(Mefs) and Crash Modification Factors (Cmfs) for TSM&O Strategies
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Service Patrol Handbook
FEDERAL HIGHWAY ADMINISTRATION SERVICE PATROL HANDBOOK November 2008 NOTICE This document is disseminated under the sponsorship of the department of transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. This report does not constitute a standard, specification, or regulation. The United States Government does not endorse products or manufacturers. Trade and manufacturers’ names appear in this report only because they are considered essential to the object of the document. i Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. FHWA-HOP-08-031 4. Title and Subtitle 5. Report Date Service Patrol Handbook November 2008 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Nancy Houston, Craig Baldwin, Andrea Vann Easton, Steve Cyra, P.E., P.T.O.E., Marc Hustad, P.E., Katie Belmore, EIT 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) Booz Allen Hamilton HNTB Corporation 8283 Greensboro Drive 11414 West Park Place, Suite 300 McLean, Virginia 22102 Milwaukee, WI 53224 11. Contract or Grant No. 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Federal Highway Administration, HOTO-1 Final Report U. S. Department of Transportation 1200 New Jersey Avenue SE 14. Sponsoring Agency Code Washington, D. C. 20590 HOTO, FHWA 15. Supplementary Notes Paul Sullivan, FHWA Office of Operations, Office of Transportation Operations, Contracting Officer’s Technical Representative (COTR). Handbook development was performed under contract to Booz Allen Hamilton. 16. Abstract This Handbook provides an overview of the Full-Function Service Patrol (FFSP) and describes desired program characteristics from the viewpoint of an agency that is responsible for funding, managing, and operating the services. -

AGENCY for HEALTH CARE ADMINISTRATION EMERGENCY OPERATIONS PLAN INTRODUCTION the State of Florida Has Developed a Plan to Respon
AGENCY FOR HEALTH CARE ADMINISTRATION EMERGENCY OPERATIONS PLAN INTRODUCTION The State of Florida has developed a plan to respond to natural and man-made disasters, that provides a method for the delivery of goods and services to affected areas quickly and decisively. The plan is initiated in Tallahassee at the State Emergency Operations Center (SEOC) where the seventeen emergency Support Functions (ESF’s) are activated. A brief description of each ESF is contained in this manual. OVERVIEW OF EMERGENCY SUPPORT FUNCTIONS (ESF) In a widespread emergency the needs may be complex and far-reaching. Seventeen areas of responsibility have been established to coordinate emergency preparedness, response, and recovery. Those areas are known as Emergency Support Functions (ESF). There is one agency with primary responsibility for operating each ESF. Other agencies are tasked with supporting roles. ESF’s are the functional support roles of the State Emergency Response Team (SERT). The details of each function are in the state plan. The details of how the jobs are to be done are in procedures developed by the primary agency of an ESF. These are the emergency support functions and the agencies with primary responsibility for them. These seventeen Emergency Support Functions are the backbone of Florida’s emergency management program. Listed below are the Emergency Support Functions and their agencies with primary and support responsibility: ESF 1 TRANSPORTATION Primary Agency: Department of Transportation Coordinate the use of transportation resources to support the needs of local governments, voluntary organizations and other emergency support groups requiring transportation capacity to perform their emergency response, recovery and assistance missions. -
Census of State and Local Law Enforcement Agencies, 2004 by Brian A
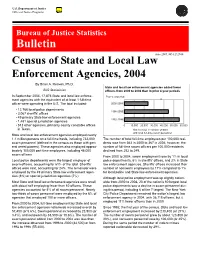
U.S. Department of Justice Office of Justice Programs Bureau of Justice Statistics Bulletin June 2007, NCJ 212749 Census of State and Local Law Enforcement Agencies, 2004 By Brian A. Reaves, Ph.D. State and local law enforcement agencies added fewer BJS Statistician officers from 2000 to 2004 than in prior 4-year periods In September 2004, 17,876 State and local law enforce- Four-year period ment agencies with the equivalent of at least 1 full-time officer were operating in the U.S. The total included: 2000-2004 • 12,766 local police departments 1996-2000 • 3,067 sheriffs' offices • 49 primary State law enforcement agencies 1992-1996 • 1,481 special jurisdiction agencies • 513 other agencies, primarily county constable offices 0 10,000 20,000 30,000 40,000 50,000 60,000 in Texas. Net increase in number of State and local full-time sworn personnel State and local law enforcement agencies employed nearly 1.1 million persons on a full-time basis, including 732,000 The number of total full-time employees per 100,000 resi- sworn personnel (defined in the census as those with gen- dents rose from 362 in 2000 to 367 in 2004; however, the eral arrest powers). These agencies also employed approx- number of full-time sworn officers per 100,000 residents imately 105,000 part-time employees, including 46,000 declined from 252 to 249. sworn officers. From 2000 to 2004, sworn employment rose by 1% in local Local police departments were the largest employer of police departments, 6% in sheriffs’ offices, and 2% in State sworn officers, accounting for 61% of the total. -

Police Department
If you have issues viewing or accessing this file, please contact us at NCJRS.gov. Enhancing Public Safety by Leveraging Resources 0 --.. A Resource Guide for Law Enforcement Agencies J @ 0 @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ This project was supported by Award No. 2002-DD-BX-0010 awarded by @ the Bureau of Justice Assistance, Office of Justice Programs. The opinions, @ findings, and conclusions or recommendations expressed in this @ publication are those of the author(s) and do not necessarily reflect the @ views of the Department of Justice. @ @ @ @ @ 0 0 2o 5957 0 0 0 Table of Contents 0 0 0 0 Executive Summary ..................................................................................................................... i 0 Part h Establishing or Enhancing a Volunteer Program 0 0 Section 1: Introduction .................................................................................................... 1 0 0 Section 2: The Current State of Volunteerism .............................................................. 4 0 Section 3: Building Program Infrastructure ................................................................. 8 0 0 Section 4: Recruitment ....................................................................................................16 0 0 Section 5: Selection and Management ..........................................................................20 0 Section 6: Training ..........................................................................................................24 -

The Florida Department of Highway Safety and Motor Vehicles Statement of Agency Organization and Operation
The Florida Department of Highway Safety and Motor Vehicles Statement of Agency Organization and Operation This statement of agency organization and operation has been prepared in accordance with the requirements of Section 28‐101.001, Florida Administrative Code and is available to any person upon request. The Florida Department of Highway Safety and Motor Vehicles (FLHSMV) was created by Chapter 20.24, Florida Statutes. The mission of FLHSMV is “Providing Highway Safety and Security Through Excellence in Service, Education, and Enforcement.” The department provides services by partnering with county tax collectors and local, state, and federal law enforcement agencies to promote a safe driving environment. The department coordinates with its partners to issue driver licenses and identification cards, facilitate motor vehicle transactions, and provide services related to consumer protection and public safety. The department is composed of four divisions: Florida Highway Patrol, Motorist Services, Administrative Services, and Information Systems Administration; these divisions are overseen by the Office of the Executive Director. The department’s duties, responsibilities, and procedures are mandated through Chapters 207, 316, 317, 318, 319, 320, 321, 322, 323, 324, 328, 488, and Section 627.730 – 627.7405, Florida Statutes as well as Chapter 15‐1 of the Florida Administrative Code. The agency head of the department is the Governor and Cabinet with authority delegated to the Executive Director. The Executive Director supervises, directs, coordinates, and administers all activities of the department. More information about the Florida Department of Highway Safety and Motor Vehicles can be found at www.flhsmv.gov, or by contacting us at the information below. -

Census of State and Local Law Enforcement Agencies, 2008 Brian A
U.S. Department of Justice Office of Justice Programs Bureau of Justice Statistics July 2011, NCJ 233982 Bulletin Census of State and Local Law Enforcement Agencies, 2008 Brian A. Reaves, Ph.D., BJS Statistician n September 2008, state and local law enforcement FIGURE 1 agencies employed more than 1.1 million persons Net increase in full-time sworn personnel employed on a full-time basis, including about 765,000 by state and local law enforcement agencies, per Isworn personnel (defined as those with general arrest 4-year period, 1992–2008 powers). Agencies also employed approximately 100,000 part-time employees, including 44,000 sworn officers. These findings come from the 2008 Bureau 2004-2008 33,343 of Justice Statistics’ (BJS) Census of State and Local Law Enforcement Agencies (CSLLEA), the fifth such census to be conducted since the quadrennial series 2000-2004 23,881 began in 1992. From 2004 to 2008, state and local agencies added a net total of about 33,000 full-time sworn personnel. 1996-2000 44,487 This was about 9,500 more than agencies added from 2000 to 2004 (figure 1), reversing a trend of declining growth observed in prior 4-year comparisons based 1992-1996 on the CSLLEA. Local police departments added the 55,513 most officers, about 14,000. Sheriffs’ offices and spe- cial jurisdiction agencies added about 8,000 officers Net increase each. From 2004 to 2008, the number of full-time sworn personnel per 100,000 U.S. residents increased from 250 to 251. HIGHLIGHTS State and local law enforcement agencies employed From 2004 to 2008, state and local law enforcement about 1,133,000 persons on a full-time basis in 2008, agencies added about 9,500 more full-time sworn including 765,000 sworn personnel. -
2017-274 Executive Order Terminating EO-264 Re
STATE OF FLORIDA OFFICE OF THE GOVERNOR EXECUTIVE ORDER NUMBER 17-274 (Emergency Management-Termination ofExecutive Order 17-264) WHEREAS, on October 16, 2017, at the request of Alachua County Sheriff Sadie Darnell, I issued Executive Order 17-264, which provided for the necessary and appropriate coordination of law enforcement resources to protect against threats of violent protests and counter-protests connected with scheduled rallies at the University of Florida; and WHEREAS, in reliance upon Executive Order 17-264, state and local agencies including the Florida Highway Patrol, the Florida Department of Law Enforcement, the Florida National Guard, the Florida Fish and Wildlife Conservation Commission, the Alachua County Sheriffs Office, the Gainesville Police Department, the University of Florida Police Department, the Alachua County Fire Rescue, the Gainesville Fire Rescue, the 8th Judicial Circuit State Attorney's Office, and a variety of other county sheriffs and municipal police departments, worked tirelessly in the ensuing days to establish a safe and controlled environment at the University of Florida; and WHEREAS, on October 19, 2017, state and local law enforcement agencies implemented a coordinated security plan to protect the health, safety, and welfare of the public and to safeguard public and private property; and WHEREAS, as a result of the diligent planning and careful execution of the coordinated security plan by state and local law enforcement, the University of Florida did not experience widespread episodes of violence -

2019-2020 State & Provincial Police Division Bi-Annual Report
2019-2020 BI-ANNUAL REPORT I NTERNAT I ONAL A SSOC I AT I ON OF C H I EFS OF P OL I CE 1 Table of Contents S&P Division Overview ...................................................................................................................................1 2019 Division Midyear ....................................................................................................................................1 2019 Regional Meetings ...............................................................................................................................2 2019 S&P Section Meetings .......................................................................................................................4 2019 State & Provincial Police Academy Directors Section Annual Conference ...............................................................................................................................4 2019 Crash Awareness Reduction Effort Section Conference .................................4 2019 State & Provincial Police Planning Officers Section Annual Meeting .....5 2019 IACP Annual Conference & Exposition ..................................................................................5 2019 State & Provincial Police Division Annual Meeting .........................................................6 2020 S&P Webinar Series ...........................................................................................................................6 2020 S&P Virtual Meetings ........................................................................................................................7 -

Law Enforcement and Traffic Safety
13 Law Enforcemenl and '.. •••:••'..••• , -^ •;;.-,:V • ' ••:••••.•• •..:•.••••-/••• •'•• ^^"- • THE STATEWIDE LAW ENFORCEMENT AGENCIES* X RIME repression and traffic law en In the field of crime repression and G forcement continue'to stand out as prevention ,.the load thrust upon the the two major responsibilities of state state ^enforcement agencies has been es-; law enforcement agencies, but the impact pecraily burdensome. Counted among of the War is evidenced in every phase the/newer and pressing responsibilities of their activities. In the field of motor during 1912 were the protection of in vehicle traffic, the war effort has required dustrial areas, combatting of subversive especial attention to such important activities, training of auxiliary personnel, problems as the movement of fnen and . and the maintenance of an ever watchful niatenals to and from war plants and eye over the rising tide of crime and supply depots, the escort of military cara juvenile delinquency.^ These and many vans, the planning of convoy routes, -the of motor vehicle equipment, the replacement study' of evacuation areas in the event' and repair of which becomes a critical problem of disaster, and the enforcement of the because of priorities and scarcity of materials. gasoline and tire rationing programs.' The above data was supplied through the cour Above all Iqomcd the critical problem tesy of the National Safety Council. 3 Xake the situation in West Virginia as an ex of combatting injuries, accidents and ample. During the biennium, July I. igjb-June deaths on the highways—a problem which 30, 1912, the state police travelled^ ' t.9% miles 'struck at the heart of the war effort.^ and enSployed 919 man hours in assisting selec tive service i)oards; 4,984 miles and .joG man 1 Attention directed to convoying of military hours in assisting sugar, and gasolincl rationing caravans is. -

District Six Prepares for Hurricane Irma Imize Disruptions to Operations
Florida Department of Transportation - District 6 Volume 10 • Issue 1 • October 2017 District Six Prepares for Hurricane Irma imize disruptions to operations. Due to the ini- tial forecasts showing an initial Category Five storm directly impacting Miami, TMC manage- ment developed a plan to temporarily relocate key staff to a remote facility for continuation of operations. They executed this plan as a pre- caution before Irma reached landfall in Mon- roe County as a Category Four. Essential staff traveled to the Florida’s Turnpike Enterprise TMC near Orlando to set up operations and avoid downtime once the Miami TMC closed. The combination of these steps allowed The District Six SunGuide Transportation The team reviewed this contingency plan the team to remain operational through- Management Center (TMC) activated and met daily to achieve this goal in the days out the storm and its aftermath. Traffic op- its Hurricane Response Action Plan before the storm. Key staff members from erators were able to monitor the roadways (HRAP) as Hurricane Irma made its way Operations, Maintenance, IT and Facilities went and dispatch incident management resourc- to Monroe and Miami-Dade counties. through a series of punch list items to secure es when conditions permitted. Staff served the preparedness of their respective sections. as the point of contact for partner agencies The goal of the HRAP is to ensure the and served as the conduit of information for continuity of the program’s traffic management IT tested the network’s redundancy capabili- the District’s Emergency Operations Cen- operations during and after a major storm. -

Timely, Dynamic, and Spatially Accurate Roadway Incident Information to Support Real-Time Management of Traffic Operations
Florida Department of Transportation FDOT Contract BDV31-977-111 Timely, Dynamic, and Spatially Accurate Roadway Incident Information to Support Real-Time Management of Traffic Operations Final Report Prepared by: University of Florida _____________________________________________________________ June 2020 i DISCLAIMER The opinions, findings, and conclusions expressed in this publication are those of the authors and not necessarily those of the State of Florida Department of Transportation. The contents of this report reflect the views of the authors, who are responsible for the facts and the accuracy of the information presented herein. This document is disseminated under the sponsorship of the U.S. Department of Transportation’s University Transportation Centers Program, in the interest of information exchange. The U.S. Government assumes no liability for the contents or use thereof. ii METRIC CONVERSION CHART SYMBOL WHEN YOU KNOW MULTIPLY BY TO FIND SYMBOL LENGTH in inches 25.4 millimeters mm ft feet 0.305 meters m yd yards 0.914 meters m mi miles 1.61 kilometers Km mm millimeters 0.039 inches in m meters 3.28 feet ft m meters 1.09 yards yd km kilometers 0.621 miles mi AREA in2 square inches 645.2 square millimeters mm2 ft2 square feet 0.093 square meters m2 yd2 square yard 0.836 square meters m2 ac acres 0.405 hectares ha mi2 square miles 2.59 square kilometers km2 mm2 square millimeters 0.0016 square inches in2 m2 square meters 10.764 square feet ft2 m2 square meters 1.195 square yards yd2 ha hectares 2.47 acres ac km2 square kilometers 0.386 square miles mi2 VOLUME fl oz fluid ounces 29.57 milliliters mL gal gallons 3.785 liters L ft3 cubic feet 0.028 cubic meters m3 yd3 cubic yards 0.765 cubic meters m3 mL milliliters 0.034 fluid ounces fl oz L liters 0.264 gallons gal m3 cubic meters 35.314 cubic feet ft3 m3 cubic meters 1.307 cubic yards yd3 NOTE: volumes greater than 1000 L shall be shown in m3 iii TECHNICAL REPORT DOCUMENTATION PAGE 1. -

FALL 2019 Farewell to Warden Edward L
QUARTERLY UPDATE CRIMINAL JUSTICE PROFESSIONALISM FALL 2019 Farewell To Warden Edward L. Griffin After over 34 years of devoted service to the Florida Department of Corrections, Warden Edward L. Griffin will retire on December 12, 2019. Warden Griffin began his criminal justice career with the Department on April 22, 1985, as a Correctional Officer at Zephyrhills Correctional Institution. Over the years, he has been promoted through the ranks and has served as Warden of the Hernando Correctional Institution in Brooksville, Florida, for the past 11 years. Warden Griffin was appointed to the Criminal Justice Standards and Training Commission on August 2, 2011, and reappointed by the Governor on August 2, 2015, serving on the 2016 Prejudicial Behavior Committee as well as the Officer Discipline Penalty Guidelines Task Force in 2015 and 2017. Warden Griffin was elected as vice-chair on August 7, 2014, and was elected to serve as Commission chair from August 10, 2017, to August 8, 2019. During his tenure with the Commission and the Florida Department of Corrections, Warden Griffin welcomed the opportunity to be a public servant for, not only for the Commission, but also for the citizens of the State of Florida, for whom he served. Warden Griffin stated “I never thought that I would have the opportunity to be an officer for this Commission. Being elected as Vice-Chairman, and then, Chairman, was indeed the epitome of my career.” The Commission congratulates Warden Griffin on his retirement and wishes him well in future endeavors. Florida Department of Law Enforcement CRIMINAL JUSTICE 2 CRIMINAL JUSTICE PROFESSIONALISM | FALL 2019 STANDARDS AND TRAINING QUARTERLY COMMISSION Deputy William “Willie” R.