Explaining System Behaviour in Radar Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Commercially Available Low Probability of Intercept Radars and Non-Cooperative ELINT Receiver Capabilities
Calhoun: The NPS Institutional Archive Reports and Technical Reports All Technical Reports Collection 2014-09 Commercially Available Low Probability of Intercept Radars and Non-Cooperative ELINT Receiver Capabilities Heinbach, Kathleen Monterey, California. Naval Postgraduate School, Center for Joint Services Electronic Warfare http://hdl.handle.net/10945/43575 NPS-EC-14-003 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA COMMERCIALLY AVAILABLE LOW PROBABILITY OF INTERCEPT RADARS AND NON-COOPERATIVE ELINT RECEIVER CAPABILITIES by Kathleen Heinbach, Rita Painter, Phillip E. Pace September 2014 Approved for public release; distribution is unlimited THIS PAGE INTENTIONALLY LEFT BLANK Form Approved REPORT DOCUMENTATION PAGE OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing this collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden to Department of Defense, Washington Headquarters Services, Directorate for Information Operations and Reports (0704-0188), 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302. Respondents should be aware that notwithstanding any other provision of law, no person shall be subject to any penalty for failing to comply with a collection of information if it does not display a currently valid OMB control number. PLEASE DO NOT RETURN YOUR FORM TO THE ABOVE ADDRESS. 1. REPORT DATE (DD-MM-YYYY) 2. REPORT TYPE 3. DATES COVERED (From-To) 30-09-2014 Technical Report 4. TITLE AND SUBTITLE 5a. CONTRACT NUMBER Commercially Available Low Probability of Intercept Radars and Non-Cooperative ELINT Receiver Capabilities 5b. -

Corporate Responsibility Report 2006 Thales - Corporate Responsibility Report
Thales - Corporate Responsibility Report 2006 CORPORATE RESPONSIBILITY REPORT 2006 Thales 45 rue de Villiers 92526 Neuilly-sur-Seine Cedex France Tél. : +33 (0) 1 57 77 80 00 www.thalesgroup.com THALES Message from the Chairman p. 1 Thales profile and key figures p. 2 Highlights of 2006 p. 4 Issues and vision p. 5 Corporate governance, ethics and corporate responsibility organisation p. 11 A responsible business growth p. 22 A company of choice p. 27 A broader vision of corporate responsibility p. 50 A responsible player in environmental protection p. 59 A global leader recognised as a responsible player p. 72 CONTENTS INTRODUCTION ĵ This document is the Thales Corporate Responsibility report for 2006. The report presents the Group’s businesses and key figures and reviews the action taken by Thales in 2006 with respect to the company's corporate responsibility. It reports on substantive measures by the company in the areas of finance, employee relations, employment, and social and environmental protection. In accordance with Group’s international involvement, supported by its multidomestic strategy, the report provides detailed information of french companies about social and environmental initiatives as well as actions in other countries where Thales has significant operations. Photos credits: Photopointcom • Design and production: - 7373. Publication date: September 2007. This document is available on www.thalesgroup.com > MESSAGE FROM THE CHAIRMAN his second edition of the Annual “ Corporate Responsibility Report T confirms Thales's commitment to a rigorous and proactive policy in the area of Confidence underpins Corporate Responsibility. the long-term growth and As Thales writes a new chapter in its history, performance of Thales. -
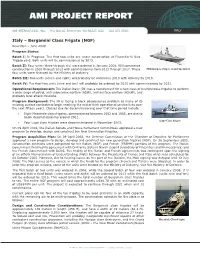
Ami Project Report
AAI L-3 Integrated Systems ABB Process Solutions & Service L-3 Klein Associates Abeking & Rasmussen L-3 MAPPS Amicus L-3 Ocean Systems Argon ST L-3 SPD Technologies Armaris L-3 Wescam ASELAN LaCroix ASMAR Shipbuilding Lazard Carnegie Wylie Atlas Elektronik GmbH Lloyd's Register EMEA AuAVEVAstralian Submarine Corp. Lockheed Martin BBAE INSYTEabcock International Group Lopac Pty Ltd BAE North America Lurssen Werft BAE Ship Systems MacArtney AS BAE Systems Land and Armament Malaysian Navy Bath Iron Works Mandanis Applied Technologies Blohm + Voss MATCOM BMT Defence Services Ltd Mazagon Dock Ltd Boeing MBDA Bofors Defense AB Mac Taggart Scott Bofra Monch Publishing Bosch Rexroth M Ship Co. Boston Whaler MTU BrahMos Aerospace Pve. Ltd NATO HQ - Belgium Campbell Industries Naval Surface Warfare Center Caterpillar Navantia CEDOCAR Navy International Programs Office CEA Technologies Pty Ltd Newport News Shipbuilding Central Marine Design Bureau Almaz Nexus Communications Central Marine Design Bureau Rubin Northrop Grumman Ship Systems Chilean Navy Noske-Kaeser GmbH Cincinnati Gear Co. OCEA Cunico Corp. Oerlikon-Contraves David Brown Engineering Orizzonte Sistemi Navali S.p.A DCNS Philippine Navy DGA Polish Navy Dornier Pratt & Whitney DRS Technologies Qatar Armed Forces Joint EW Center EADS Defense Communications QinetiQ EADS Defense Electronics Raytheon Integrated Defense Systems EADS Defense & Security Systems Raytheon International ECA Ericsson Microwave Systems Raytheon Missile Company Evonik Foams Inc. Reflex Advanced Marine EMS Development Corp Rheinmetall Waffe Munition GmbH Energy Power Systems Rockwell Collins Eurosam Rohde & Schwarz GmbH & Co. KG Fincantieri Rolls-Royce Finmeccanica S.p.A. Saab French Embassy Saab Grintek Defence Pty Ltd Furness Enterprise Ltd Saab Bofors Dynamics G&M Power Plant Saab Danmark General Dynamics-Advanced Systems Sagem Defense Securite Co. -

Thales Nederland BV Afdeling: JRS‐TU Processing Afstudeerbegeleider: Dhr
1 2 Complex Package Design Het ontwerpen van een unieke identiteit met COTS onderdelen Auteur: Hjalmar Haagsman E‐mail: [email protected] Onderwijsinstelling: Universiteit Twente Opleiding: Industrieel Ontwerpen Fase: Bachelor Begeleider namens UT: Dhr. R. Wendrich Stagebedrijf: Thales Nederland BV Afdeling: JRS‐TU Processing Afstudeerbegeleider: Dhr. Ir. H.J.A. Wientjes Waarnemend begeleider*: Dhr. Ir. M.J.A. Van der Kemp Stageperiode: 18‐4‐2005 t/m 15‐7‐2005 *) I.v.m. ziekte van Dhr. Wientjes 3 4 Samenvatting Tijdens het vooronderzoek bleek al dat de context van de consoles en kabinetten een belangrijke rol speelt in het functioneren van de systemen. Dit is het verslag van een onderzoek naar de identiteit van Thales Hengelo, Thales maakt momenteel alleen de consoles, en levert deze dan af bij de en hoe deze kan worden toegepast op de consoles en de kabinetten van klant, met een globaal voorstel voor de inrichting. Randvoorwaarden zoals Thales. Het probleem was dat Thales de afgelopen tijd steeds meer COTS globale verlichting, ruimte om te passeren en “meekijkbaarheid” worden apparatuur (Commercial Of The Shelf) ging inkopen en steeds minder zelf daarbij vaak niet duidelijk genoeg doorgezet. Een belangrijke conclusie ging maken. Vooral de kabinetten hadden daar onder te lijden omdat zij in was dat de stoel, het enige instelbare onderdeel van de console installatie, hun geheel worden ingekocht en daarna ook nog eens worden volgestopt niet door Thales besteld werd. Vaak had Thales zelfs geen idee welke met voornamelijk COTS apparatuur. De vraag was hoe hier mee stoelen er precies gebruikt zouden worden. Dit is door mij bezien als een omgegaan moest worden om de kabinetten toch “typisch Thales” te gemiste kans, omdat de stoel nog veel ruimte heeft voor uitbreiding zoals maken. -

Consolidated Financial Statements at 31 December
CONSOLIDATED FINANCIAL STATEMENTS AT 31 DECEMBER 2019 -1- CONTENTS CONSOLIDATED PROFIT AND LOSS ACCOUNT ................................................................................................................. 3 CONSOLIDATED STATEMENT OF COMPREHENSIVE INCOME ............................................................................................ 4 CONSOLIDATED STATEMENT OF CHANGES IN EQUITY ..................................................................................................... 5 CONSOLIDATED BALANCE SHEET ................................................................................................................................... 6 CONSOLIDATED STATEMENT OF CASH FLOWS ................................................................................................................ 7 NOTES TO THE CONSOLIDATED FINANCIAL STATEMENTS ................................................................................................ 8 1. ACCOUNTING STANDARDS FRAMEWORK .................................................................................................................. 8 1.1 BASIS OF PREPARATION FOR THE 2019 CONSOLIDATED FINANCIAL STATEMENTS ......................................................................... 8 1.2 IMPLEMENTATION OF IFRS 16 (LEASE CONTRACTS) ....................................................................................................................... 8 1.3 NEW MANDATORY STANDARDS EFFECTIVE FROM 31 DECEMBER 2019 ...................................................................................... -

Tax Evasion and Weapon Production Mailbox Arms Companies in the Netherlands
Issue Brief – May 2016 Tax evasion and weapon production Mailbox arms companies in the Netherlands Martin Broek Stop Wapenhandel www.stopwapenhandel.org Tax evasion and weapon production | 1 AUTHOR: Martin Broek EDITORS: Nick Buxton and Wendela de Vries DESIGN: Evan Clayburg Published by Transnational Institute – www.TNI.org and Stop Wapenhandel – www.StopWapenhandel.org Contents of the report may be quoted or reproduced for non-commercial purposes, provided that the source of information is properly cited. TNI would appreciate receiving a copy or link of the text in which this document is used or cited. Please note that for some images the copyright may lie elsewhere and copyright conditions of those images should be based on the copyright terms of the original source. http://www.tni.org/copyright ACKNOWLEDGEMENTS This is an updated briefing, initially released in January 2016. Tax evasion and weapon production | 2 Contents Introduction 4 Chapter 1: Short history of Dutch tax law 6 Chapter 2: Tax evasion in the Netherlands 8 Chapter 3: Top 10 defence industries and Dutch holdings 11 Chapter 4: Tax evasion by company 14 Chapter 5: Corruption and misbehaviour 27 Chapter 6: The Dutch connection in the Malaysian airline disaster 29 Chapter 7: Panama Papers and the arms trade 32 Conclusion 35 Annex – The use of Trusts 36 Notes 37 Tax evasion and weapon production | 3 Introduction The revelations of the leaked Panama Papers in April 2016 pushed the issue of tax and tax evasion high up the international political agenda. Prompting scandals and high profile resignations, the 11.5 million documents from the offshore law firm Mossack Fonseca unveiled some of the tricks and strategies that countless politicians, businessmen and elites use to avoid taxes. -

TACTICOS Combat Management System
UNCLASSIFIED DC TACTICOS Combat Management System - Exploiting the Full DDS Potential Piet Griffioen ([email protected]) © THALES NEDERLAND B.V. AND/OR ITS SUPPLIERS THIS INFORMATION CARRIER CONTAINS PROPRIETARY INFORMATION WHICH SHALL NOT BE USED, REPRODUCED OR DISCLOSED DDS Information Day TO THIRD PARTIES WITHOUT PRIOR WRITTEN AUTHORIZATION BY THALES NEDERLAND B.V. AND/OR ITS SUPPLIERS, AS APPLICABLE. 1 THALES NEDERLAND B.V. UNCLASSIFIED Content n DDS as an enabler for the success of the TACTICOS Combat Management System (CMS) ct to restrictive legend on title page title on legend restrictive to ct n Combat Management System n TACTICOS CMS n Architectural principles © THALES NEDERLAND B.V. AND/OR ITS SUPPLIERS Subje SUPPLIERS ITS AND/OR B.V. NEDERLAND THALES © n Role of the DDS n Information centric approach DC - DDS Information Day CMS 2 THALES NEDERLAND B.V. UNCLASSIFIED Above Water Systems Communication System Navigation ct to restrictive legend on title page title on legend restrictive to ct Platform System Management System © THALES NEDERLAND B.V. AND/OR ITS SUPPLIERS Subje SUPPLIERS ITS AND/OR B.V. NEDERLAND THALES © DC - 3D Radar Multi Gun Function DDS Information Day Combat Sonar Radar Management Missiles System 3 THALES NEDERLAND B.V. UNCLASSIFIED Combat Management System (CMS) TDS ESM SIRIUS ECM ct to restrictive legend on title page title on legend restrictive to ct COMINT MIRADOR SMART-L SCOUT • Situation Awareness • Recognition & Identification © THALES NEDERLAND B.V. AND/OR ITS SUPPLIERS Subje SUPPLIERS ITS AND/OR B.V. NEDERLAND THALES © MK41 • Threat Evaluation APAR • Weapon Deployment GOALKEEPER DC CHAFF - GUN TORPEDO SONAR SSM DDS Information Day 4 THALES NEDERLAND B.V. -
Navy Aegis Ballistic Missile Defense (BMD) Program: Background and Issues for Congress
Navy Aegis Ballistic Missile Defense (BMD) Program: Background and Issues for Congress Updated February 6, 2019 Congressional Research Service https://crsreports.congress.gov RL33745 Navy Aegis Ballistic Missile Defense (BMD) Program Summary The Aegis ballistic missile defense (BMD) program, which is carried out by the Missile Defense Agency (MDA) and the Navy, gives Navy Aegis cruisers and destroyers a capability for conducting BMD operations. The Department of Defense’s January 2019 missile defense review report states that the number of operational BMD-capable Aegis ships was 38 at the end of FY2018 and is planned to increase to 60 by the end of FY2023. The Aegis BMD program is funded mostly through MDA’s budget. The Navy’s budget provides additional funding for BMD-related efforts. MDA’s proposed FY2019 budget requests a total of $1,711.8 million in procurement and research and development funding for Aegis BMD efforts, including funding for two Aegis Ashore sites in Poland and Romania that are to be part of the European Phased Adaptive Approach (EPAA). MDA’s budget also includes operations and maintenance (O&M) and military construction (MilCon) funding for the Aegis BMD program. Under the EPAA for European BMD operations, BMD-capable Aegis ships are operating in European waters to defend Europe from potential ballistic missile attacks from countries such as Iran. BMD-capable Aegis ships also operate in the Western Pacific and the Persian Gulf to provide regional defense against potential ballistic missile attacks from countries such as North Korea and Iran. Two Japan-homeported Navy BMD-capable Aegis destroyers included in the above figures—the Fitzgerald (DDG-62) and the John S. -
Annual Report
Annual20 ////////////////////////////////////////////////////////// report 07 Financial report Business review Shareholder information 2007 Annual report Thales 45 rue de Villiers 92200 Neuilly-sur-Seine – FRANCE Tél.: + 33 (0)1 57 77 80 00 www.thalesgroup.com www.thalesgroup.com WorldReginfo - 31f96d7b-6321-44dc-9b56-5ddcb02cd173 The Corporate brochure is available at www.thalesgroup.com WorldReginfo - 31f96d7b-6321-44dc-9b56-5ddcb02cd173 2007 ANNUAL REPORT CONTENTS Overview ........................................................................................................................................................................................................2 Timeline ...........................................................................................................................................................................................................4 Key figures .....................................................................................................................................................................................................6 Governance and auditors ...................................................................................................................................................................8 1 . 2007 FINANCIAL REPORT 1. Directors’ report ............................................................................................................................................................................. 12 2. Consolidated financial statements ............................................................................................................................. -

PCD) PCD Description a ALENIA AA Aerospatiale Avions AB Airbus Military S.L
ASD S2000M Procurement Codes (PCD) PCD Description A ALENIA AA Aerospatiale Avions AB Airbus Military S.L. AC Alcatel-Lucent Deutschland AG AD Alenia Marconi Systems AE Aermachi AF ATLAS ELEKTRONIK GmbH AG Agusta AH Airbus Helicopters France AI Accuracy International Limited AJ Aljo Aluminium-Bau Jonuscheit GmbH AK ARGE K130 AL ALKAN AM Aerospatiale Engins AN Ahlmann Baumaschinen GmbH AO AERO Vodochody AEROSPACE a.s. AP ACOEM AQ AKRUS GmbH & Co. KG AR ARINC Technologies AS AVS AGGREGATEBAU GMBH AT Wärtsilä SAM Electronics GmbH AU Autoflug GmbH AV Alvis Vehicles Ltd AW WEIDELT, A. SYSTEMTECHNIK GMBH & CO. KG AX Amesys AY Aeromaritime Systembau GmbH AZ Albert Ziegler GmbH & Co. KG B BAe BA BETA AIR JSC BB Bundesamt für Ausrüstung, Informationstechnik und Nutzung der Bundeswehr BC Beriev Aircraft Company BD BAE Systems - Type 45 Destroyer PCO BG Diehl Defence GmbH & Co. KG BH BOEING HARPOON BM Beutler Maschinenbau und Vertriebsgesellschaft mbH BN Breda Nardi BO August F.M. Bohnhoff GmbH BP Joh. Heinrich. Bornemann GmbH BT BTL safety construction GmbH BU Brüggemann GmbH + Co. KG BV Blohm+Voss GmbH C CASA CB Schmitz Cargobull GmbH CC CS Communication & Systèmes CD Computing Devices Hastings Ltd CE CEFA SAS CF COFREXPORT DH DEGREANE HORIZON SAS CK CONDOK GmbH CN Com/Net Communicationssysteme & Netzwerkservice CO Euro-ART (Advanced Radar Technology) CS Schniewindt GmbH & Co KG CT Combitherm GmbH CZ CASSIDIAN OPTRONICS GMBH D CAE DA Daimler AG DB Dassault Aviation DC DXC Technology DE Dassault Electronique DF Doll Fahrzeugbau AG DI d-i davit international gmbh Last Updated: 9/7/2021 Page 1 of 6 ASD S2000M Procurement Codes (PCD) PCD Description DK Delitek A/S DM Draeger Medical ANSY GmbH DN Dynamit Nobel Defence GmbH DO Dornier GmbH - EADS Defence Electronics DP Airbus Defence and Space GmbH (Taufkirchen-DEU) DS Dräger Safety AG & Co. -

Thales Nederland B.V
CO₂ Awareness Certificate level CO2 Performance Ladder Certificate v3.0 level 5 Het managementsysteem voor het CO2 bewust handelen van: Thales Nederland B.V. Zuidelijke Havenweg 40, 7554 RR Hengelo, Netherlands Chamber of Commerce number: 06061578 Nace code: 26, 27, 33, 71 Category: large company meets level 5 of the CO2 Performance Ladder handbook version 3.0. P.G. Cornelissen - Area Manager North Europe Issued by: Lloyd's Register Nederland B.V. This certificate is valid only in association with the certificate schedule bearing the same number on which the locations applicable to this approval are listed. Current issue date: 6 August 2019 Original approval date: 6 August 2019 Expiry date: 5 August 2022 Certificate number: 10214900 Approval number(s): 00021608 The scope of this approval is applicable to: Design, development, manufacturing, installation, testing, maintenance and overhaul of radar-, data communication-, optronic-, cryogenic- and information processing systems and equipment including integrated systems and services for defence, (aero)space and civil applications. Lloyd's Register Group Limited, its affiliates and subsidiaries, including Lloyd's Register Quality Assurance Limited (LRQA), and their respective officers, employees or agents are, individually and collectively, referred to in this clause as 'Lloyd's Register'. Lloyd's Register assumes no responsibility and shall not be liable to any person for any loss, damage or expense caused by reliance on the information or advice in this document or howsoever provided, unless that person has signed a contract with the relevant Lloyd's Register entity for the provision of this information or advice and in that case any responsibility or liability is exclusively on the terms and conditions set out in that contract. -
Document De Référence 2012
Document de Référence 2012 RAPPORT FINANCIER ANNUEL Personne responsable 2 Présentation du Groupe 3 Historique 4 Sommaire Chiffres clés 5 1 États financiers 2012 7 1.1 Rapport de gestion du Groupe 8 1.2 Comptes consolidés 32 1.3 Rapport de gestion et comptes de la société mère 94 2 Activités 133 2.1 Chiffres clés 134 2.2 Recherche et innovation 135 2.3 Relations entre Thales et ses filiales 138 2.4 Données sur les principales filiales opérationnelles et principaux sites industriels 140 2.5 Secteurs opérationnels et Zones Géographiques 142 3 Information des actionnaires 159 3.1 Société et capital 160 3.2 Gouvernement d’entreprise 178 3.3 Informations boursières et communication financière 213 4 Responsabilité d’entreprise 221 4.1 Informations sociales 222 4.2 Informations environnementales 241 4.3 Informations sociétales 257 4.4 Table de concordance en vertu de l’article R. 225-105-1 du Code de commerce 263 Sommaire détaillé 266 Table de concordance 274 Table de réconciliation rapport financier annuel 278 Document de référence incluant le rapport financier annuel 2012 Le document de référence a été déposé auprès de l’Autorité des marchés financiers le 3 avril 2013 conformément à l’article 212-13 du règlement général de l’Autorité des marchés financiers. Il pourra être utilisé à l’appui d’une opération financière s’il est complété par une note d’opération visée par l’Autorité des marchés financiers. Il a été établi par l’émetteur et engage la responsabilité de ses signataires. En application de l’article 28 du règlement (CE) n° 809/2004