Sampling Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Designing Commutative Cascades of Multidimensional Upsamplers And
IEEE SIGNAL PROCESSING LETTERS: SPL.SP.4.1 THEORY, ALGORITHMS, AND SYSTEMS 0 Designing Commutative Cascades of Multidimensional Upsamplers and Downsamplers Brian L. Evans, Member, IEEE Abstract In multiple dimensions, the cascade of an upsampler by L and a downsampler by L commutes if and only if the integer matrices L and M are right coprime and LM = ML. This pap er presents algorithms to design L and M that yield commutative upsampler/dowsampler cascades. We prove that commutativity is p ossible if the 1 Jordan canonical form of the rational resampling matrix R = LM is equivalent to the Smith-McMillan form of R. A necessary condition for this equivalence is that R has an eigendecomp osition and the eigenvalues are rational. B. L. Evans is with the Department of Electrical and Computer Engineering, The UniversityofTexas at Austin, Austin, TX 78712-1084, USA. E-mail: [email protected], Web: http://www.ece.utexas.edu/~b evans, Phone: 512 232-1457, Fax: 512 471-5907. This work was sp onsored in part by NSF CAREER Award under Grant MIP-9702707. July 31, 1997 DRAFT IEEE SIGNAL PROCESSING LETTERS: SPL.SP.4.1 THEORY, ALGORITHMS, AND SYSTEMS 1 I. Introduction 1 Resampling systems scale the sampling rate by a rational factor R = L=M = LM , or 1 equivalently decimate by H = M=L = L M [1], by essentially upsampling by L, ltering, and downsampling by M . In converting compact disc data sampled at 44.1 kHz to digital audio tap e 48000 Hz 160 data sampled at 48 kHz, R = = . Because we can always factor R into coprime 44100 Hz 147 integers L and M , we can always commute the upsampler and downsampler which leads to ecient p olyphase structures of the resampling system. -

Generalizing Sampling Theory for Time-Varying Nyquist Rates Using Self-Adjoint Extensions of Symmetric Operators with Deficiency Indices (1,1) in Hilbert Spaces
Generalizing Sampling Theory for Time-Varying Nyquist Rates using Self-Adjoint Extensions of Symmetric Operators with Deficiency Indices (1,1) in Hilbert Spaces by Yufang Hao A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Doctor of Philosophy in Applied Mathematics Waterloo, Ontario, Canada, 2011 c Yufang Hao 2011 I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. ii Abstract Sampling theory studies the equivalence between continuous and discrete representa- tions of information. This equivalence is ubiquitously used in communication engineering and signal processing. For example, it allows engineers to store continuous signals as discrete data on digital media. The classical sampling theorem, also known as the theorem of Whittaker-Shannon- Kotel'nikov, enables one to perfectly and stably reconstruct continuous signals with a con- stant bandwidth from their discrete samples at a constant Nyquist rate. The Nyquist rate depends on the bandwidth of the signals, namely, the frequency upper bound. Intuitively, a signal's `information density' and ‘effective bandwidth' should vary in time. Adjusting the sampling rate accordingly should improve the sampling efficiency and information storage. While this old idea has been pursued in numerous publications, fundamental problems have remained: How can a reliable concept of time-varying bandwidth been defined? How can samples taken at a time-varying Nyquist rate lead to perfect and stable reconstruction of the continuous signals? This thesis develops a new non-Fourier generalized sampling theory which takes samples only as often as necessary at a time-varying Nyquist rate and maintains the ability to perfectly reconstruct the signals. -
Discrete - Time Signals and Systems
Discrete - Time Signals and Systems Sampling – II Sampling theorem & Reconstruction Yogananda Isukapalli Sampling at diffe- -rent rates From these figures, it can be concluded that it is very important to sample the signal adequately to avoid problems in reconstruction, which leads us to Shannon’s sampling theorem 2 Fig:7.1 Claude Shannon: The man who started the digital revolution Shannon arrived at the revolutionary idea of digital representation by sampling the information source at an appropriate rate, and converting the samples to a bit stream Before Shannon, it was commonly believed that the only way of achieving arbitrarily small probability of error in a communication channel was to 1916-2001 reduce the transmission rate to zero. All this changed in 1948 with the publication of “A Mathematical Theory of Communication”—Shannon’s landmark work Shannon’s Sampling theorem A continuous signal xt( ) with frequencies no higher than fmax can be reconstructed exactly from its samples xn[ ]= xn [Ts ], if the samples are taken at a rate ffs ³ 2,max where fTss= 1 This simple theorem is one of the theoretical Pillars of digital communications, control and signal processing Shannon’s Sampling theorem, • States that reconstruction from the samples is possible, but it doesn’t specify any algorithm for reconstruction • It gives a minimum sampling rate that is dependent only on the frequency content of the continuous signal x(t) • The minimum sampling rate of 2fmax is called the “Nyquist rate” Example1: Sampling theorem-Nyquist rate x( t )= 2cos(20p t ), find the Nyquist frequency ? xt( )= 2cos(2p (10) t ) The only frequency in the continuous- time signal is 10 Hz \ fHzmax =10 Nyquist sampling rate Sampling rate, ffsnyq ==2max 20 Hz Continuous-time sinusoid of frequency 10Hz Fig:7.2 Sampled at Nyquist rate, so, the theorem states that 2 samples are enough per period. -

Deep Image Prior for Undersampling High-Speed Photoacoustic Microscopy
Photoacoustics 22 (2021) 100266 Contents lists available at ScienceDirect Photoacoustics journal homepage: www.elsevier.com/locate/pacs Deep image prior for undersampling high-speed photoacoustic microscopy Tri Vu a,*, Anthony DiSpirito III a, Daiwei Li a, Zixuan Wang c, Xiaoyi Zhu a, Maomao Chen a, Laiming Jiang d, Dong Zhang b, Jianwen Luo b, Yu Shrike Zhang c, Qifa Zhou d, Roarke Horstmeyer e, Junjie Yao a a Photoacoustic Imaging Lab, Duke University, Durham, NC, 27708, USA b Department of Biomedical Engineering, Tsinghua University, Beijing, 100084, China c Division of Engineering in Medicine, Department of Medicine, Brigham and Women’s Hospital, Harvard Medical School, Cambridge, MA, 02139, USA d Department of Biomedical Engineering and USC Roski Eye Institute, University of Southern California, Los Angeles, CA, 90089, USA e Computational Optics Lab, Duke University, Durham, NC, 27708, USA ARTICLE INFO ABSTRACT Keywords: Photoacoustic microscopy (PAM) is an emerging imaging method combining light and sound. However, limited Convolutional neural network by the laser’s repetition rate, state-of-the-art high-speed PAM technology often sacrificesspatial sampling density Deep image prior (i.e., undersampling) for increased imaging speed over a large field-of-view. Deep learning (DL) methods have Deep learning recently been used to improve sparsely sampled PAM images; however, these methods often require time- High-speed imaging consuming pre-training and large training dataset with ground truth. Here, we propose the use of deep image Photoacoustic microscopy Raster scanning prior (DIP) to improve the image quality of undersampled PAM images. Unlike other DL approaches, DIP requires Undersampling neither pre-training nor fully-sampled ground truth, enabling its flexible and fast implementation on various imaging targets. -

ELEG 5173L Digital Signal Processing Ch. 3 Discrete-Time Fourier Transform
Department of Electrical Engineering University of Arkansas ELEG 5173L Digital Signal Processing Ch. 3 Discrete-Time Fourier Transform Dr. Jingxian Wu [email protected] 2 OUTLINE • The Discrete-Time Fourier Transform (DTFT) • Properties • DTFT of Sampled Signals • Upsampling and downsampling 3 DTFT • Discrete-time Fourier Transform (DTFT) X () x(n)e jn n – (radians): digital frequency • Review: Z-transform: X (z) x(n)zn n0 j X () X (z) | j – Replace z with e . ze • Review: Fourier transform: X () x(t)e jt – (rads/sec): analog frequency 4 DTFT • Relationship between DTFT and Fourier Transform – Sample a continuous time signal x a ( t ) with a sampling period T xs (t) xa (t) (t nT ) xa (nT ) (t nT ) n n – The Fourier Transform of ys (t) jt jnT X s () xs (t)e dt xa (nT)e n – Define: T • : digital frequency (unit: radians) • : analog frequency (unit: radians/sec) – Let x(n) xa (nT) X () X s T 5 DTFT • Relationship between DTFT and Fourier Transform (Cont’d) – The DTFT can be considered as the scaled version of the Fourier transform of the sampled continuous-time signal jt jnT X s () xs (t)e dt xa (nT)e n x(n) x (nT) T a jn X () X s x(n)e T n 6 DTFT • Discrete Frequency – Unit: radians (the unit of continuous frequency is radians/sec) – X ( ) is a periodic function with period 2 j2 n jn j2n jn X ( 2 ) x(n)e x(n)e e x(n)e X () n n n – We only need to consider for • For Fourier transform, we need to consider 1 – f T 2 2T 1 – f T 2 2T 7 DTFT • Example: find the DTFT of the following signal – 1. -
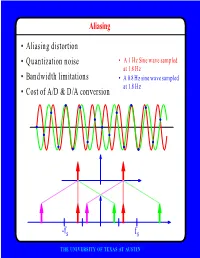
F • Aliasing Distortion • Quantization Noise • Bandwidth Limitations • Cost of A/D & D/A Conversion
Aliasing • Aliasing distortion • Quantization noise • A 1 Hz Sine wave sampled at 1.8 Hz • Bandwidth limitations • A 0.8 Hz sine wave sampled at 1.8 Hz • Cost of A/D & D/A conversion -fs fs THE UNIVERSITY OF TEXAS AT AUSTIN Advantages of Digital Systems Perfect reconstruction of a Better trade-off between signal is possible even after bandwidth and noise severe distortion immunity performance digital analog bandwidth Increase signal-to-noise ratio simply by adding more bits SNR = -7.2 + 6 dB/bit THE UNIVERSITY OF TEXAS AT AUSTIN Advantages of Digital Systems Programmability • Modifiable in the field • Implement multiple standards • Better user interfaces • Tolerance for changes in specifications • Get better use of hardware for low-speed operations • Debugging • User programmability THE UNIVERSITY OF TEXAS AT AUSTIN Disadvantages of Digital Systems Programmability • Speed is too slow for some applications • High average power and peak power consumption RISC (2 Watts) vs. DSP (50 mW) DATA PROG MEMORY MEMORY HARVARD ARCHITECTURE • Aliasing from undersampling • Clipping from quantization Q[v] v v THE UNIVERSITY OF TEXAS AT AUSTIN Analog-to-Digital Conversion 1 --- T h(t) Q[.] xt() yt() ynT() yˆ()nT Anti-Aliasing Sampler Quantizer Filter xt() y(nT) t n y(t) ^y(nT) t n THE UNIVERSITY OF TEXAS AT AUSTIN Resampling Changing the Sampling Rate • Conversion between audio formats Compact 48.0 Digital Disc ---------- Audio Tape 44.1 KHz44.1 48 KHz • Speech compression Speech 1 Speech for on DAT --- Telephone 48 KHz 6 8 KHz • Video format conversion -

Evaluating Oscilloscope Sample Rates Vs. Sampling Fidelity: How to Make the Most Accurate Digital Measurements
AC 2011-2914: EVALUATING OSCILLOSCOPE SAMPLE RATES VS. SAM- PLING FIDELITY Johnnie Lynn Hancock, Agilent Technologies About the Author Johnnie Hancock is a Product Manager at Agilent Technologies Digital Test Division. He began his career with Hewlett-Packard in 1979 as an embedded hardware designer, and holds a patent for digital oscillo- scope amplifier calibration. Johnnie is currently responsible for worldwide application support activities that promote Agilent’s digitizing oscilloscopes and he regularly speaks at technical conferences world- wide. Johnnie graduated from the University of South Florida with a degree in electrical engineering. In his spare time, he enjoys spending time with his four grandchildren and restoring his century-old Victorian home located in Colorado Springs. Contact Information: Johnnie Hancock Agilent Technologies 1900 Garden of the Gods Rd Colorado Springs, CO 80907 USA +1 (719) 590-3183 johnnie [email protected] c American Society for Engineering Education, 2011 Evaluating Oscilloscope Sample Rates vs. Sampling Fidelity: How to Make the Most Accurate Digital Measurements Introduction Digital storage oscilloscopes (DSO) are the primary tools used today by digital designers to perform signal integrity measurements such as setup/hold times, rise/fall times, and eye margin tests. High performance oscilloscopes are also widely used in university research labs to accurately characterize high-speed digital devices and systems, as well as to perform high energy physics experiments such as pulsed laser testing. In addition, general-purpose oscilloscopes are used extensively by Electrical Engineering students in their various EE analog and digital circuits lab courses. The two key banner specifications that affect an oscilloscope’s signal integrity measurement accuracy are bandwidth and sample rate. -
Enhancing ADC Resolution by Oversampling
AVR121: Enhancing ADC resolution by oversampling 8-bit Features Microcontrollers • Increasing the resolution by oversampling • Averaging and decimation • Noise reduction by averaging samples Application Note 1 Introduction Atmel’s AVR controller offers an Analog to Digital Converter with 10-bit resolution. In most cases 10-bit resolution is sufficient, but in some cases higher accuracy is desired. Special signal processing techniques can be used to improve the resolution of the measurement. By using a method called ‘Oversampling and Decimation’ higher resolution might be achieved, without using an external ADC. This Application Note explains the method, and which conditions need to be fulfilled to make this method work properly. Figure 1-1. Enhancing the resolution. A/D A/D A/D 10-bit 11-bit 12-bit t t t Rev. 8003A-AVR-09/05 2 Theory of operation Before reading the rest of this Application Note, the reader is encouraged to read Application Note AVR120 - ‘Calibration of the ADC’, and the ADC section in the AVR datasheet. The following examples and numbers are calculated for Single Ended Input in a Free Running Mode. ADC Noise Reduction Mode is not used. This method is also valid in the other modes, though the numbers in the following examples will be different. The ADCs reference voltage and the ADCs resolution define the ADC step size. The ADC’s reference voltage, VREF, may be selected to AVCC, an internal 2.56V / 1.1V reference, or a reference voltage at the AREF pin. A lower VREF provides a higher voltage precision but minimizes the dynamic range of the input signal. -

Fourier Analysis and Sampling Theory
Reading Required: Shirley, Ch. 9 Recommended: Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Fourier analysis and Don P. Mitchell and Arun N. Netravali, “Reconstruction Filters in Computer Computer sampling theory Graphics ,” Computer Graphics, (Proceedings of SIGGRAPH 88). 22 (4), pp. 221-228, 1988. Brian Curless CSE 557 Fall 2009 1 2 What is an image? Images as functions We can think of an image as a function, f, from R2 to R: f(x,y) gives the intensity of a channel at position (x,y) Realistically, we expect the image only to be defined over a rectangle, with a finite range: • f: [a,b]x[c,d] Æ [0,1] A color image is just three functions pasted together. We can write this as a “vector-valued” function: ⎡⎤rxy(, ) f (,xy )= ⎢⎥ gxy (, ) ⎢⎥ ⎣⎦⎢⎥bxy(, ) We’ll focus in grayscale (scalar-valued) images for now. 3 4 Digital images Motivation: filtering and resizing In computer graphics, we usually create or operate What if we now want to: on digital (discrete)images: smooth an image? Sample the space on a regular grid sharpen an image? Quantize each sample (round to nearest enlarge an image? integer) shrink an image? If our samples are Δ apart, we can write this as: In this lecture, we will explore the mathematical underpinnings of these operations. f [n ,m] = Quantize{ f (n Δ, m Δ) } 5 6 Convolution Convolution in 2D One of the most common methods for filtering a In two dimensions, convolution becomes: function, e.g., for smoothing or sharpening, is called convolution. -

JASON Manual
Weiss Engineering Ltd. Florastrasse 42, 8610 Uster, Switzerland www.weiss-highend.com JASON OWNERS MANUAL OWNERS MANUAL FOR WEISS JASON CD TRANSPORT INTRODUCTION Dear Customer Congratulations on your purchase of the JASON CD Transport and welcome to the family of Weiss equipment owners! The JASON is the result of an intensive research and development process. Research was conducted both in analog and digital circuit design, as well as in signal processing algorithm specification. On the following pages I will introduce you to our views on high quality audio processing. These include fundamental digital and analog audio concepts and the JASON CD Transport. I wish you a long-lasting relationship with your JASON. Yours sincerely, Daniel Weiss President, Weiss Engineering Ltd. Page: 2 Date: 03/13 /dw OWNERS MANUAL FOR WEISS JASON CD TRANSPORT TABLE OF CONTENTS 4 A short history of Weiss Engineering 5 Our mission and product philosophy 6 Advanced digital and analog audio concepts explained 6 Jitter Suppression, Clocking 8 Upsampling, Oversampling and Sampling Rate Conversion in General 11 Reconstruction Filters 12 Analog Output Stages 12 Dithering 14 The JASON CD Transport 14 Features 17 Operation 21 Technical Data 22 Contact Page: 3 Date: 03/13 /dw OWNERS MANUAL FOR WEISS JASON CD TRANSPORT A SHORT HISTORY OF WEISS ENGINEERING After studying electrical engineering, Daniel Weiss joined the Willi Studer (Studer - Revox) company in Switzerland. His work included the design of a sampling frequency converter and of digital signal processing electronics for digital audio recorders. In 1985, Mr. Weiss founded the company Weiss Engineering Ltd. From the outset the company concentrated on the design and manufacture of digital audio equipment for mastering studios. -

Filter Effects and Filter Artifacts in the Analysis of Electrophysiological Data
GENERAL COMMENTARY published: 09 July 2012 doi: 10.3389/fpsyg.2012.00233 Filter effects and filter artifacts in the analysis of electrophysiological data Andreas Widmann* and Erich Schröger Institute of Psychology, University of Leipzig, Leipzig, Germany *Correspondence: [email protected] Edited by: Guillaume A. Rousselet, University of Glasgow, UK Reviewed by: Rufin VanRullen, Centre de Recherche Cerveau et Cognition, France Lucas C. Parra, City College of New York, USA A commentary on unity gain at DC (the step response never FILTER EFFECTS VS. FILTER ARTIFACTS returns to one). These artifacts are due to a We also recommend to distinguish between Four conceptual fallacies in mapping the known misconception in FIR filter design in filter effects, that is, the obligatory effects time course of recognition EEGLAB1. The artifacts are further ampli- any filter with equivalent properties – cutoff by VanRullen, R. (2011). Front. Psychol. fied by filtering twice, forward and back- frequency, roll-off, ripple, and attenuation 2:365. doi: 10.3389/fpsyg.2011.00365 ward, to achieve zero-phase. – would have on the data (e.g., smoothing With more appropriate filters the under- of transients as demonstrated by the filter’s Does filtering preclude us from studying estimation of signal onset latency due to step response), and filter artifacts, that is, ERP time-courses? the smoothing effect of low-pass filtering effects which can be minimized by selection by Rousselet, G. A. (2012). Front. Psychol. could be narrowed down to about 4–12 ms of filter type and parameters (e.g., ringing). 3:131. doi: 10.3389/fpsyg.2012.00131 in the simulated dataset (see Figure 1 and Appendix for a simulation), that is, about an CAUSAL FILTERING In a recent review, VanRullen (2011) con- order of magnitude smaller than assumed. -

MULTIRATE SIGNAL PROCESSING Multirate Signal Processing
MULTIRATE SIGNAL PROCESSING Multirate Signal Processing • Definition: Signal processing which uses more than one sampling rate to perform operations • Upsampling increases the sampling rate • Downsampling reduces the sampling rate • Reference: Digital Signal Processing, DeFatta, Lucas, and Hodgkiss B. Baas, EEC 281 431 Multirate Signal Processing • Advantages of lower sample rates –May require less processing –Likely to reduce power dissipation, P = CV2 f, where f is frequently directly proportional to the sample rate –Likely to require less storage • Advantages of higher sample rates –May simplify computation –May simplify surrounding analog and RF circuitry • Remember that information up to a frequency f requires a sampling rate of at least 2f. This is the Nyquist sampling rate. –Or we can equivalently say the Nyquist sampling rate is ½ the sampling frequency, fs B. Baas, EEC 281 432 Upsampling Upsampling or Interpolation •For an upsampling by a factor of I, add I‐1 zeros between samples in the original sequence •An upsampling by a factor I is commonly written I For example, upsampling by two: 2 • Obviously the number of samples will approximately double after 2 •Note that if the sampling frequency doubles after an upsampling by two, that t the original sample sequence will occur at the same points in time t B. Baas, EEC 281 434 Original Signal Spectrum •Example signal with most energy near DC •Notice 5 spectral “bumps” between large signal “bumps” B. Baas, EEC 281 π 2π435 Upsampled Signal (Time) •One zero is inserted between the original samples for 2x upsampling B. Baas, EEC 281 436 Upsampled Signal Spectrum (Frequency) • Spectrum of 2x upsampled signal •Notice the location of the (now somewhat compressed) five “bumps” on each side of π B.