Colour Evolution of Rosé Wines After Bottling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A to Z Glossary of Wine Terms
A to Z Glossary of Wine Terms A ABV (Alcohol by Volume) - A measure of the alcohol concentration of a wine, usually expressed as a percentage. Acidic - A tart, sour, or fresh feeling in the mouth when you taste the wine. Aeration - Adding oxygen to the wine to soften tannins. Aggressive – Wine tasting term describing a wine that is either too tannic, too acidic, or a combina- tion of both. Alcohol - Ethanol; in wine it is produced via fermentation with yeast and sugar. Alcoholic – Wine tasting term indicating high alcohol. A wine with a noticeably high alcohol con- tent; perceived as a hotness in the wine. Angular – Wine tasting term used to describe young wines that display predominately sharp, bitter, or tart flavor characteristics. AOC (Appellation d’origine contrôlée) - A term in the French wine designation system which means “controlled designation of origin.” It identifies the location or region where a wine is made. Appearance - In general, the term appearance is used to describe the clarity of a wine. Appellation - A designated wine growing area governed by specific rules regarding the wine grapes grown and wine produced in the specific appellation areas. Aroma - A wine’s scent characteristics; very closely tied in with the flavors. Aromatic - Varieties of grapes that have especially noticeable aromas. Some aromatic grapes in- clude Viognier, Torrontés, Gewürztraminer, Riesling, Muscat, and Pinot Gris. Aromatized – A wine that is infused with botanicals. Vermouth is an aromatized wine. Assemblage - A method of blending wine before bottling. Astringent – A wine tasting term meaning the wine leaves the mouth feeling overwhelmingly dry. -

Phenolic Compounds As Markers of Wine Quality and Authenticity
foods Review Phenolic Compounds as Markers of Wine Quality and Authenticity Vakare˙ Merkyte˙ 1,2 , Edoardo Longo 1,2,* , Giulia Windisch 1,2 and Emanuele Boselli 1,2 1 Faculty of Science and Technology, Free University of Bozen-Bolzano, Piazza Università 5, 39100 Bozen-Bolzano, Italy; [email protected] (V.M.); [email protected] (G.W.); [email protected] (E.B.) 2 Oenolab, NOI Techpark South Tyrol, Via A. Volta 13B, 39100 Bozen-Bolzano, Italy * Correspondence: [email protected]; Tel.: +39-0471-017691 Received: 29 October 2020; Accepted: 28 November 2020; Published: 1 December 2020 Abstract: Targeted and untargeted determinations are being currently applied to different classes of natural phenolics to develop an integrated approach aimed at ensuring compliance to regulatory prescriptions related to specific quality parameters of wine production. The regulations are particularly severe for wine and include various aspects of the viticulture practices and winemaking techniques. Nevertheless, the use of phenolic profiles for quality control is still fragmented and incomplete, even if they are a promising tool for quality evaluation. Only a few methods have been already validated and widely applied, and an integrated approach is in fact still missing because of the complex dependence of the chemical profile of wine on many viticultural and enological factors, which have not been clarified yet. For example, there is a lack of studies about the phenolic composition in relation to the wine authenticity of white and especially rosé wines. This review is a bibliographic account on the approaches based on phenolic species that have been developed for the evaluation of wine quality and frauds, from the grape varieties (of V. -

Irrigation and Leaf Removal Effects on Polyphenolic Content of Grapes and Wines Produced from Cv
Available online: www.notulaebotanicae.ro Print ISSN 0255-965X; Electronic 1842-4309 Not Bot Horti Agrobo, 2016, 44(1):133-139. DOI:10.15835/nbha44110254 Original Article Irrigation and Leaf Removal Effects on Polyphenolic Content of Grapes and Wines Produced from cv. ‘Agiorgitiko’ (Vitis vinifera L.) Evangelia CHORTI1, Maria KYRALEOU2, Stamatina KALLITHRAKA2, Manolis PAVLIDIS2, Stefanos KOUNDOURAS3, Ioannis KANAKIS4, Yorgos KOTSERIDIS2* 1Cooperative Winery of Nemea, 130 Papaconstantinou av., 20500 Nemea, Greece; [email protected] 2Agricultural University of Athens, Department of Food Science & Technology, 75 Iera Odos, 11855 Athens, Greece ; [email protected]; [email protected]; [email protected]; [email protected] (*corresponding author) 3Aristotle University of Thessaloniki, School of Agriculture, Laboratory of Viticulture, 54124, Thessaloniki, Greece; [email protected] 4Fassoulis Grapevine Nurseries, 20500 Leontio - Nemea, Greece; [email protected] Abstract Vitis vinifera L. cv. ‘Agiorgitiko’ is one of the most important red grape varieties of Greece, cultivated almost exclusively in the region of Nemea in north-eastern Peloponnese. This work aimed to study the influence of some commonly applied viticultural practices on the polyphenolic composition of ‘Agiorgitiko’. Leaf removal at veraison, irrigation, and a combination of both, were applied and the phenolic content of the grapes and of the produced wines was compared. The results showed that leaf removal decreased berry size, enhanced total anthocyanin, total phenol and malvidin 3-O-monoglucoside accumulation in skins and increased the amount of extractable anthocyanins in the juice. The combination of irrigation and leaf removal caused a significant increase in total phenols in the skin and in the amount of extractable anthocyanins in juice. -

The Effect of Grape Ripening Stage on Red Wine Color
THE EFFECT OF GRAPE RIPENING STAGE ON RED WINE COLOR EFFET DE LA MATURATION SUR LA COULEUR DES VINS ROUGES A.B. BAUTISTA-ORTÍN1, J.I. FERNÁNDEZ-FERNÁNDEZ2, J.M. LÓPEZ-ROCA1 and E. GÓMEZ-PLAZA*1 1 : Departamento de Tecnología de Alimentos, Nutrición y Bromatología, Facultad de Veterinaria, Universidad de Murcia. Campus de Espinardo, 30071 Murcia, Espagne 2 : I.M.I.D.A. Ctra. La Alberca s/n, 30150 Murcia, Espagne Abstract : The physico-chemical and chromatic characteristics of grapes (Vitis vinifera L. cv. Monastrell) harvested at six dif- ferent degree of ripeness (from August 16 to October 24, 2002) and that of the wines obtained from these grapes have been stu- died. The grape anthocyanins content (mg/kg of berry fresh weight) was maximum in those grapes harvested on September 11 and 16 (804.1 and 822.6 mg/kg, respectively) and decreased for grapes harvested in October. However, the results showed that the grapes with the highest anthocyanin concentration did not lead to the highest colored wines. The wines elaborated from grapes harvested on October 16 (671.9 mg of anthocyanins per kg of berry fresh weight) had the best chromatic characteristics and better withstood aging in the bottle; the extent of cell wall degradation in overly matured grapes probably facilitated the extraction of phenolic compounds from skins. However, the chromatic quality of wines made from grapes harvested one week later (October 24, the most mature grapes) was lower than that from October 16, with lower color intensity (13 % lower in the wine elaborated from grapes harvested in October 24) and a percentage of yellow color 6 % higher in this wine. -
Determination of Wine Color by UV-VIS Spectroscopy, Johan
Determination of wine colour by UV-VIS Spectroscopy following Sudraud method Johan Leinders, Product Manager Spectroscopy 1 1. A bit of background Why measure the colour of wine? •Verification of lot-to-lot consistency in wine color, particularly with varietal blends. •Monitoring color consistency over a season and from season-to-season. •Monitoring the change in wine color over time. 2 1. A bit of background 3 1. A bit of background Soil composition (available trace elements) will have an impact on the final properties. Elements like potassium in combination with grape properties will influence the final colour. 4 1. A bit of background High K concentrations are typical for red wines; equilibrium between K, tartaric acid and anthocyanin pigments complex, which is responsible for the red colour. Anthocyanin is a natural colorant which is found in leaves and grapes. About 250 different variations of the anthocyanin complex are known. They all contain the structure of the common “Flavin” molecule which will be substituted at 7 possible positions from simple -OH to complex sugar molecules. R1 R2 Fig. 2: Flavene is the base of the anthocyan 0 R3 structure, R1 to R7 represent organic groups R7 which will generate the difference among the anthocyanes R4 5 R6 R5 2. Wine Colour Determination The definition of wine colour: analysis of absorption spectra of wine samples are required. Physically, the colour is a light characteristic, measurable in terms of intensity and wavelength. Anthocyanin pigments are absorbing in the GREEN portion of the visible spectra, giving to human eye the sensation of colour RED. -

Wine Regulations 2005
S. I. of 2005 NATIONAL AGENCY FOR FOOD AND DRUG ADMINISTRATION AND CONTROL ACT 1993 (AS AMENDED) Wine Regulations 2005 Commencement: In exercise of the powers conferred on the Governing Council of the National Agency for Food and Drug Administration and Control (NAFDAC) by Sections 5 and 29 of the National Agency for Food and Drug Administration and Control Act 1993, as amended, and of all the powers enabling it in that behalf, THE GOVERNING COUNCIL OF THE NATIONAL AGENCY FOR FOOD AND DRUG ADMINISTRATION AND CONTROL with the approval of the Honourable Minister of Health hereby makes the following Regulations:- Prohibition: 1. No person shall manufacture, import, export, advertise, sell or distribute wine specified in Schedule I to these Regulations in Nigeria unless it has been registered in accordance with the provisions of these regulations. Use and Limit of 2. The use and limits of any food additives or food food additives. colours in the manufacture of wine shall be as approved by the Agency. Labelling. 3. (1) The labeling of wine shall be in accordance with the Pre-packaged Food (Labelling) Regulations 2005. (2) Notwithstanding Regulation 3 (i) of these Regulations, wines that contain less than 10 percent absolute alcohol by volume shall have the ‘Best Before’ date declared. 1 Name of Wine 4. (1) The name of every wine shall indicate the to indicate the accurate nature. nature etc. (2) Where a name has been established for the wine in these Regulations, such a name shall only be used. (3) Where no common name exists for the wine, an appropriate descriptive name shall be used. -

[email protected] Lusso Means “Luxury
Lusso Lusso means “luxury” in Italian. This luxurious Cabernet Sauvignon contains fruit from the St. Helena Appellation of Napa Valley and is 100% Estate Grown. Lusso comes from the best grapes we grow. Vintage: 2015 Harvest Notes: Problem free harvest that produced clean, healthy grapes resulting in high-quality wines despite the drought and a very small crop with a little uneven ripening. Picking ended in October. Blend: 100% Cabernet Sauvignon Vintage: 2014 Harvest Notes: A dream vintage, with high quality throughout. Drought conditions and small crop size did prove to be minor irritants. Everything was ready to pick in mid- August. Tasting Notes: This wine has aromas of black licorice, nutmeg, and red currant with hints of mocha and cherry concluding with a velvet-like texture and silky finish. Blend: 100% Cabernet Sauvignon Vintage: 2013 Harvest Notes: An ideal growing season with dry conditions and a long, sunny summer. Despite being a drought year it is worthy to be called superior. Tasting Notes: Aged 27 months on new French Oak this wine showcases flavors of blackberries, vanilla and espresso. This handcrafted Cabernet lingers on your palate long after the wine has left your glass. Blend: 100% Cabernet Sauvignon Vintage: 2012 Harvest Notes: An ideal season with no frosts, a mild spring and summer and a tranquil fall. We are elated by the quality and quantity of the 2012 harvest. There is a level of excellence that supersedes past vintages, going back decades. Tasting Notes: A youthful and exuberant purple hue offers classic Cabernet aromas of cassis, cocoa and brambly black cherries. -

The Influence of Cabernet Sauvignon Grape Maturity on the Concentration and Extraction of Colour and Phenolic Compounds in Wine
The influence of Cabernet Sauvignon grape maturity on the concentration and extraction of colour and phenolic compounds in wine Cynthia C. Yonker A thesis submitted for fulfillment of the degree of Doctor of Philosophy at the University of Adelaide School of Agriculture, Food and Wine September 2012 Table of Contents Summary .............................................................................................................................................. vi Declaration .......................................................................................................................................... viii Statement of the contributions of jointly authored papers ..................................................................... ix Acknowledgements .............................................................................................................................. xi Abbreviations ...................................................................................................................................... xiii List of Figures and Tables .................................................................................................................. xvi 1 Introduction ................................................................................................................................... 1 1.1 Introduction ........................................................................................................................... 2 1.2 General description of phenolic compounds in grapes and wines -

National Agency for Food and Drug Administration and Control (Nafdac) Wine Regulations 2019
NATIONAL AGENCY FOR FOOD AND DRUG ADMINISTRATION AND CONTROL (NAFDAC) WINE REGULATIONS 2019 1 ARRANGEMENT OF REGULATIONS Commencement 1. Scope 2. Prohibition 3. Use and Limit of food additives 4. Categories of Grape Wine 5. Vintage dating 6. Varietal designations 7. Sugar content and sweetness descriptors 8. Single-vineyard designated wines 9. Labelling 10. Name of Wine to indicate the nature 11. Traditional terms of quality 12. Advertisement 13. Penalty 14. Forfeiture 15. Interpretation 16. Repeal 17. Citation 18. Schedules 2 Commencement: In exercise of the powers conferred on the Governing Council of the National Agency for Food and Drug Administration and Control (NAFDAC) by sections 5 and 30 of the National Agency for Food and Drug Administration and Control Act Cap NI Laws of the Federation of Nigeria (LFN) 2004 and all powers enabling it in that behalf, the Governing Council of the National Agency for Food and Drug Administration and Control with the approval of the Honourable Minister of Health hereby makes the following Regulations:- 1. Scope These Regulations shall apply to wine manufactured, imported, exported, advertised, sold, distributed or used in Nigeria. 2. Prohibition: No person shall manufacture, import, export, advertise, sell or distribute wine specified in Schedule I to these Regulations in Nigeria unless it has been registered in accordance with the provisions of these Regulations. 3. Use and Limit of food additives. (1) The use and limits of any food additives or food colors in the manufacture of wine shall be as approved by the Agency. (2) Where sulphites are present at a level above 10ppm, it shall require a declaration on the label that it contains sulphites. -

Glossary of Wine Terms - Wikipedia, the Free Encyclopedia 4/28/10 12:05 PM
Glossary of wine terms - Wikipedia, the free encyclopedia 4/28/10 12:05 PM Glossary of wine terms From Wikipedia, the free encyclopedia The glossary of wine terms lists the definitions of many general terms used within the wine industry. For terms specific to viticulture, winemaking, grape varieties, and wine tasting, see the topic specific list in the "See Also" section below. Contents: Top · 0–9 A B C D E F G H I J K L M N O P Q R S T U V W X Y Z A A.B.C. Acronym for "Anything but Chardonnay" or "Anything but Cabernet". A term conceived by Bonny Doon's Randall Grahm to describe wine drinkers interest in grape varieties A.B.V. Abbreviation of alcohol by volume, generally listed on a wine label. AC Abbreviation for "Agricultural Cooperative" on Greek wine labels and for Adega Cooperativa on Portuguese labels. Adega Portuguese wine term for a winery or wine cellar. Altar wine The wine used by the Catholic Church in celebrations of the Eucharist. http://en.wikipedia.org/wiki/Glossary_of_wine_terms Page 1 of 35 Glossary of wine terms - Wikipedia, the free encyclopedia 4/28/10 12:05 PM A.O.C. Abbreviation for Appellation d'Origine Contrôlée, (English: Appellation of controlled origin), as specified under French law. The AOC laws specify and delimit the geography from which a particular wine (or other food product) may originate and methods by which it may be made. The regulations are administered by the Institut National des Appellations d'Origine (INAO). A.P. -
Application UV Wine Colour
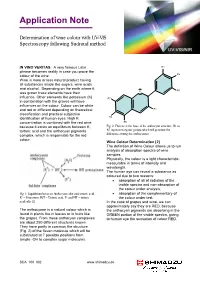
Application Note Determination of wine colour with UV-VIS Spectroscopy following Sudraud method IN VINO VERITAS. A very famous Latin R1 phrase becomes reality in case you prove the colour of the wine. R2 Wine is more or less natural product having all substances inside like sugars, wine acids and alcohol. Depending on the earth where it R3 was grown trace elements have their 0 influence. Other elements like potassium (K) R7 in combination with the graves will have influences on the colour. Colour can be white and red or different depending on theoretical R4 classification and practical subjective identification of human eyes. High K R6 concentration is combined with the red wine R5 because it exists an equilibrium between K, Fig. 2: Flavene is the base of the anthocyan structure, R1 to tartaric acid and the anthocyan pigments R7 represent organic groups which will generate the complex, which is responsible for the red difference among the anthocyanes colour. Wine Colour Determination [2] The definition of Wine Colour allows us to run analysis of absorption spectra of wine samples. Physically, the colour is a light characteristic, measurable in terms of intensity and wavelength. The human eye can reveal a substance as coloured due to two reasons: • absorption of all of radiation of the visible spectra and non-absorption of the colour under analysis; Fig. 1: Equilibrium between Anthocyan color and tartaric acid, • absorption of the complementary of K+ = Potassium, H2T = Tartaric acid, T= and HT- = tartaric the colour under test. acid salts [1] In the case of grapes and wine, we can approximately say they are RED, because The anthocyane is a natural colour which is the anthocyan pigments are absorbing in the found in plants like in leaves or in fruits like GREEN portion of the visible spectra, giving the grapes. -
Wine and Style Guide
A Guide to selecting the wine you really want to drink Created by Roger C. Bohmrich Master of Wine Style and $9.95 Wine W ine and Style A G u i d e 2n d e d i t i on W hen Style iS SubStAnce: Selecting the Wine You Really Want to Drink In this guide... Criteria for Wine and Style Classification 1 Sparkling Wines 2 White Wines, Light to Medium Bodied 4 Rosé Wines 8 White Wines, Full Bodied 10 Red Wines, Light to Medium Bodied 14 Red Wines, Medium Weight 18 Red Wines, Concentrated Full Bodied 22 Sweet Dessert Wines 28 Fortified Sweet Wines 30 Created by Roger C. Bohmrich, Master of Wine 34 Roger C. Bohmrich, Master of Wine Criteria for Wine and Style Classification m concentration, or the “extract” determining taste intensity m weight, the degree of fullness in the mouth, partly due to alcohol m acidity, a critical component for food pairing i n t h i S gu i d e , W i n e S ar e c l assi fi e d b y t h e i r St y l e , m tannin, if any, an astringent taste (bitter to some people) in red wines that balances fatty foods placing them in modules which share key taste m sweetness, if any, remaining from the grapes attributes. This new concept departs from the m wood influences, if any, ranging from barely standard approach of presenting wines by country, noticeable to marked (woody, coconut, vanilla, region or grape variety. Instead, wines are categorized clove, cinnamon, etc.) by fundamental characteristics that truly matter, at the The classification of wine by style allows you table with food.