Eindhoven University of Technology BACHELOR Bamboozle Structures
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

7 LATTICE POINTS and LATTICE POLYTOPES Alexander Barvinok
7 LATTICE POINTS AND LATTICE POLYTOPES Alexander Barvinok INTRODUCTION Lattice polytopes arise naturally in algebraic geometry, analysis, combinatorics, computer science, number theory, optimization, probability and representation the- ory. They possess a rich structure arising from the interaction of algebraic, convex, analytic, and combinatorial properties. In this chapter, we concentrate on the the- ory of lattice polytopes and only sketch their numerous applications. We briefly discuss their role in optimization and polyhedral combinatorics (Section 7.1). In Section 7.2 we discuss the decision problem, the problem of finding whether a given polytope contains a lattice point. In Section 7.3 we address the counting problem, the problem of counting all lattice points in a given polytope. The asymptotic problem (Section 7.4) explores the behavior of the number of lattice points in a varying polytope (for example, if a dilation is applied to the polytope). Finally, in Section 7.5 we discuss problems with quantifiers. These problems are natural generalizations of the decision and counting problems. Whenever appropriate we address algorithmic issues. For general references in the area of computational complexity/algorithms see [AB09]. We summarize the computational complexity status of our problems in Table 7.0.1. TABLE 7.0.1 Computational complexity of basic problems. PROBLEM NAME BOUNDED DIMENSION UNBOUNDED DIMENSION Decision problem polynomial NP-hard Counting problem polynomial #P-hard Asymptotic problem polynomial #P-hard∗ Problems with quantifiers unknown; polynomial for ∀∃ ∗∗ NP-hard ∗ in bounded codimension, reduces polynomially to volume computation ∗∗ with no quantifier alternation, polynomial time 7.1 INTEGRAL POLYTOPES IN POLYHEDRAL COMBINATORICS We describe some combinatorial and computational properties of integral polytopes. -

On the Archimedean Or Semiregular Polyhedra
ON THE ARCHIMEDEAN OR SEMIREGULAR POLYHEDRA Mark B. Villarino Depto. de Matem´atica, Universidad de Costa Rica, 2060 San Jos´e, Costa Rica May 11, 2005 Abstract We prove that there are thirteen Archimedean/semiregular polyhedra by using Euler’s polyhedral formula. Contents 1 Introduction 2 1.1 RegularPolyhedra .............................. 2 1.2 Archimedean/semiregular polyhedra . ..... 2 2 Proof techniques 3 2.1 Euclid’s proof for regular polyhedra . ..... 3 2.2 Euler’s polyhedral formula for regular polyhedra . ......... 4 2.3 ProofsofArchimedes’theorem. .. 4 3 Three lemmas 5 3.1 Lemma1.................................... 5 3.2 Lemma2.................................... 6 3.3 Lemma3.................................... 7 4 Topological Proof of Archimedes’ theorem 8 arXiv:math/0505488v1 [math.GT] 24 May 2005 4.1 Case1: fivefacesmeetatavertex: r=5. .. 8 4.1.1 At least one face is a triangle: p1 =3................ 8 4.1.2 All faces have at least four sides: p1 > 4 .............. 9 4.2 Case2: fourfacesmeetatavertex: r=4 . .. 10 4.2.1 At least one face is a triangle: p1 =3................ 10 4.2.2 All faces have at least four sides: p1 > 4 .............. 11 4.3 Case3: threefacesmeetatavertes: r=3 . ... 11 4.3.1 At least one face is a triangle: p1 =3................ 11 4.3.2 All faces have at least four sides and one exactly four sides: p1 =4 6 p2 6 p3. 12 4.3.3 All faces have at least five sides and one exactly five sides: p1 =5 6 p2 6 p3 13 1 5 Summary of our results 13 6 Final remarks 14 1 Introduction 1.1 Regular Polyhedra A polyhedron may be intuitively conceived as a “solid figure” bounded by plane faces and straight line edges so arranged that every edge joins exactly two (no more, no less) vertices and is a common side of two faces. -

1 Lifts of Polytopes
Lecture 5: Lifts of polytopes and non-negative rank CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Lifts of polytopes 1.1 Polytopes and inequalities Recall that the convex hull of a subset X n is defined by ⊆ conv X λx + 1 λ x0 : x; x0 X; λ 0; 1 : ( ) f ( − ) 2 2 [ ]g A d-dimensional convex polytope P d is the convex hull of a finite set of points in d: ⊆ P conv x1;:::; xk (f g) d for some x1;:::; xk . 2 Every polytope has a dual representation: It is a closed and bounded set defined by a family of linear inequalities P x d : Ax 6 b f 2 g for some matrix A m d. 2 × Let us define a measure of complexity for P: Define γ P to be the smallest number m such that for some C s d ; y s ; A m d ; b m, we have ( ) 2 × 2 2 × 2 P x d : Cx y and Ax 6 b : f 2 g In other words, this is the minimum number of inequalities needed to describe P. If P is full- dimensional, then this is precisely the number of facets of P (a facet is a maximal proper face of P). Thinking of γ P as a measure of complexity makes sense from the point of view of optimization: Interior point( methods) can efficiently optimize linear functions over P (to arbitrary accuracy) in time that is polynomial in γ P . ( ) 1.2 Lifts of polytopes Many simple polytopes require a large number of inequalities to describe. -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -

Semi-Regular Tilings of the Hyperbolic Plane
SEMI-REGULAR TILINGS OF THE HYPERBOLIC PLANE BASUDEB DATTA AND SUBHOJOY GUPTA Abstract. A semi-regular tiling of the hyperbolic plane is a tessellation by regular geodesic polygons with the property that each vertex has the same vertex-type, which is a cyclic tuple of integers that determine the number of sides of the polygons surrounding the vertex. We determine combinatorial criteria for the existence, and uniqueness, of a semi-regular tiling with a given vertex-type, and pose some open questions. 1. Introduction A tiling of a surface is a partition into (topological) polygons (the tiles) which are non- overlapping (interiors are disjoint) and such that tiles which touch, do so either at exactly one vertex, or along exactly one common edge. The vertex-type of a vertex v is a cyclic tuple of integers [k1; k2;:::; kd] where d is the degree (or valence) of v, and each ki (for 1 i d) is the number of sides (the size) of the i-th polygon around v, in either clockwise or≤ counter-clockwise≤ order. A semi-regular tiling on a surface of constant curvature (eg., the round sphere, the Euclidean plane or the hyperbolic plane) is one in which each polygon is regular, each edge is a geodesic, and the vertex-type is identical for each vertex (see Figure 1). Two tilings are equivalent if they are combinatorially isomorphic, that is, there is a homeomorphism of the surface to itself that takes vertices, edges and tiles of one tiling to those of the other. In fact, two semi-regular tilings of the hyperbolic plane are equivalent if and only if there is an isometry of the hyperbolic plane that realizes the combinatorial isomorphism between them (see Lemma 2.5). -

Electronic Reprint a Coloring-Book Approach to Finding Coordination
electronic reprint ISSN: 2053-2733 journals.iucr.org/a A coloring-book approach to finding coordination sequences C. Goodman-Strauss and N. J. A. Sloane Acta Cryst. (2019). A75, 121–134 IUCr Journals CRYSTALLOGRAPHY JOURNALS ONLINE Copyright c International Union of Crystallography Author(s) of this paper may load this reprint on their own web site or institutional repository provided that this cover page is retained. Republication of this article or its storage in electronic databases other than as specified above is not permitted without prior permission in writing from the IUCr. For further information see http://journals.iucr.org/services/authorrights.html Acta Cryst. (2019). A75, 121–134 Goodman-Strauss and Sloane · Finding coordination sequences research papers A coloring-book approach to finding coordination sequences ISSN 2053-2733 C. Goodman-Straussa and N. J. A. Sloaneb* aDepartment of Mathematical Sciences, University of Arkansas, Fayetteville, AR 72701, USA, and bThe OEIS Foundation Inc., 11 So. Adelaide Ave., Highland Park, NJ 08904, USA. *Correspondence e-mail: [email protected] Received 30 May 2018 Accepted 14 October 2018 An elementary method is described for finding the coordination sequences for a tiling, based on coloring the underlying graph. The first application is to the two kinds of vertices (tetravalent and trivalent) in the Cairo (or dual-32.4.3.4) tiling. Edited by J.-G. Eon, Universidade Federal do Rio The coordination sequence for a tetravalent vertex turns out, surprisingly, to be de Janeiro, Brazil 1, 4, 8, 12, 16, ..., the same as for a vertex in the familiar square (or 44) tiling. -

Year 6 – Wednesday 24Th June 2020 – Maths
1 Year 6 – Wednesday 24th June 2020 – Maths Can I identify 3D shapes that have pairs of parallel or perpendicular edges? Parallel – edges that have the same distance continuously between them – parallel edges never meet. Perpendicular – when two edges or faces meet and create a 90o angle. 1 4. 7. 10. 2 5. 8. 11. 3. 6. 9. 12. C1 – Using the shapes above: 1. Name and sort the shapes into: a. Pyramids b. Prisms 2. Draw a table to identify how many faces, edges and vertices each shape has. 3. Write your own geometric definition: a. Prism b. pyramid 4. Which shape is the odd one out? Explain why. C2 – Using the shapes above; 1. Which of the shapes have pairs of parallel edges in: a. All their faces? b. More than one half of the faces? c. One face only? 2. The following shapes have pairs of perpendicular edges. Identify the faces they are in: 2 a. A cube b. A square based pyramid c. A triangular prism d. A cuboid 3. Which shape with straight edges has no perpendicular edges? 4. Which shape has perpendicular edges in the shape but not in any face? C3 – Using the above shapes: 1. How many faces have pairs of parallel edges in: a. A hexagonal pyramid? b. A decagonal (10-sided) based prism? c. A heptagonal based prism? d. Which shape has no face with parallel edges but has parallel edges in the shape? 2. How many faces have perpendicular edges in: a. A pentagonal pyramid b. A hexagonal pyramid c. -

Can Every Face of a Polyhedron Have Many Sides ?
Can Every Face of a Polyhedron Have Many Sides ? Branko Grünbaum Dedicated to Joe Malkevitch, an old friend and colleague, who was always partial to polyhedra Abstract. The simple question of the title has many different answers, depending on the kinds of faces we are willing to consider, on the types of polyhedra we admit, and on the symmetries we require. Known results and open problems about this topic are presented. The main classes of objects considered here are the following, listed in increasing generality: Faces: convex n-gons, starshaped n-gons, simple n-gons –– for n ≥ 3. Polyhedra (in Euclidean 3-dimensional space): convex polyhedra, starshaped polyhedra, acoptic polyhedra, polyhedra with selfintersections. Symmetry properties of polyhedra P: Isohedron –– all faces of P in one orbit under the group of symmetries of P; monohedron –– all faces of P are mutually congru- ent; ekahedron –– all faces have of P the same number of sides (eka –– Sanskrit for "one"). If the number of sides is k, we shall use (k)-isohedron, (k)-monohedron, and (k)- ekahedron, as appropriate. We shall first describe the results that either can be found in the literature, or ob- tained by slight modifications of these. Then we shall show how two systematic ap- proaches can be used to obtain results that are better –– although in some cases less visu- ally attractive than the old ones. There are many possible combinations of these classes of faces, polyhedra and symmetries, but considerable reductions in their number are possible; we start with one of these, which is well known even if it is hard to give specific references for precisely the assertion of Theorem 1. -
Unit 6 Visualising Solid Shapes(Final)
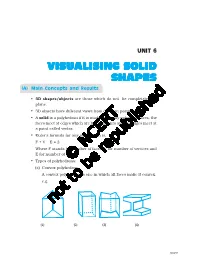
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

A Tourist Guide to the RCSR
A tourist guide to the RCSR Some of the sights, curiosities, and little-visited by-ways Michael O'Keeffe, Arizona State University RCSR is a Reticular Chemistry Structure Resource available at http://rcsr.net. It is open every day of the year, 24 hours a day, and admission is free. It consists of data for polyhedra and 2-periodic and 3-periodic structures (nets). Visitors unfamiliar with the resource are urged to read the "about" link first. This guide assumes you have. The guide is designed to draw attention to some of the attractions therein. If they sound particularly attractive please visit them. It can be a nice way to spend a rainy Sunday afternoon. OKH refers to M. O'Keeffe & B. G. Hyde. Crystal Structures I: Patterns and Symmetry. Mineral. Soc. Am. 1966. This is out of print but due as a Dover reprint 2019. POLYHEDRA Read the "about" for hints on how to use the polyhedron data to make accurate drawings of polyhedra using crystal drawing programs such as CrystalMaker (see "links" for that program). Note that they are Cartesian coordinates for (roughly) equal edge. To make the drawing with unit edge set the unit cell edges to all 10 and divide the coordinates given by 10. There seems to be no generally-agreed best embedding for complex polyhedra. It is generally not possible to have equal edge, vertices on a sphere and planar faces. Keywords used in the search include: Simple. Each vertex is trivalent (three edges meet at each vertex) Simplicial. Each face is a triangle. -

How Platonic and Archimedean Solids Define Natural Equilibria of Forces for Tensegrity
How Platonic and Archimedean Solids Define Natural Equilibria of Forces for Tensegrity Martin Friedrich Eichenauer The Platonic and Archimedean solids are a well-known vehicle to describe Research Assistant certain phenomena of our surrounding world. It can be stated that they Technical University Dresden define natural equilibria of forces, which can be clarified particularly Faculty of Mathematics Institute of Geometry through the packing of spheres. [1][2] To solve the problem of the densest Germany packing, both geometrical and mechanical approach can be exploited. The mechanical approach works on the principle of minimal potential energy Daniel Lordick whereas the geometrical approach searches for the minimal distances of Professor centers of mass. The vertices of the solids are given by the centers of the Technical University Dresden spheres. Faculty of Geometry Institute of Geometry If we expand this idea by a contrary force, which pushes outwards, we Germany obtain the principle of tensegrity. We can show that we can build up regular and half-regular polyhedra by the interaction of physical forces. Every platonic and Archimedean solid can be converted into a tensegrity structure. Following this, a vast variety of shapes defined by multiple solids can also be obtained. Keywords: Platonic Solids, Archimedean Solids, Tensegrity, Force Density Method, Packing of Spheres, Modularization 1. PLATONIC AND ARCHIMEDEAN SOLIDS called “kissing number” problem. The kissing number problem is asking for the maximum possible number of Platonic and Archimedean solids have systematically congruent spheres, which touch another sphere of the been described in the antiquity. They denominate all same size without overlapping. In three dimensions the convex polyhedra with regular faces and uniform vertices kissing number is 12. -

Fundamental Principles Governing the Patterning of Polyhedra
FUNDAMENTAL PRINCIPLES GOVERNING THE PATTERNING OF POLYHEDRA B.G. Thomas and M.A. Hann School of Design, University of Leeds, Leeds LS2 9JT, UK. [email protected] ABSTRACT: This paper is concerned with the regular patterning (or tiling) of the five regular polyhedra (known as the Platonic solids). The symmetries of the seventeen classes of regularly repeating patterns are considered, and those pattern classes that are capable of tiling each solid are identified. Based largely on considering the symmetry characteristics of both the pattern and the solid, a first step is made towards generating a series of rules governing the regular tiling of three-dimensional objects. Key words: symmetry, tilings, polyhedra 1. INTRODUCTION A polyhedron has been defined by Coxeter as “a finite, connected set of plane polygons, such that every side of each polygon belongs also to just one other polygon, with the provision that the polygons surrounding each vertex form a single circuit” (Coxeter, 1948, p.4). The polygons that join to form polyhedra are called faces, 1 these faces meet at edges, and edges come together at vertices. The polyhedron forms a single closed surface, dissecting space into two regions, the interior, which is finite, and the exterior that is infinite (Coxeter, 1948, p.5). The regularity of polyhedra involves regular faces, equally surrounded vertices and equal solid angles (Coxeter, 1948, p.16). Under these conditions, there are nine regular polyhedra, five being the convex Platonic solids and four being the concave Kepler-Poinsot solids. The term regular polyhedron is often used to refer only to the Platonic solids (Cromwell, 1997, p.53).