Yocto and Iot a Retrospective
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

CNTR: Lightweight OS Containers
CNTR: Lightweight OS Containers Jorg¨ Thalheim, Pramod Bhatotia Pedro Fonseca Baris Kasikci University of Edinburgh University of Washington University of Michigan Abstract fundamental to achieve high efficiency in virtualized datacenters and enables important use-cases, namely Container-based virtualization has become the de-facto just-in-time deployment of applications. Moreover, standard for deploying applications in data centers. containers significantly reduce operational costs through However, deployed containers frequently include a higher consolidation density and power minimization, wide-range of tools (e.g., debuggers) that are not required especially in multi-tenant environments. Because of all for applications in the common use-case, but they these advantages, it is no surprise that containers have seen are included for rare occasions such as in-production wide-spread adoption by industry, in many cases replacing debugging. As a consequence, containers are significantly altogether traditional virtualization solutions [17]. larger than necessary for the common case, thus increasing the build and deployment time. Despite being lightweight, deployed containers often include a wide-range of tools such as shells, editors, CNTR1 provides the performance benefits of lightweight coreutils, and package managers. These additional tools containers and the functionality of large containers by are usually not required for the application’s core function splitting the traditional container image into two parts: the — the common operational use-case — but they are “fat” image — containing the tools, and the “slim” image included for management, manual inspection, profiling, — containing the main application. At run-time, CNTR and debugging purposes [64]. In practice, this significantly allows the user to efficiently deploy the “slim” image and increases container size and, in turn, translates into then expand it with additional tools, when and if necessary, slower container deployment and inefficient datacenter by dynamically attaching the “fat” image. -

RZ/G Verified Linux Package for 64Bit Kernel V1.0.5-RT Release Note For
Release Note RZ/G Verified Linux Package for 64bit kernel Version 1.0.5-RT R01TU0311EJ0102 Rev. 1.02 Release Note for HTML5 Sep 7, 2020 Introduction This release note describes the contents, building procedures for HTML5 (Gecko) and important points of the RZ/G Verified Linux Package for 64bit kernel (hereinafter referred to as “VLP64”). In this release, Linux packages for HTML5 is preliminary and provided AS IS with no warranty. If you need information to build Linux BSPs without a GUI Framework of HTML5, please refer to “RZ/G Verified Linux Package for 64bit kernel Version 1.0.5-RT Release Note”. Contents 1. Release Items ................................................................................................................. 2 2. Build environment .......................................................................................................... 4 3. Building Instructions ...................................................................................................... 6 3.1 Setup the Linux Host PC to build images ................................................................................. 6 3.2 Building images to run on the board ........................................................................................ 8 3.3 Building SDK ............................................................................................................................. 12 4. Components ................................................................................................................. 13 5. Restrictions -

Embedded Linux Systems with the Yocto Project™
OPEN SOURCE SOFTWARE DEVELOPMENT SERIES Embedded Linux Systems with the Yocto Project" FREE SAMPLE CHAPTER SHARE WITH OTHERS �f, � � � � Embedded Linux Systems with the Yocto ProjectTM This page intentionally left blank Embedded Linux Systems with the Yocto ProjectTM Rudolf J. Streif Boston • Columbus • Indianapolis • New York • San Francisco • Amsterdam • Cape Town Dubai • London • Madrid • Milan • Munich • Paris • Montreal • Toronto • Delhi • Mexico City São Paulo • Sidney • Hong Kong • Seoul • Singapore • Taipei • Tokyo Many of the designations used by manufacturers and sellers to distinguish their products are claimed as trademarks. Where those designations appear in this book, and the publisher was aware of a trademark claim, the designations have been printed with initial capital letters or in all capitals. The author and publisher have taken care in the preparation of this book, but make no expressed or implied warranty of any kind and assume no responsibility for errors or omissions. No liability is assumed for incidental or consequential damages in connection with or arising out of the use of the information or programs contained herein. For information about buying this title in bulk quantities, or for special sales opportunities (which may include electronic versions; custom cover designs; and content particular to your business, training goals, marketing focus, or branding interests), please contact our corporate sales depart- ment at [email protected] or (800) 382-3419. For government sales inquiries, please contact [email protected]. For questions about sales outside the U.S., please contact [email protected]. Visit us on the Web: informit.com Cataloging-in-Publication Data is on file with the Library of Congress. -
Riscv-Software-Stack-Tutorial-Hpca2015
Software Tools Bootcamp RISC-V ISA Tutorial — HPCA-21 08 February 2015 Albert Ou UC Berkeley [email protected] Preliminaries To follow along, download these slides at http://riscv.org/tutorial-hpca2015.html 2 Preliminaries . Shell commands are prefixed by a “$” prompt. Due to time constraints, we will not be building everything from source in real-time. - Binaries have been prepared for you in the VM image. - Detailed build steps are documented here for completeness but are not necessary if using the VM. Interactive portions of this tutorial are denoted with: $ echo 'Hello world' . Also as a reminder, these slides are marked with an icon in the upper-right corner: 3 Software Stack . Many possible combinations (and growing) . But here we will focus on the most common workflows for RISC-V software development 4 Agenda 1. riscv-tools infrastructure 2. First Steps 3. Spike + Proxy Kernel 4. QEMU + Linux 5. Advanced Cross-Compiling 6. Yocto/OpenEmbedded 5 riscv-tools — Overview “Meta-repository” with Git submodules for every stable component of the RISC-V software toolchain Submodule Contents riscv-fesvr RISC-V Frontend Server riscv-isa-sim Functional ISA simulator (“Spike”) riscv-qemu Higher-performance ISA simulator riscv-gnu-toolchain binutils, gcc, newlib, glibc, Linux UAPI headers riscv-llvm LLVM, riscv-clang submodule riscv-pk RISC-V Proxy Kernel (riscv-linux) Linux/RISC-V kernel port riscv-tests ISA assembly tests, benchmark suite All listed submodules are hosted under the riscv GitHub organization: https://github.com/riscv 6 riscv-tools — Installation . Build riscv-gnu-toolchain (riscv*-*-elf / newlib target), riscv-fesvr, riscv-isa-sim, and riscv-pk: (pre-installed in VM) $ git clone https://github.com/riscv/riscv-tools $ cd riscv-tools $ git submodule update --init --recursive $ export RISCV=<installation path> $ export PATH=${PATH}:${RISCV}/bin $ ./build.sh . -

Securing Embedded Systems: Analyses of Modern Automotive Systems and Enabling Near-Real Time Dynamic Analysis
Securing Embedded Systems: Analyses of Modern Automotive Systems and Enabling Near-Real Time Dynamic Analysis Karl Koscher A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy University of Washington 2014 Reading Committee: Tadayoshi Kohno, Chair Gaetano Borriello Shwetak Patel Program Authorized to Offer Degree: Computer Science and Engineering © Copyright 2014 Karl Koscher University of Washington Abstract Securing Embedded Systems: From Analyses of Modern Automotive Systems to Enabling Dynamic Analysis Karl Koscher Chair of the Supervisory Committee: Associate Professor Tadayoshi Kohno Department of Computer Science and Engineering Today, our life is pervaded by computer systems embedded inside everyday products. These embedded systems are found in everything from cars to microwave ovens. These systems are becoming increasingly sophisticated and interconnected, both to each other and to the Internet. Unfortunately, it appears that the security implications of this complexity and connectivity have mostly been overlooked, even though ignoring security could have disastrous consequences; since embedded systems control much of our environment, compromised systems could be used to inflict physical harm. This work presents an analysis of security issues in embedded systems, including a comprehensive security analysis of modern automotive systems. We hypothesize that dynamic analysis tools would quickly discover many of the vulnerabilities we found. However, as we will discuss, there -

Continuous Integration and Testing of a Yocto Project Based Automotive Head Unit
CONTINUOUS INTEGRATION AND TESTING OF A YOCTO PROJECT BASED AUTOMOTIVE HEAD UNIT MARIO DOMENECH GOULART MIKKO RAPELI Embedded Linux Conference Europe 2016 ABOUT BMW CAR IT GMBH Founded in 2001 as a wholly owned subsidiary of the BMW AG Strengthen BMW's software competence View vehicles as software systems Develop innovative software for future BMW Group vehicles Prototype solutions for early and reliable project decisions Participate in several open-source communities and research projects Embedded Linux Conference Europe 2016 Page 2 CARS AND HEAD UNITS Embedded Linux Conference Europe 2016 Page 3 PROJECT SETUP Development of a head unit for BMW cars A connected multimedia computer with navigation and telephony Several companies, physically distributed Hundreds of developers, on various levels Complex infrastructure Technical and political obstacles to set up technical solutions Embedded Linux Conference Europe 2016 Page 4 CI SYSTEM REQUIREMENTS Provide fast feedback for developers, integrators, project organization Automatic multi-stage CI Software components change-verification in an SDK environment Build components Execute unit tests Software integration change-verification in the system build Build the full system, for all targets, all images Quality assurance checks after build Build Acceptance Testing (BAT) on real target environments (hardware, SDK) Embedded Linux Conference Europe 2016 Page 5 QUICK OVERVIEW OF YOCTO PROJECT Linux-based cross-compilation framework Set of metadata and a task scheduler which, -

Root Filesystem
>>> Operating Systems And Applications For Embedded Systems >>> Root Filesystem Name: Mariusz Naumowicz Date: 27 sierpnia 2018 [~]$ _ [1/21] >>> Plan 1. Root Filesystem Useful System Filesystem Hierarchy Standard (FHS) Staging directory 2. Programs The init program Shell Utilities BusyBox ToyBox Libraries Reducing size by stripping Device nodes The proc and sysfs flesystems Mounting flesystems Additional reading Standalone ramdisk Minimizing size Booting with QEMU Additional reading [~]$ _ [2/21] >>> Useful System * init: The program that starts everything off, usually by running a series of scripts. * shell: Needed to give you a command prompt but, more importantly, to run the shell scripts called by init and other programs. * daemons: Various server programs, started by init. * libraries: Usually, the programs mentioned so far are linked with shared libraries which must be present in the root filesystem. * Configuration files: The configuration for init and other daemons is stored in a series of ASCII text files, usually in the /etc directory. * Device nodes: The special files that give access to various device drivers. * /proc and /sys: Two pseudo filesystems that represent kernel data structures as a hierarchy of directories and files. Many programs and library functions read these files. * kernel modules: If you have configured some parts of your kernel to be modules, they will be here, usually in /lib/modules/[kernel version]. [1. Root Filesystem]$ _ [3/21] >>> Filesystem Hierarchy Standard (FHS) * /bin: programs essential for all -

Yocto-Slides.Pdf
Yocto Project and OpenEmbedded Training Yocto Project and OpenEmbedded Training © Copyright 2004-2021, Bootlin. Creative Commons BY-SA 3.0 license. Latest update: October 6, 2021. Document updates and sources: https://bootlin.com/doc/training/yocto Corrections, suggestions, contributions and translations are welcome! embedded Linux and kernel engineering Send them to [email protected] - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 1/296 Rights to copy © Copyright 2004-2021, Bootlin License: Creative Commons Attribution - Share Alike 3.0 https://creativecommons.org/licenses/by-sa/3.0/legalcode You are free: I to copy, distribute, display, and perform the work I to make derivative works I to make commercial use of the work Under the following conditions: I Attribution. You must give the original author credit. I Share Alike. If you alter, transform, or build upon this work, you may distribute the resulting work only under a license identical to this one. I For any reuse or distribution, you must make clear to others the license terms of this work. I Any of these conditions can be waived if you get permission from the copyright holder. Your fair use and other rights are in no way affected by the above. Document sources: https://github.com/bootlin/training-materials/ - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 2/296 Hyperlinks in the document There are many hyperlinks in the document I Regular hyperlinks: https://kernel.org/ I Kernel documentation links: dev-tools/kasan I Links to kernel source files and directories: drivers/input/ include/linux/fb.h I Links to the declarations, definitions and instances of kernel symbols (functions, types, data, structures): platform_get_irq() GFP_KERNEL struct file_operations - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 3/296 Company at a glance I Engineering company created in 2004, named ”Free Electrons” until Feb. -
MANAGING a REAL-TIME EMBEDDED LINUX PLATFORM with BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510
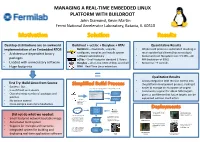
MANAGING A REAL-TIME EMBEDDED LINUX PLATFORM WITH BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510 Desktop distributions are an awkward Buildroot + ucLibc + Busybox + RTAI Quantitative Results implementation of an Embedded RTOS Buildroot – downloads, unpacks, • Whole build process is automated resulting in • Architecture-dependent binary configures, compiles and installs system much quicker build times (hours not days) software automatically • Kernel and root filesystem size: 3.5 MB – 20 packages uClibc – Small-footprint standard C library MB (reduction of 99%) • Loaded with unnecessary software Busybox – all-in-one UNIX utilities and shell • Boot-time: ~9 seconds • Huge footprints RTAI – Real-Time Linux extensions = Qualitative Results • Allows integration with revision control into First Try: Build Linux from Source the platform development process, making it • Success! But.. 2. Buildroot’s menuconfig generates a package configuration file easier to manage an ecosystem of targets • Is as difficult as it sounds and kernel configuration file • Community support for x86 & ARM targets Linux Kernel • Overwhelming number of packages and Configuration gives us confidence that future targets can be patches Package supported without much effort 1. Developer Configuration • No version control configures build via Buildroot’s • Cross-compile even more headaches menuconfig Internet Build Process Power Supply Control Quench Protection Git / CVS / SVN and Regulation for the System for Tevatron Did not do what we needed: Fermilab Linac Electron Lens (TEL II) 3. The build process pulls 4. The output from the software packages from build process is a kernel • Small-footprint network bootable image the internet and custom bzImage bzImage file with an softare packages from a integrated root filesystem ARM Cortex A-9 source code repository file PC/104 AMD • Automated build system Geode SBC Beam Position Monitor Power Supply Control prototype for Fermilab and Regulation for • Support for multiple architectures 5. -

Cross-Compiler Bipartite Vulnerability Search
electronics Article Cross-Compiler Bipartite Vulnerability Search Paul Black * and Iqbal Gondal Internet Commerce Security Laboratory (ICSL), Federation University, Ballarat 3353, Australia; [email protected] * Correspondence: [email protected] Abstract: Open-source libraries are widely used in software development, and the functions from these libraries may contain security vulnerabilities that can provide gateways for attackers. This paper provides a function similarity technique to identify vulnerable functions in compiled programs and proposes a new technique called Cross-Compiler Bipartite Vulnerability Search (CCBVS). CCBVS uses a novel training process, and bipartite matching to filter SVM model false positives to improve the quality of similar function identification. This research uses debug symbols in programs compiled from open-source software products to generate the ground truth. This automatic extraction of ground truth allows experimentation with a wide range of programs. The results presented in the paper show that an SVM model trained on a wide variety of programs compiled for Windows and Linux, x86 and Intel 64 architectures can be used to predict function similarity and that the use of bipartite matching substantially improves the function similarity matching performance. Keywords: malware similarity; function similarity; binary similarity; machine-learning; bipar- tite matching 1. Introduction Citation: Black, P.; Gondal, I. Cross-Compiler Bipartite Function similarity techniques are used in the following activities, the triage of mal- Vulnerability Search. Electronics 2021, ware [1], analysis of program patches [2], identification of library functions [3], analysis of 10, 1356. https://doi.org/10.3390/ code authorship [4], the identification of similar function pairs to reduce manual analysis electronics10111356 workload, [5], plagiarism analysis [6], and for vulnerable function identification [7–9]. -
With Yocto/Openembedded
PORTING NEW CODE TO RISC-V WITH YOCTO/OPENEMBEDDED Martin Maas ([email protected]) 1st RISC-V Workshop, January 15, 2015 Monterey, CA WHY WE NEED A LINUX DISTRIBUTION • To build an application for RISC-V, you need to: – Download and build the RISC-V toolchain + Linux – Download, patch and build application + dependencies – Create an image and run it in QEMU or on hardware • Problems with this approach: – Error-prone: Easy to corrupt FS or get a step wrong – Reproducibility: Others can’t easily reuse your work – Rigidity: If a dependency changes, need to do it all over • We need a Linux distribution! – Automatic build process with dependency tracking – Ability to distribute binary packages and SDKs 2 RISCV-POKY: A PORT OF THE YOCTO PROJECT • We ported the Yocto Project – Official Linux Foundation Workgroup, supported by a large number of industry partners – Part I: Collection of hundreds of recipes (scripts that describe how to build packages for different platforms), shared with OpenEmbedded project – Part II: Bitbake, a parallel build system that takes recipes and fetches, patches, cross-compiles and produces packages (RPM/DEB), images, SDKs, etc. • Focus on build process and customizability 3 GETTING STARTED WITH RISCV-POKY • Let’s build a full Linux system including the GCC toolchain, Linux, QEMU + a large set of packages (including bash, ssh, python, perl, apt, wget,…) • Step I: Clone riscv-poky: git clone [email protected]:ucb-bar/riscv-poky.git • Step II: Set up the build system: source oe-init-build-env • Step III: Build an image (may -

Fpm Documentation Release 1.7.0
fpm Documentation Release 1.7.0 Jordan Sissel Sep 08, 2017 Contents 1 Backstory 3 2 The Solution - FPM 5 3 Things that should work 7 4 Table of Contents 9 4.1 What is FPM?..............................................9 4.2 Installation................................................ 10 4.3 Use Cases................................................. 11 4.4 Packages................................................. 13 4.5 Want to contribute? Or need help?.................................... 21 4.6 Release Notes and Change Log..................................... 22 i ii fpm Documentation, Release 1.7.0 Note: The documentation here is a work-in-progress. If you want to contribute new docs or report problems, I invite you to do so on the project issue tracker. The goal of fpm is to make it easy and quick to build packages such as rpms, debs, OSX packages, etc. fpm, as a project, exists with the following principles in mind: • If fpm is not helping you make packages easily, then there is a bug in fpm. • If you are having a bad time with fpm, then there is a bug in fpm. • If the documentation is confusing, then this is a bug in fpm. If there is a bug in fpm, then we can work together to fix it. If you wish to report a bug/problem/whatever, I welcome you to do on the project issue tracker. You can find out how to use fpm in the documentation. Contents 1 fpm Documentation, Release 1.7.0 2 Contents CHAPTER 1 Backstory Sometimes packaging is done wrong (because you can’t do it right for all situations), but small tweaks can fix it.