How to Get a Neural Network to Do What You Want?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Training Autoencoders by Alternating Minimization
Under review as a conference paper at ICLR 2018 TRAINING AUTOENCODERS BY ALTERNATING MINI- MIZATION Anonymous authors Paper under double-blind review ABSTRACT We present DANTE, a novel method for training neural networks, in particular autoencoders, using the alternating minimization principle. DANTE provides a distinct perspective in lieu of traditional gradient-based backpropagation techniques commonly used to train deep networks. It utilizes an adaptation of quasi-convex optimization techniques to cast autoencoder training as a bi-quasi-convex optimiza- tion problem. We show that for autoencoder configurations with both differentiable (e.g. sigmoid) and non-differentiable (e.g. ReLU) activation functions, we can perform the alternations very effectively. DANTE effortlessly extends to networks with multiple hidden layers and varying network configurations. In experiments on standard datasets, autoencoders trained using the proposed method were found to be very promising and competitive to traditional backpropagation techniques, both in terms of quality of solution, as well as training speed. 1 INTRODUCTION For much of the recent march of deep learning, gradient-based backpropagation methods, e.g. Stochastic Gradient Descent (SGD) and its variants, have been the mainstay of practitioners. The use of these methods, especially on vast amounts of data, has led to unprecedented progress in several areas of artificial intelligence. On one hand, the intense focus on these techniques has led to an intimate understanding of hardware requirements and code optimizations needed to execute these routines on large datasets in a scalable manner. Today, myriad off-the-shelf and highly optimized packages exist that can churn reasonably large datasets on GPU architectures with relatively mild human involvement and little bootstrap effort. -
Artificial Neural Networks Part 2/3 – Perceptron
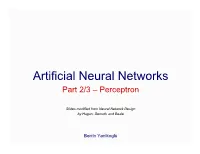
Artificial Neural Networks Part 2/3 – Perceptron Slides modified from Neural Network Design by Hagan, Demuth and Beale Berrin Yanikoglu Perceptron • A single artificial neuron that computes its weighted input and uses a threshold activation function. • It effectively separates the input space into two categories by the hyperplane: wTx + b = 0 Decision Boundary The weight vector is orthogonal to the decision boundary The weight vector points in the direction of the vector which should produce an output of 1 • so that the vectors with the positive output are on the right side of the decision boundary – if w pointed in the opposite direction, the dot products of all input vectors would have the opposite sign – would result in same classification but with opposite labels The bias determines the position of the boundary • solve for wTp+b = 0 using one point on the decision boundary to find b. Two-Input Case + a = hardlim(n) = [1 2]p + -2 w1, 1 = 1 w1, 2 = 2 - Decision Boundary: all points p for which wTp + b =0 If we have the weights and not the bias, we can take a point on the decision boundary, p=[2 0]T, and solving for [1 2]p + b = 0, we see that b=-2. p w wT.p = ||w||||p||Cosθ θ Decision Boundary proj. of p onto w proj. of p onto w T T w p + b = 0 w p = -bœb = ||p||Cosθ 1 1 = wT.p/||w|| • All points on the decision boundary have the same inner product (= -b) with the weight vector • Therefore they have the same projection onto the weight vector; so they must lie on a line orthogonal to the weight vector ADVANCED An Illustrative Example Boolean OR ⎧ 0 ⎫ ⎧ 0 ⎫ ⎧ 1 ⎫ ⎧ 1 ⎫ ⎨p1 = , t1 = 0 ⎬ ⎨p2 = , t2 = 1 ⎬ ⎨p3 = , t3 = 1⎬ ⎨p4 = , t4 = 1⎬ ⎩ 0 ⎭ ⎩ 1 ⎭ ⎩ 0 ⎭ ⎩ 1 ⎭ Given the above input-output pairs (p,t), can you find (manually) the weights of a perceptron to do the job? Boolean OR Solution 1) Pick an admissable decision boundary 2) Weight vector should be orthogonal to the decision boundary. -

Deep Learning Based Computer Generated Face Identification Using
applied sciences Article Deep Learning Based Computer Generated Face Identification Using Convolutional Neural Network L. Minh Dang 1, Syed Ibrahim Hassan 1, Suhyeon Im 1, Jaecheol Lee 2, Sujin Lee 1 and Hyeonjoon Moon 1,* 1 Department of Computer Science and Engineering, Sejong University, Seoul 143-747, Korea; [email protected] (L.M.D.); [email protected] (S.I.H.); [email protected] (S.I.); [email protected] (S.L.) 2 Department of Information Communication Engineering, Sungkyul University, Seoul 143-747, Korea; [email protected] * Correspondence: [email protected] Received: 30 October 2018; Accepted: 10 December 2018; Published: 13 December 2018 Abstract: Generative adversarial networks (GANs) describe an emerging generative model which has made impressive progress in the last few years in generating photorealistic facial images. As the result, it has become more and more difficult to differentiate between computer-generated and real face images, even with the human’s eyes. If the generated images are used with the intent to mislead and deceive readers, it would probably cause severe ethical, moral, and legal issues. Moreover, it is challenging to collect a dataset for computer-generated face identification that is large enough for research purposes because the number of realistic computer-generated images is still limited and scattered on the internet. Thus, a development of a novel decision support system for analyzing and detecting computer-generated face images generated by the GAN network is crucial. In this paper, we propose a customized convolutional neural network, namely CGFace, which is specifically designed for the computer-generated face detection task by customizing the number of convolutional layers, so it performs well in detecting computer-generated face images. -

Artificial Neuron Using Mos2/Graphene Threshold Switching Memristor
University of Central Florida STARS Electronic Theses and Dissertations, 2004-2019 2018 Artificial Neuron using MoS2/Graphene Threshold Switching Memristor Hirokjyoti Kalita University of Central Florida Part of the Electrical and Electronics Commons Find similar works at: https://stars.library.ucf.edu/etd University of Central Florida Libraries http://library.ucf.edu This Masters Thesis (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Electronic Theses and Dissertations, 2004-2019 by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Kalita, Hirokjyoti, "Artificial Neuron using MoS2/Graphene Threshold Switching Memristor" (2018). Electronic Theses and Dissertations, 2004-2019. 5988. https://stars.library.ucf.edu/etd/5988 ARTIFICIAL NEURON USING MoS2/GRAPHENE THRESHOLD SWITCHING MEMRISTOR by HIROKJYOTI KALITA B.Tech. SRM University, 2015 A thesis submitted in partial fulfilment of the requirements for the degree of Master of Science in the Department of Electrical and Computer Engineering in the College of Engineering and Computer Science at the University of Central Florida Orlando, Florida Summer Term 2018 Major Professor: Tania Roy © 2018 Hirokjyoti Kalita ii ABSTRACT With the ever-increasing demand for low power electronics, neuromorphic computing has garnered huge interest in recent times. Implementing neuromorphic computing in hardware will be a severe boost for applications involving complex processes such as pattern recognition. Artificial neurons form a critical part in neuromorphic circuits, and have been realized with complex complementary metal–oxide–semiconductor (CMOS) circuitry in the past. Recently, insulator-to-metal-transition (IMT) materials have been used to realize artificial neurons. -

Matrix Calculus
Appendix D Matrix Calculus From too much study, and from extreme passion, cometh madnesse. Isaac Newton [205, §5] − D.1 Gradient, Directional derivative, Taylor series D.1.1 Gradients Gradient of a differentiable real function f(x) : RK R with respect to its vector argument is defined uniquely in terms of partial derivatives→ ∂f(x) ∂x1 ∂f(x) , ∂x2 RK f(x) . (2053) ∇ . ∈ . ∂f(x) ∂xK while the second-order gradient of the twice differentiable real function with respect to its vector argument is traditionally called the Hessian; 2 2 2 ∂ f(x) ∂ f(x) ∂ f(x) 2 ∂x1 ∂x1∂x2 ··· ∂x1∂xK 2 2 2 ∂ f(x) ∂ f(x) ∂ f(x) 2 2 K f(x) , ∂x2∂x1 ∂x2 ··· ∂x2∂xK S (2054) ∇ . ∈ . .. 2 2 2 ∂ f(x) ∂ f(x) ∂ f(x) 2 ∂xK ∂x1 ∂xK ∂x2 ∂x ··· K interpreted ∂f(x) ∂f(x) 2 ∂ ∂ 2 ∂ f(x) ∂x1 ∂x2 ∂ f(x) = = = (2055) ∂x1∂x2 ³∂x2 ´ ³∂x1 ´ ∂x2∂x1 Dattorro, Convex Optimization Euclidean Distance Geometry, Mεβoo, 2005, v2020.02.29. 599 600 APPENDIX D. MATRIX CALCULUS The gradient of vector-valued function v(x) : R RN on real domain is a row vector → v(x) , ∂v1(x) ∂v2(x) ∂vN (x) RN (2056) ∇ ∂x ∂x ··· ∂x ∈ h i while the second-order gradient is 2 2 2 2 , ∂ v1(x) ∂ v2(x) ∂ vN (x) RN v(x) 2 2 2 (2057) ∇ ∂x ∂x ··· ∂x ∈ h i Gradient of vector-valued function h(x) : RK RN on vector domain is → ∂h1(x) ∂h2(x) ∂hN (x) ∂x1 ∂x1 ··· ∂x1 ∂h1(x) ∂h2(x) ∂hN (x) h(x) , ∂x2 ∂x2 ··· ∂x2 ∇ . -

Using the Modified Back-Propagation Algorithm to Perform Automated Downlink Analysis by Nancy Y
Using The Modified Back-propagation Algorithm To Perform Automated Downlink Analysis by Nancy Y. Xiao Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degrees of Bachelor of Science and Master of Engineering in Electrical Engineering and Computer Science at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June 1996 Copyright Nancy Y. Xiao, 1996. All rights reserved. The author hereby grants to MIT permission to reproduce and distribute publicly paper and electronic copies of this thesis document in whole or in part, and to grant others the right to do so. A uthor ....... ............ Depar -uter Science May 28, 1996 Certified by. rnard C. Lesieutre ;rical Engineering Thesis Supervisor Accepted by.. F.R. Morgenthaler Chairman, Departmental Committee on Graduate Students OF TECH NOLOCG JUN 111996 Eng, Using The Modified Back-propagation Algorithm To Perform Automated Downlink Analysis by Nancy Y. Xiao Submitted to the Department of Electrical Engineering and Computer Science on May 28, 1996, in partial fulfillment of the requirements for the degrees of Bachelor of Science and Master of Engineering in Electrical Engineering and Computer Science Abstract A multi-layer neural network computer program was developed to perform super- vised learning tasks. The weights in the neural network were found using the back- propagation algorithm. Several modifications to this algorithm were also implemented to accelerate error convergence and optimize search procedures. This neural network was used mainly to perform pattern recognition tasks. As an initial test of the system, a controlled classical pattern recognition experiment was conducted using the X and Y coordinates of the data points from two to five possibly overlapping Gaussian distributions, each with a different mean and variance. -

Deep Multiphysics and Particle–Neuron Duality: a Computational Framework Coupling (Discrete) Multiphysics and Deep Learning
applied sciences Article Deep Multiphysics and Particle–Neuron Duality: A Computational Framework Coupling (Discrete) Multiphysics and Deep Learning Alessio Alexiadis School of Chemical Engineering, University of Birmingham, Birmingham B15 2TT, UK; [email protected]; Tel.: +44-(0)-121-414-5305 Received: 11 November 2019; Accepted: 6 December 2019; Published: 9 December 2019 Featured Application: Coupling First-Principle Modelling with Artificial Intelligence. Abstract: There are two common ways of coupling first-principles modelling and machine learning. In one case, data are transferred from the machine-learning algorithm to the first-principles model; in the other, from the first-principles model to the machine-learning algorithm. In both cases, the coupling is in series: the two components remain distinct, and data generated by one model are subsequently fed into the other. Several modelling problems, however, require in-parallel coupling, where the first-principle model and the machine-learning algorithm work together at the same time rather than one after the other. This study introduces deep multiphysics; a computational framework that couples first-principles modelling and machine learning in parallel rather than in series. Deep multiphysics works with particle-based first-principles modelling techniques. It is shown that the mathematical algorithms behind several particle methods and artificial neural networks are similar to the point that can be unified under the notion of particle–neuron duality. This study explains in detail the particle–neuron duality and how deep multiphysics works both theoretically and in practice. A case study, the design of a microfluidic device for separating cell populations with different levels of stiffness, is discussed to achieve this aim. -
Neural Network Architectures and Activation Functions: a Gaussian Process Approach
Fakultät für Informatik Neural Network Architectures and Activation Functions: A Gaussian Process Approach Sebastian Urban Vollständiger Abdruck der von der Fakultät für Informatik der Technischen Universität München zur Erlangung des akademischen Grades eines Doktors der Naturwissenschaften (Dr. rer. nat.) genehmigten Dissertation. Vorsitzender: Prof. Dr. rer. nat. Stephan Günnemann Prüfende der Dissertation: 1. Prof. Dr. Patrick van der Smagt 2. Prof. Dr. rer. nat. Daniel Cremers 3. Prof. Dr. Bernd Bischl, Ludwig-Maximilians-Universität München Die Dissertation wurde am 22.11.2017 bei der Technischen Universtät München eingereicht und durch die Fakultät für Informatik am 14.05.2018 angenommen. Neural Network Architectures and Activation Functions: A Gaussian Process Approach Sebastian Urban Technical University Munich 2017 ii Abstract The success of applying neural networks crucially depends on the network architecture being appropriate for the task. Determining the right architecture is a computationally intensive process, requiring many trials with different candidate architectures. We show that the neural activation function, if allowed to individually change for each neuron, can implicitly control many aspects of the network architecture, such as effective number of layers, effective number of neurons in a layer, skip connections and whether a neuron is additive or multiplicative. Motivated by this observation we propose stochastic, non-parametric activation functions that are fully learnable and individual to each neuron. Complexity and the risk of overfitting are controlled by placing a Gaussian process prior over these functions. The result is the Gaussian process neuron, a probabilistic unit that can be used as the basic building block for probabilistic graphical models that resemble the structure of neural networks. -

Differentiability in Several Variables: Summary of Basic Concepts
DIFFERENTIABILITY IN SEVERAL VARIABLES: SUMMARY OF BASIC CONCEPTS 3 3 1. Partial derivatives If f : R ! R is an arbitrary function and a = (x0; y0; z0) 2 R , then @f f(a + tj) ¡ f(a) f(x ; y + t; z ) ¡ f(x ; y ; z ) (1) (a) := lim = lim 0 0 0 0 0 0 @y t!0 t t!0 t etc.. provided the limit exists. 2 @f f(t;0)¡f(0;0) Example 1. for f : R ! R, @x (0; 0) = limt!0 t . Example 2. Let f : R2 ! R given by ( 2 x y ; (x; y) 6= (0; 0) f(x; y) = x2+y2 0; (x; y) = (0; 0) Then: @f f(t;0)¡f(0;0) 0 ² @x (0; 0) = limt!0 t = limt!0 t = 0 @f f(0;t)¡f(0;0) ² @y (0; 0) = limt!0 t = 0 Note: away from (0; 0), where f is the quotient of differentiable functions (with non-zero denominator) one can apply the usual rules of derivation: @f 2xy(x2 + y2) ¡ 2x3y (x; y) = ; for (x; y) 6= (0; 0) @x (x2 + y2)2 2 2 2. Directional derivatives. If f : R ! R is a map, a = (x0; y0) 2 R and v = ®i + ¯j is a vector in R2, then by definition f(a + tv) ¡ f(a) f(x0 + t®; y0 + t¯) ¡ f(x0; y0) (2) @vf(a) := lim = lim t!0 t t!0 t Example 3. Let f the function from the Example 2 above. Then for v = ®i + ¯j a unit vector (i.e. -

Lipschitz Recurrent Neural Networks
Published as a conference paper at ICLR 2021 LIPSCHITZ RECURRENT NEURAL NETWORKS N. Benjamin Erichson Omri Azencot Alejandro Queiruga ICSI and UC Berkeley Ben-Gurion University Google Research [email protected] [email protected] [email protected] Liam Hodgkinson Michael W. Mahoney ICSI and UC Berkeley ICSI and UC Berkeley [email protected] [email protected] ABSTRACT Viewing recurrent neural networks (RNNs) as continuous-time dynamical sys- tems, we propose a recurrent unit that describes the hidden state’s evolution with two parts: a well-understood linear component plus a Lipschitz nonlinearity. This particular functional form facilitates stability analysis of the long-term behavior of the recurrent unit using tools from nonlinear systems theory. In turn, this en- ables architectural design decisions before experimentation. Sufficient conditions for global stability of the recurrent unit are obtained, motivating a novel scheme for constructing hidden-to-hidden matrices. Our experiments demonstrate that the Lipschitz RNN can outperform existing recurrent units on a range of bench- mark tasks, including computer vision, language modeling and speech prediction tasks. Finally, through Hessian-based analysis we demonstrate that our Lipschitz recurrent unit is more robust with respect to input and parameter perturbations as compared to other continuous-time RNNs. 1 INTRODUCTION Many interesting problems exhibit temporal structures that can be modeled with recurrent neural networks (RNNs), including problems in robotics, system identification, natural language process- ing, and machine learning control. In contrast to feed-forward neural networks, RNNs consist of one or more recurrent units that are designed to have dynamical (recurrent) properties, thereby enabling them to acquire some form of internal memory. -

Neural Networks
School of Computer Science 10-601B Introduction to Machine Learning Neural Networks Readings: Matt Gormley Bishop Ch. 5 Lecture 15 Murphy Ch. 16.5, Ch. 28 October 19, 2016 Mitchell Ch. 4 1 Reminders 2 Outline • Logistic Regression (Recap) • Neural Networks • Backpropagation 3 RECALL: LOGISTIC REGRESSION 4 Using gradient ascent for linear Recall… classifiers Key idea behind today’s lecture: 1. Define a linear classifier (logistic regression) 2. Define an objective function (likelihood) 3. Optimize it with gradient descent to learn parameters 4. Predict the class with highest probability under the model 5 Using gradient ascent for linear Recall… classifiers This decision function isn’t Use a differentiable function differentiable: instead: 1 T pθ(y =1t)= h(t)=sign(θ t) | 1+2tT( θT t) − sign(x) 1 logistic(u) ≡ −u 1+ e 6 Using gradient ascent for linear Recall… classifiers This decision function isn’t Use a differentiable function differentiable: instead: 1 T pθ(y =1t)= h(t)=sign(θ t) | 1+2tT( θT t) − sign(x) 1 logistic(u) ≡ −u 1+ e 7 Recall… Logistic Regression Data: Inputs are continuous vectors of length K. Outputs are discrete. (i) (i) N K = t ,y where t R and y 0, 1 D { }i=1 ∈ ∈ { } Model: Logistic function applied to dot product of parameters with input vector. 1 pθ(y =1t)= | 1+2tT( θT t) − Learning: finds the parameters that minimize some objective function. θ∗ = argmin J(θ) θ Prediction: Output is the most probable class. yˆ = `;Kt pθ(y t) y 0,1 | ∈{ } 8 NEURAL NETWORKS 9 Learning highly non-linear functions f: X à Y l f might be non-linear -

A Connectionist Model Based on Physiological Properties of the Neuron
Proceedings of the International Joint Conference IBERAMIA/SBIA/SBRN 2006 - 1st Workshop on Computational Intelligence (WCI’2006), Ribeir˜aoPreto, Brazil, October 23–28, 2006. CD-ROM. ISBN 85-87837-11-7 A Connectionist Model based on Physiological Properties of the Neuron Alberione Braz da Silva Joao˜ Lu´ıs Garcia Rosa Ceatec, PUC-Campinas Ceatec, PUC-Campinas Campinas, SP, Brazil Campinas, SP, Brazil [email protected] [email protected] Abstract 2 Intraneuron Signaling Recent research on artificial neural network models re- 2.1 The biological neuron and the intra- gards as relevant a new characteristic called biological neuron signaling plausibility or realism. Nevertheless, there is no agreement about this new feature, so some researchers develop their The intraneuron signaling is based on the principle of own visions. Two of these are highlighted here: the first is dynamic polarization, proposed by Ramon´ y Cajal, which related directly to the cerebral cortex biological structure, establishes that “electric signals inside a nervous cell flow and the second focuses the neural features and the signaling only in a direction: from neuron reception (often the den- between neurons. The proposed model departs from the pre- drites and cell body) to the axon trigger zone” [5]. vious existing system models, adopting the standpoint that a Based on physiological evidences of principle of dy- biologically plausible artificial neural network aims to cre- namic polarization the signaling inside the neuron is per- ate a more faithful model concerning the biological struc- formed by four basic elements: Receptive, responsible for ture, properties, and functionalities of the cerebral cortex, input signals; Trigger, responsible for neuron activation not disregarding its computational efficiency.