sequence of Missions • Mars Observer (1992) failure • Mars 96 (1996) [Russia] failure • Mars Pathfinder (1996) success • Mars Global Surveyor (1996) success • Nozomi (1998) [Japan] failure • Mars Climate Orbiter (1998) failure • Mars Polar Lander (1999) failure • Deep Space 2 (1999) (2 small probes) failure (x2) • 2001 Mars Odyssey (2001) success • Mars Express (2003) [ESA] success (?) • Beagle 2 (2003) [ESA/UK] failure • Mars Exploration Rovers Spirit and Opportunity (2003) success (x2) (?) • 12 years, 14 spacecraft, 8 failures, 3 successes, 3 probable successes Mars Observer (1992) Scientific Aims of Mars Observer • Global topo and gravity map • Measure magnetic field • Elemental makeup of surface • 2m-pixel images of surface • Mineralogical map of surface • Study atmospheric circulation • $980 mission, first US mission to Mars since Viking in 1976. Failure of Mars Observer • Plan: Pressurize fuel tank a few days before Mars Orbit Insertion • Plan: Turn transmitter off during pressurization to protect its components from shock, turn on again after pressurization complete • Reality: No further transmissions received after start of pressurization, complete loss of mission. • Failure Analysis: A fuel line ruptured during pressurization and the corrosive fuel disabled the spacecraft. Some parts were designed assuming pressurization after launch, not many months after launch.