Chapter 1 Surveying Chapter 1 Surveying Part 650 Engineering Field Handbook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Elementary Functions: Towards Automatically Generated, Efficient
Elementary functions : towards automatically generated, efficient, and vectorizable implementations Hugues De Lassus Saint-Genies To cite this version: Hugues De Lassus Saint-Genies. Elementary functions : towards automatically generated, efficient, and vectorizable implementations. Other [cs.OH]. Université de Perpignan, 2018. English. NNT : 2018PERP0010. tel-01841424 HAL Id: tel-01841424 https://tel.archives-ouvertes.fr/tel-01841424 Submitted on 17 Jul 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Délivré par l’Université de Perpignan Via Domitia Préparée au sein de l’école doctorale 305 – Énergie et Environnement Et de l’unité de recherche DALI – LIRMM – CNRS UMR 5506 Spécialité: Informatique Présentée par Hugues de Lassus Saint-Geniès [email protected] Elementary functions: towards automatically generated, efficient, and vectorizable implementations Version soumise aux rapporteurs. Jury composé de : M. Florent de Dinechin Pr. INSA Lyon Rapporteur Mme Fabienne Jézéquel MC, HDR UParis 2 Rapporteur M. Marc Daumas Pr. UPVD Examinateur M. Lionel Lacassagne Pr. UParis 6 Examinateur M. Daniel Menard Pr. INSA Rennes Examinateur M. Éric Petit Ph.D. Intel Examinateur M. David Defour MC, HDR UPVD Directeur M. Guillaume Revy MC UPVD Codirecteur À la mémoire de ma grand-mère Françoise Lapergue et de Jos Perrot, marin-pêcheur bigouden. -

527 White Rose Lane Renovation
6 5 4 3 2 1 STANDARD ABBREVIATIONS SYMBOLOGY LEGEND 527 WHITE ROSE LANE RENOVATION & AND MTL METAL 1 @ AT FCU FAN COIL UNIT ADDM ADDENDUM FD FLOOR DRAIN NA NOT APPLICABLE 1 2 A7 -01 3 ELEVATION REFERENCE ADJ ADJUSTABLE FDN FOUNDATION NIC NOT IN CONTRACT A2 -01 AFF ABOVE FINISHED FLOOR FE FIRE EXTINGUISHER NO NUMBER AGG AGGREGATE FEC FIRE EXTINGUISHER CABINET NOM NOMINAL 4 2060 Craigshire Road BUILDING CODE INFORMATION GENERAL NOTES AHU AIR HANDLING UNIT FEP FINISH END PANEL NTS NOT TO SCALE EXTERIOR INTERIOR Saint Louis, MO 63146 ALT ALTERNATE FF&E FURNITURE, FIXTURE & EQUIPMENT T. 314.241.8188 PROJECT SUMMARY: 1. THE CONSTRUCTION DOCUMENTS HAVE BEEN CAREFULLY PREPARED BUT MAY NOT DEPICT ALUM ALUMINUM FFE FINISH FLOOR ELEVATION OC ON CENTER SIM F. 314.241.0125 PROJECT INCLUDES THE RENOVATION OF AN EXISTING SINGLE FAMILY EVERY CONDITION TO BE ENCOUNTERED. IT IS THEREFORE THE GENERAL CONTRACTOR & APPROX APPROXIMATE(LY) FG FIBERGLASS OD OUTSIDE DIAMETER ______1 BUILDING SECTION REFERENCE D RESIDENTIAL DWELLING, NEW CONSTRUCTION OF A TWO CAR GARAGE SUBCONTRACTORS RESPONSIBILITY TO FIELD VERIFY ALL CONDITIONS OF THE AFFECTED ARCH ARCHITECT FHCSK FLAT HEAD COUNTERSUNK OFF OFFICE A101 www.kai-db.com TO THE REAR OF THE EXISTING STRUCTURE, AND A COVERED WORK PRIOR TO SUBMITTING A BID. IF CONDITIONS DIFFER OR ADDITIONAL WORK IS REQUIRED ASPH ASPHALT FIN FINISH OH OPPOSITE HAND Missouri State Certificate of Authority #1234567 CONDITIONED CORRIDOR TO CONNECT THE TWO. BEYOND THAT STATED IN THE CONSTRUCTION DOCUMENTS IT IS THE CONTRACTORS AUTO AUTOMATIC FIXT FIXTURE OPNG OPENING SIM RESPONSIBILITY TO BRING SUCH MATTERS TO THE ATTENTION OF THE ARCHITECT IN A WALL SECTION REFERENCE APPLICABLE ST. -

Literacy and Numeracy in Northern Ireland and the Republic of Ireland in International Studies
The Irish Journal of Education, 2015, xl, pp. 3-28. LITERACY AND NUMERACY IN NORTHERN IRELAND AND THE REPUBLIC OF IRELAND IN INTERNATIONAL STUDIES Gerry Shiel and Lorraine Gilleece Educational Research Centre St Patrick’s College, Dublin Recent international assessments of educational achievement at primary, post- primary, and adult levels allow for comparisons of performance in reading literacy and numeracy/mathematics between Northern Ireland and the Republic of Ireland. While students in grade 4 (Year 6) in Northern Ireland significantly outperformed students in the Republic in reading literacy and mathematics in the PIRLS and TIMSS studies in 2011, 15-year olds in the Republic outperformed students in Northern Ireland on reading and mathematical literacy in PISA 2006 and 2012. Performance on PISA reading literacy and mathematics declined significantly from performance in earlier cycles in Northern Ireland in 2006 and in the Republic of Ireland in 2009. However, while performance in the Republic improved in 2012, it has remained at about the same level since 2006 in Northern Ireland. Adults in both Northern Ireland and the Republic performed significantly below the international averages on literacy and numeracy in the 2012 PIAAC study. Results of the studies are discussed in the context of policy initiatives in 2011 to improve literacy and numeracy in both jurisdictions, including the implementation of literacy and numeracy strategies and the establishment of targets for improved performance at system and school levels. Both Northern -

Redalyc.Artificial Vision and Identification for Intelligent
Revista Facultad de Ingeniería Universidad de Antioquia ISSN: 0120-6230 [email protected] Universidad de Antioquia Colombia Barranco Gutiérrez, Alejandro Israel; Medel Juárez, José de Jesús Artificial vision and identification for intelligent orientation using a compass Revista Facultad de Ingeniería Universidad de Antioquia, núm. 58, marzo, 2011, pp. 191-198 Universidad de Antioquia Medellín, Colombia Available in: http://www.redalyc.org/articulo.oa?id=43021467020 How to cite Complete issue Scientific Information System More information about this article Network of Scientific Journals from Latin America, the Caribbean, Spain and Portugal Journal's homepage in redalyc.org Non-profit academic project, developed under the open access initiative Rev. Fac. Ing. Univ. Antioquia N.° 58 pp. 191-198. Marzo, 2011 Artifi cial vision and identifi cation for intelligent orientation using a compass Orientación inteligente usando visión artifi cial e identifi cación con respecto a una brújula Alejandro Israel Barranco Gutiérrez*1, José de Jesús Medel Juárez1, 2, 1Applied Science and Advanced Technologies Research Center, Unidad Legaria 694 Col. Irrigación. Del Miguel Hidalgo C. P. 11500, Mexico D. F. Mexico 2Computer Research Center, Av. Juan de Dios Bátiz. Col. Nueva Industrial Vallejo. Delegación Gustavo A. Madero C. P. 07738 México D. F. Mexico (Recibido el 21 de septiembre de 2009. Aceptado el 30 de noviembre de 2010) Abstract A method to determine the orientation of an object relative to Magnetic North using computer vision and identifi cation techniques, by hand compass is presented. This is a necessary condition for intelligent systems with movements rather than the responses of GPS, which only locate objects within a region. -

Installing a Bench Vise Give Your Workbench the Holding Power It Deserves
Installing a Bench Vise Give your workbench the holding power it deserves. By Craig Bentzley Let’s face it; a workbench This is the best approach for above. Regardless of the type of without vises is basically just an a face vise, because the entire mounting, have your vise(s) in assembly table. Vises provide the length of a board secured for hand before you start so you can muscle for securing workpieces edge work will contact the bench determine the size of the spacers, for planing, sawing, routing, edge for support and additional jaws, and hardware needed for and other tooling operations. clamping, as shown in the photo a trouble-free installation. Of the myriad commercial models, the venerable Record vise is one that has stood the Vise Locati on And Selecti on test of time, because it’s simple A vise’s locati on on the bench determines what it’s called. to install, easy to operate, Face vises are att ached on the front, or face, of the bench; end and designed to survive vises are installed on the end. The best benches have both, generations of use. Although but if you can only aff ord one, I’d go for a face vise initi ally. it’s no longer in production, Right-handers should mount a face vise at the far left of the several clones are available, bench’s front edge and an end vise on the end of the bench including the Eclipse vise, which at the foremost right-hand corner. Southpaws will want to I show in this article. -

Forestry Materials Forest Types and Treatments
-- - Forestry Materials Forest Types and Treatments mericans are looking to their forests today for more benefits than r ·~~.'~;:_~B~:;. A ever before-recreation, watershed protection, wildlife, timber, "'--;':r: .";'C: wilderness. Foresters are often able to enhance production of these bene- fits. This book features forestry techniques that are helping to achieve .,;~~.~...t& the American dream for the forest. , ~- ,.- The story is for landolVners, which means it is for everyone. Millions . .~: of Americans own individual tracts of woodland, many have shares in companies that manage forests, and all OWII the public lands managed by government agencies. The forestry profession exists to help all these landowners obtain the benefits they want from forests; but forests have limits. Like all living things, trees are restricted in what they can do and where they can exist. A tree that needs well-drained soil cannot thrive in a marsh. If seeds re- quire bare soil for germination, no amount of urging will get a seedling established on a pile of leaves. The fOllOwing pages describe th.: ways in which stands of trees can be grown under commonly Occllrring forest conditions ill the United States. Originating, growing, and tending stands of trees is called silvicllllllr~ \ I, 'R"7'" -, l'l;l.f\ .. (silva is the Latin word for forest). Without exaggeration, silviculture is the heartbeat of forestry. It is essential when humans wish to manage the forests-to accelerate the production or wildlife, timber, forage, or to in- / crease recreation and watershed values. Of course, some benerits- t • wilderness, a prime example-require that trees be left alone to pursue their' OWII destiny. -

FOR 274: Forest Measurements and Inventory an Introduction to Surveying
FOR 274: Forest Measurements and Inventory Lecture 5: Principals of Surveying • An Introduction to Surveying • Horizontal Distances & Angles An Introduction to Surveying: Social and Land In Natural Resources we survey populations to gain representative information about something We also conduct land surveys to record the fine-scale topographic detail of an area We use both kinds of surveying in Natural Resources An Introduction to Surveying: Why do we Survey? To measure in the field the distance, bearing, and location of features on the Earth’s surface Geodetic Surveying • Very large distances • Have to account for curvature of the Earth! Plane Surveying • What we do • Thankfully regular trig works just fine 1 An Introduction to Surveying: Why do we Survey? Foresters as a rule do not conduct many new surveys BUT it is very common to: • Retrace old lines • Locate boundaries • Run cruise lines and transects • Analyze post treatments impacts on stream morphology, soils fuels,etc In addition to land survey equipment, Modern tools include the use of GIS and GPS Æ FOR 375 for more details An Introduction to Surveying: Types of Survey Construction Surveys: collect data essential for planning of new projects - constructing a new forest road - putting in a culvert Hydrological Surveys: collect data on stream channel morphology or impacts of treatments on erosion potential An Introduction to Surveying: Types of Survey Topographic Surveys: gather data on natural and man-made features on the Earth's surface to produce a 3D topographic map Typical -

Generating Highly Accurate Values for All Trigonometric Functions
GENERATING HIGHLY ACCURATE VALUES FOR ALL TRIGONOMETRIC FUNCTIONS INTRODUCTION: Although hand calculators and electronic computers have pretty much eliminated the need for trigonometric tables starting about sixty years ago, this was not the case back during WWII when highly accurate trigonometric tables were vital for the calculation of projectile trajectories. At that time a good deal of the war effort in mathematics was devoted to building ever more accurate trig tables some ranging up to twenty digit numerical accuracy. Today such efforts can be considered to have been a waste of time, although they were not so at the time. It is our purpose in this note to demonstrate a new approach for quickly obtaining values for all trigonometric functions exceeding anything your hand calculator can achieve. BASIC TRIGNOMETRIC FUNCTIONS: We begin by defining all six basic trigonometric functions by looking at the following right triangle- The sides a,b, and c of this triangle satisfy the Pythagorean Theorem- a2+b2=c2 we define the six trig functions in terms of this triangle as- sin()=b/c cos( )=a/c tan()=b/a csc()=c/b sec()=c/a) cot()=b/a From Pythagorous we also have at once that – 1 sin( )2 cos( )2 1 and [1 tan( )2 ] . cos( )2 It was the ancient Egyptian pyramid builders who first realized that the most important of these trigonometric functions is tan(). Their measure of this tangent was given in terms of sekels, where 1 sekhel=7. Converting each of the above trig functions into functions of tan() yields- tan( ) 1 sin( ) cos( ) tan( ) tan( ) 1 tan( )2 1 tan( )2 1 tan( )2 1 csc( ) sec( ) 1 tan( )2 cot( ) tan( ) tan( ) In using these equivalent definitions one must be careful of signs and infinities appearing in the approximations to tan(). -

Roman Large-Scale Mapping in the Early Empire
13 · Roman Large-Scale Mapping in the Early Empire o. A. w. DILKE We have already emphasized that in the period of the A further stimulus to large-scale surveying and map early empire1 the Greek contribution to the theory and ping practice in the early empire was given by the land practice of small-scale mapping, culminating in the work reforms undertaken by the Flavians. In particular, a new of Ptolemy, largely overshadowed that of Rome. A dif outlook both on administration and on cartography ferent view must be taken of the history of large-scale came with the accession of Vespasian (T. Flavius Ves mapping. Here we can trace an analogous culmination pasianus, emperor A.D. 69-79). Born in the hilly country of the Roman bent for practical cartography. The foun north of Reate (Rieti), a man of varied and successful dations for a land surveying profession, as already noted, military experience, including the conquest of southern had been laid in the reign of Augustus. Its expansion Britain, he overcame his rivals in the fierce civil wars of had been occasioned by the vast program of colonization A.D. 69. The treasury had been depleted under Nero, carried out by the triumvirs and then by Augustus him and Vespasian was anxious to build up its assets. Fron self after the civil wars. Hyginus Gromaticus, author of tinus, who was a prominent senator throughout the Fla a surveying treatise in the Corpus Agrimensorum, tells vian period (A.D. 69-96), stresses the enrichment of the us that Augustus ordered that the coordinates of surveys treasury by selling to colonies lands known as subseciva. -
Surveying and Drawing Instruments
SURVEYING AND DRAWING INSTRUMENTS MAY \?\ 10 1917 , -;>. 1, :rks, \ C. F. CASELLA & Co., Ltd II to 15, Rochester Row, London, S.W. Telegrams: "ESCUTCHEON. LONDON." Telephone : Westminster 5599. 1911. List No. 330. RECENT AWARDS Franco-British Exhibition, London, 1908 GRAND PRIZE AND DIPLOMA OF HONOUR. Japan-British Exhibition, London, 1910 DIPLOMA. Engineering Exhibition, Allahabad, 1910 GOLD MEDAL. SURVEYING AND DRAWING INSTRUMENTS - . V &*>%$> ^ .f C. F. CASELLA & Co., Ltd MAKERS OF SURVEYING, METEOROLOGICAL & OTHER SCIENTIFIC INSTRUMENTS TO The Admiralty, Ordnance, Office of Works and other Home Departments, and to the Indian, Canadian and all Foreign Governments. II to 15, Rochester Row, Victoria Street, London, S.W. 1911 Established 1810. LIST No. 330. This List cancels previous issues and is subject to alteration with out notice. The prices are for delivery in London, packing extra. New customers are requested to send remittance with order or to furnish the usual references. C. F. CAS ELL A & CO., LTD. Y-THEODOLITES (1) 3-inch Y-Theodolite, divided on silver, with verniers to i minute with rack achromatic reading ; adjustment, telescope, erect and inverting eye-pieces, tangent screw and clamp adjustments, compass, cross levels, three screws and locking plate or parallel plates, etc., etc., in mahogany case, with tripod stand, complete 19 10 Weight of instrument, case and stand, about 14 Ibs. (6-4 kilos). (2) 4-inch Do., with all improvements, as above, to i minute... 22 (3) 5-inch Do., ... 24 (4) 6-inch Do., 20 seconds 27 (6 inch, to 10 seconds, 403. extra.) Larger sizes and special patterns made to order. -
Technical Specifications Part 1 Civil, Structural And
Civil, Structural & Architectural Specifications ANNEX VIII TECHNICAL SPECIFICATIONS PART 1 CIVIL, STRUCTURAL AND ARCHITECTURAL Page 1 of 234 Civil, Structural & Architectural Specifications ANNEX VIII TABLE OF CONTENTS CHAPTER CHAPTER ONE - SITE PREPARATION & DEMOLITION General Building Demolition CHAPTER THREE - CONCRETE WORKS Cast In Place Concrete Concrete Topping (Decorative Stamped Concrete) CHAPTER FOUR - MASONRY Unit Masonry Exterior Stonework CHAPTER FIVE - METAL WORK Metal Fabrications Round Handrail Diameter 40 mm Plexi Shed CHAPTER SIX - WOODWORK Joinery CHAPTER SEVEN - THERMAL AND MOISTURE PROTECTION Sheet Waterproofing Membrane Roofing Tiles Roofing Metal Roofing Roof Drainage Roof Accessories Flashing And Sheet Metal Joint Sealers (Expansion Joint) CHAPTER EIGHT - DOORS AND WINDOWS Metal Door Frames Wood Doors Aluminum Doors And Windows Glass & Glazing Door Hardware (Ironmongery) CHAPTER NINE - FINISHES Lath And Plaster Floor and Wall Cladding Suspended Ceilings Non-Structural Metal Framing Gypsum Board Interior Stonework Painting CHAPTER TEN - SPECIALTIES Toilet Accessories Epoxy Resin Work Anti-Shatter Window Film Access Control CHAPTER ELEVEN - DRINKING WATER Page 2 of 234 Civil, Structural & Architectural Specifications ANNEX VIII Lebanese Standard Page 3 of 234 Civil, Structural & Architectural Specifications ANNEX VIII CHAPTER ONE SITE PREPARATION & DEMOLITION Page 4 of 234 Civil, Structural & Architectural Specifications ANNEX VIII CHAPTER ONE SITE PREPARATION & DEMOLITION PART 1 - GENERAL SCOPE OF WORK The work comprises of the rehabilitation of the Building. SITE PROTECTION The contractor should take all measures to protect the site and to protect the users during the rehabilitation period as per the Engineer instructions. The contractor should not allow or add any load to the existing body to avoid any risk in construction works. -
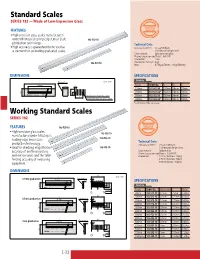
Standard Scales SERIES 182 — Made of Low-Expansion Glass
Standard Scales SERIES 182 — Made of Low-Expansion Glass FEATURES • High-precision glass scales manufactured under Mitutoyo’s leading-edge Linear Scale 182-502-50 production technology. Technical Data • High accuracy is guaranteed to be used as Accuracy (at 20°C): (0.5+L/1000)µm, a standard for calibrating graduated scales. L = Measured length (mm) Glass material: Low expansion glass Thermal expansion coefficient: 8x10-8/K Graduation: 1mm 182-501-50 Graduation thickness: 4µm Mass: 0.75kg (250mm), 1.8kg (500mm) DIMENSIONS SPECIFICATIONS Unit: mm Metric À>`Õ>Ì ,>}i / £ Range Order No. L W T 250mm 182-501-50 280mm 20mm 10mm { 7 250mm 182-501-60* 280mm 20mm 10mm Ó À>`Õ>ÌÊÌ ViÃÃ\Ê{ 500mm 182-502-50 530mm 30mm 20mm x }iÌÊ>ÀÊÌ ViÃÃ\ÊÓä 500mm 182-502-60* 530mm 30mm 20mm *with English JCSS certificate. Working Standard Scales SERIES 182 FEATURES 182-525-10 • High-precision glass scales 182-523-10 manufactured under Mitutoyo’s leading-edge linear scale 182-522-10 Technical Data production technology. Accuracy (at 20°C): (1.5+2L/1000)µm, • Ideal for checking magnification 182-513-10 L = Measured length (mm) accuracy of profile projectors Glass material: Sodium glass Thermal expansion coefficient: 8.5x10-6/K and microscopes, and the table Graduation: 0.1mm (thickness: 20µm) feeding accuracy of measuring 0.5mm (thickness: 50µm) equipment. 1mm (thickness: 100µm) DIMENSIONS £ä Unit: mm À>`Õ>Ì £ ä°£Ê}À>`Õ>Ì ,i}i Ó°Ç ä°£Ê}À>`Õ>Ì SPECIFICATIONS Ó°x Metric ΰx ÓÓ x Range Order No.