An Effective Verification Solution for Modern Microprocessors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Development of a Dynamically Extensible Spinnaker Chip Computing Module
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Development of a Dynamically Extensible SpiNNaker Chip Computing Module Rui Emanuel Gonçalves Calado Araújo Master in Electrical and Computers Engineering Supervisor: Jörg Conradt Co-Supervisor: Diamantino Freitas January 27, 2014 Resumo O projeto SpiNNaker desenvolveu uma arquitetura que é capaz de criar um sistema com mais de um milhão de núcleos, com o objetivo de simular mais de um bilhão de neurónios em tempo real biológico. O núcleo deste sistema é o "chip" SpiNNaker, um multiprocessador System-on-Chip com um elevado nível de interligação entre as suas unidades de processamento. Apesar de ser uma plataforma de computação com muito potencial, até para aplicações genéricas, atualmente é ape- nas disponibilizada em configurações fixas e requer uma estação de trabalho, como uma máquina tipo "desktop" ou "laptop" conectada através de uma conexão Ethernet, para a sua inicialização e receber o programa e os dados a processar. No sentido de tirar proveito das capacidades do "chip" SpiNNaker noutras áreas, como por exemplo, na área da robótica, nomeadamente no caso de robots voadores ou de tamanho pequeno, uma nova solução de hardware com software configurável tem de ser projetada de forma a poder selecionar granularmente a quantidade do poder de processamento. Estas novas capacidades per- mitem que a arquitetura SpiNNaker possa ser utilizada em mais aplicações para além daquelas para que foi originalmente projetada. Esta dissertação apresenta um módulo de computação dinamicamente extensível baseado em "chips" SpiNNaker com a finalidade de ultrapassar as limitações supracitadas das máquinas SpiN- Naker atualmente disponíveis. Esta solução consiste numa única placa com um microcontrolador, que emula um "chip" SpiNNaker com uma ligação Ethernet, acessível através de uma porta série e com um "chip" SpiNNaker. -

Wind Rose Data Comes in the Form >200,000 Wind Rose Images
Making Wind Speed and Direction Maps Rich Stromberg Alaska Energy Authority [email protected]/907-771-3053 6/30/2011 Wind Direction Maps 1 Wind rose data comes in the form of >200,000 wind rose images across Alaska 6/30/2011 Wind Direction Maps 2 Wind rose data is quantified in very large Excel™ spreadsheets for each region of the state • Fields: X Y X_1 Y_1 FILE FREQ1 FREQ2 FREQ3 FREQ4 FREQ5 FREQ6 FREQ7 FREQ8 FREQ9 FREQ10 FREQ11 FREQ12 FREQ13 FREQ14 FREQ15 FREQ16 SPEED1 SPEED2 SPEED3 SPEED4 SPEED5 SPEED6 SPEED7 SPEED8 SPEED9 SPEED10 SPEED11 SPEED12 SPEED13 SPEED14 SPEED15 SPEED16 POWER1 POWER2 POWER3 POWER4 POWER5 POWER6 POWER7 POWER8 POWER9 POWER10 POWER11 POWER12 POWER13 POWER14 POWER15 POWER16 WEIBC1 WEIBC2 WEIBC3 WEIBC4 WEIBC5 WEIBC6 WEIBC7 WEIBC8 WEIBC9 WEIBC10 WEIBC11 WEIBC12 WEIBC13 WEIBC14 WEIBC15 WEIBC16 WEIBK1 WEIBK2 WEIBK3 WEIBK4 WEIBK5 WEIBK6 WEIBK7 WEIBK8 WEIBK9 WEIBK10 WEIBK11 WEIBK12 WEIBK13 WEIBK14 WEIBK15 WEIBK16 6/30/2011 Wind Direction Maps 3 Data set is thinned down to wind power density • Fields: X Y • POWER1 POWER2 POWER3 POWER4 POWER5 POWER6 POWER7 POWER8 POWER9 POWER10 POWER11 POWER12 POWER13 POWER14 POWER15 POWER16 • Power1 is the wind power density coming from the north (0 degrees). Power 2 is wind power from 22.5 deg.,…Power 9 is south (180 deg.), etc… 6/30/2011 Wind Direction Maps 4 Spreadsheet calculations X Y POWER1 POWER2 POWER3 POWER4 POWER5 POWER6 POWER7 POWER8 POWER9 POWER10 POWER11 POWER12 POWER13 POWER14 POWER15 POWER16 Max Wind Dir Prim 2nd Wind Dir Sec -132.7365 54.4833 0.643 0.767 1.911 4.083 -

Fax86: an Open-Source FPGA-Accelerated X86 Full-System Emulator
FAx86: An Open-Source FPGA-Accelerated x86 Full-System Emulator by Elias El Ferezli A thesis submitted in conformity with the requirements for the degree of Master of Applied Science (M.A.Sc.) Graduate Department of Electrical and Computer Engineering University of Toronto Copyright c 2011 by Elias El Ferezli Abstract FAx86: An Open-Source FPGA-Accelerated x86 Full-System Emulator Elias El Ferezli Master of Applied Science (M.A.Sc.) Graduate Department of Electrical and Computer Engineering University of Toronto 2011 This thesis presents FAx86, a hardware/software full-system emulator of commodity computer systems using x86 processors. FAx86 is based upon the open-source IA-32 full-system simulator Bochs and is implemented over a single Virtex-5 FPGA. Our first prototype uses an embedded PowerPC to run the software portion of Bochs and off- loads the instruction decoding function to a low-cost hardware decoder since instruction decode was measured to be the most time consuming part of the software-only emulation. Instruction decoding for x86 architectures is non-trivial due to their variable length and instruction encoding format. The decoder requires only 3% of the total LUTs and 5% of the BRAMs of the FPGA's resources making the design feasible to replicate for many- core emulator implementations. FAx86 prototype boots Linux Debian version 2.6 and runs SPEC CPU 2006 benchmarks. FAx86 improves simulation performance over the default Bochs by 5 to 9% depending on the workload. ii Acknowledgements I would like to begin by thanking my supervisor, Professor Andreas Moshovos, for his patient guidance and continuous support throughout this work. -
Power4 Focuses on Memory Bandwidth IBM Confronts IA-64, Says ISA Not Important
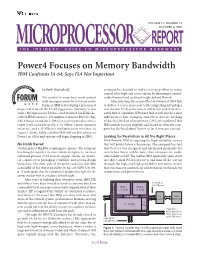
VOLUME 13, NUMBER 13 OCTOBER 6,1999 MICROPROCESSOR REPORT THE INSIDERS’ GUIDE TO MICROPROCESSOR HARDWARE Power4 Focuses on Memory Bandwidth IBM Confronts IA-64, Says ISA Not Important by Keith Diefendorff company has decided to make a last-gasp effort to retain control of its high-end server silicon by throwing its consid- Not content to wrap sheet metal around erable financial and technical weight behind Power4. Intel microprocessors for its future server After investing this much effort in Power4, if IBM fails business, IBM is developing a processor it to deliver a server processor with compelling advantages hopes will fend off the IA-64 juggernaut. Speaking at this over the best IA-64 processors, it will be left with little alter- week’s Microprocessor Forum, chief architect Jim Kahle de- native but to capitulate. If Power4 fails, it will also be a clear scribed IBM’s monster 170-million-transistor Power4 chip, indication to Sun, Compaq, and others that are bucking which boasts two 64-bit 1-GHz five-issue superscalar cores, a IA-64, that the days of proprietary CPUs are numbered. But triple-level cache hierarchy, a 10-GByte/s main-memory IBM intends to resist mightily, and, based on what the com- interface, and a 45-GByte/s multiprocessor interface, as pany has disclosed about Power4 so far, it may just succeed. Figure 1 shows. Kahle said that IBM will see first silicon on Power4 in 1Q00, and systems will begin shipping in 2H01. Looking for Parallelism in All the Right Places With Power4, IBM is targeting the high-reliability servers No Holds Barred that will power future e-businesses. -
NVIDIA CUDA on IBM POWER8: Technical Overview, Software Installation, and Application Development
Redpaper Dino Quintero Wei Li Wainer dos Santos Moschetta Mauricio Faria de Oliveira Alexander Pozdneev NVIDIA CUDA on IBM POWER8: Technical overview, software installation, and application development Overview The exploitation of general-purpose computing on graphics processing units (GPUs) and modern multi-core processors in a single heterogeneous parallel system has proven highly efficient for running several technical computing workloads. This applied to a wide range of areas such as chemistry, bioinformatics, molecular biology, engineering, and big data analytics. Recently launched, the IBM® Power System S824L comes into play to explore the use of the NVIDIA Tesla K40 GPU, combined with the latest IBM POWER8™ processor, providing a unique technology platform for high performance computing. This IBM Redpaper™ publication discusses the installation of the system, and the development of C/C++ and Java applications using the NVIDIA CUDA platform for IBM POWER8. Note: CUDA stands for Compute Unified Device Architecture. It is a parallel computing platform and programming model created by NVIDIA and implemented by the GPUs that they produce. The following topics are covered: Advantages of NVIDIA on POWER8 The IBM Power Systems S824L server Software stack System monitoring Application development Tuning and debugging Application examples © Copyright IBM Corp. 2015. All rights reserved. ibm.com/redbooks 1 Advantages of NVIDIA on POWER8 The IBM and NVIDIA partnership was announced in November 2013, for the purpose of integrating IBM POWER®-based systems with NVIDIA GPUs, and enablement of GPU-accelerated applications and workloads. The goal is to deliver higher performance and better energy efficiency to companies and data centers. This collaboration produced its initial results in 2014 with: The announcement of the first IBM POWER8 system featuring NVIDIA Tesla GPUs (IBM Power Systems™ S824L). -

Openpower AI CERN V1.Pdf
Moore’s Law Processor Technology Firmware / OS Linux Accelerator sSoftware OpenStack Storage Network ... Price/Performance POWER8 2000 2020 DRAM Memory Chips Buffer Power8: Up to 12 Cores, up to 96 Threads L1, L2, L3 + L4 Caches Up to 1 TB per socket https://www.ibm.com/blogs/syst Up to 230 GB/s sustained memory ems/power-systems- openpower-enable- bandwidth acceleration/ System System Memory Memory 115 GB/s 115 GB/s POWER8 POWER8 CPU CPU NVLink NVLink 80 GB/s 80 GB/s P100 P100 P100 P100 GPU GPU GPU GPU GPU GPU GPU GPU Memory Memory Memory Memory GPU PCIe CPU 16 GB/s System bottleneck Graphics System Memory Memory IBM aDVantage: data communication and GPU performance POWER8 + 78 ms Tesla P100+NVLink x86 baseD 170 ms GPU system ImageNet / Alexnet: Minibatch size = 128 ADD: Coherent Accelerator Processor Interface (CAPI) FPGA CAPP PCIe POWER8 Processor ...FPGAs, networking, memory... Typical I/O MoDel Flow Copy or Pin MMIO Notify Poll / Int Copy or Unpin Ret. From DD DD Call Acceleration Source Data Accelerator Completion Result Data Completion Flow with a Coherent MoDel ShareD Mem. ShareD Memory Acceleration Notify Accelerator Completion Focus on Enterprise Scale-Up Focus on Scale-Out and Enterprise Future Technology and Performance DriVen Cost and Acceleration DriVen Partner Chip POWER6 Architecture POWER7 Architecture POWER8 Architecture POWER9 Architecture POWER10 POWER8/9 2007 2008 2010 2012 2014 2016 2017 TBD 2018 - 20 2020+ POWER6 POWER6+ POWER7 POWER7+ POWER8 POWER8 P9 SO P9 SU P9 SO 2 cores 2 cores 8 cores 8 cores 12 cores w/ NVLink -
IBM Powerpc 970 (A.K.A. G5)
IBM PowerPC 970 (a.k.a. G5) Ref 1 David Benham and Yu-Chung Chen UIC – Department of Computer Science CS 466 PPC 970FX overview ● 64-bit RISC ● 58 million transistors ● 512 KB of L2 cache and 96KB of L1 cache ● 90um process with a die size of 65 sq. mm ● Native 32 bit compatibility ● Maximum clock speed of 2.7 Ghz ● SIMD instruction set (Altivec) ● 42 watts @ 1.8 Ghz (1.3 volts) ● Peak data bandwidth of 6.4 GB per second A picture is worth a 2^10 words (approx.) Ref 2 A little history ● PowerPC processor line is a product of the AIM alliance formed in 1991. (Apple, IBM, and Motorola) ● PPC 601 (G1) - 1993 ● PPC 603 (G2) - 1995 ● PPC 750 (G3) - 1997 ● PPC 7400 (G4) - 1999 ● PPC 970 (G5) - 2002 ● AIM alliance dissolved in 2005 Processor Ref 3 Ref 3 Core details ● 16(int)-25(vector) stage pipeline ● Large number of 'in flight' instructions (various stages of execution) - theoretical limit of 215 instructions ● 512 KB L2 cache ● 96 KB L1 cache – 64 KB I-Cache – 32 KB D-Cache Core details continued ● 10 execution units – 2 load/store operations – 2 fixed-point register-register operations – 2 floating-point operations – 1 branch operation – 1 condition register operation – 1 vector permute operation – 1 vector ALU operation ● 32 64 bit general purpose registers, 32 64 bit floating point registers, 32 128 vector registers Pipeline Ref 4 Benchmarks ● SPEC2000 ● BLAST – Bioinformatics ● Amber / jac - Structure biology ● CFD lab code SPEC CPU2000 ● IBM eServer BladeCenter JS20 ● PPC 970 2.2Ghz ● SPECint2000 ● Base: 986 Peak: 1040 ● SPECfp2000 ● Base: 1178 Peak: 1241 ● Dell PowerEdge 1750 Xeon 3.06Ghz ● SPECint2000 ● Base: 1031 Peak: 1067 Apple’s SPEC Results*2 ● SPECfp2000 ● Base: 1030 Peak: 1044 BLAST Ref. -

IBM Power Systems Performance Report Apr 13, 2021
IBM Power Performance Report Power7 to Power10 September 8, 2021 Table of Contents 3 Introduction to Performance of IBM UNIX, IBM i, and Linux Operating System Servers 4 Section 1 – SPEC® CPU Benchmark Performance 4 Section 1a – Linux Multi-user SPEC® CPU2017 Performance (Power10) 4 Section 1b – Linux Multi-user SPEC® CPU2017 Performance (Power9) 4 Section 1c – AIX Multi-user SPEC® CPU2006 Performance (Power7, Power7+, Power8) 5 Section 1d – Linux Multi-user SPEC® CPU2006 Performance (Power7, Power7+, Power8) 6 Section 2 – AIX Multi-user Performance (rPerf) 6 Section 2a – AIX Multi-user Performance (Power8, Power9 and Power10) 9 Section 2b – AIX Multi-user Performance (Power9) in Non-default Processor Power Mode Setting 9 Section 2c – AIX Multi-user Performance (Power7 and Power7+) 13 Section 2d – AIX Capacity Upgrade on Demand Relative Performance Guidelines (Power8) 15 Section 2e – AIX Capacity Upgrade on Demand Relative Performance Guidelines (Power7 and Power7+) 20 Section 3 – CPW Benchmark Performance 19 Section 3a – CPW Benchmark Performance (Power8, Power9 and Power10) 22 Section 3b – CPW Benchmark Performance (Power7 and Power7+) 25 Section 4 – SPECjbb®2015 Benchmark Performance 25 Section 4a – SPECjbb®2015 Benchmark Performance (Power9) 25 Section 4b – SPECjbb®2015 Benchmark Performance (Power8) 25 Section 5 – AIX SAP® Standard Application Benchmark Performance 25 Section 5a – SAP® Sales and Distribution (SD) 2-Tier – AIX (Power7 to Power8) 26 Section 5b – SAP® Sales and Distribution (SD) 2-Tier – Linux on Power (Power7 to Power7+) -

Introduction to the Cell Multiprocessor
Introduction J. A. Kahle M. N. Day to the Cell H. P. Hofstee C. R. Johns multiprocessor T. R. Maeurer D. Shippy This paper provides an introductory overview of the Cell multiprocessor. Cell represents a revolutionary extension of conventional microprocessor architecture and organization. The paper discusses the history of the project, the program objectives and challenges, the design concept, the architecture and programming models, and the implementation. Introduction: History of the project processors in order to provide the required Initial discussion on the collaborative effort to develop computational density and power efficiency. After Cell began with support from CEOs from the Sony several months of architectural discussion and contract and IBM companies: Sony as a content provider and negotiations, the STI (SCEI–Toshiba–IBM) Design IBM as a leading-edge technology and server company. Center was formally opened in Austin, Texas, on Collaboration was initiated among SCEI (Sony March 9, 2001. The STI Design Center represented Computer Entertainment Incorporated), IBM, for a joint investment in design of about $400,000,000. microprocessor development, and Toshiba, as a Separate joint collaborations were also set in place development and high-volume manufacturing technology for process technology development. partner. This led to high-level architectural discussions A number of key elements were employed to drive the among the three companies during the summer of 2000. success of the Cell multiprocessor design. First, a holistic During a critical meeting in Tokyo, it was determined design approach was used, encompassing processor that traditional architectural organizations would not architecture, hardware implementation, system deliver the computational power that SCEI sought structures, and software programming models. -
IBM Power Roadmap
POWER6™ Processor and Systems Jim McInnes [email protected] Compiler Optimization IBM Canada Toronto Software Lab © 2007 IBM Corporation All statements regarding IBM future directions and intent are subject to change or withdrawal without notice and represent goals and objectives only Role .I am a Technical leader in the Compiler Optimization Team . Focal point to the hardware development team . Member of the Power ISA Architecture Board .For each new microarchitecture I . help direct the design toward helpful features . Design and deliver specific compiler optimizations to enable hardware exploitation 2 IBM POWER6 Overview © 2007 IBM Corporation All statements regarding IBM future directions and intent are subject to change or withdrawal without notice and represent goals and objectives only POWER5 Chip Overview High frequency dual-core chip . 8 execution units 2LS, 2FP, 2FX, 1BR, 1CR . 1.9MB on-chip shared L2 – point of coherency, 3 slices . On-chip L3 directory and controller . On-chip memory controller Technology & Chip Stats . 130nm lithography, Cu, SOI . 276M transistors, 389 mm2 . I/Os: 2313 signal, 3057 Power/Gnd 3 IBM POWER6 Overview © 2007 IBM Corporation All statements regarding IBM future directions and intent are subject to change or withdrawal without notice and represent goals and objectives only POWER6 Chip Overview SDU RU Ultra-high frequency dual-core chip IFU FXU . 8 execution units L2 Core0 VMX L2 2LS, 2FP, 2FX, 1BR, 1VMX QUAD LSU FPU QUAD . 2 x 4MB on-chip L2 – point of L3 coherency, 4 quads L2 CNTL CNTL . On-chip L3 directory and controller . Two on-chip memory controllers M FBC GXC M Technology & Chip stats C C . -

Probabilistic Study of End-To-End Constraints in Real-Time Systems Cristian Maxim
Probabilistic study of end-to-end constraints in real-time systems Cristian Maxim To cite this version: Cristian Maxim. Probabilistic study of end-to-end constraints in real-time systems. Systems and Control [cs.SY]. Université Pierre et Marie Curie - Paris VI, 2017. English. NNT : 2017PA066479. tel-02003251 HAL Id: tel-02003251 https://tel.archives-ouvertes.fr/tel-02003251 Submitted on 1 Feb 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. THESE` DE DOCTORAT DE l'UNIVERSITE´ PIERRE ET MARIE CURIE Sp´ecialit´e Informatique Ecole´ doctorale Informatique, T´el´ecommunications et Electronique´ (Paris) Pr´esent´eepar Cristian MAXIM Pour obtenir le grade de DOCTEUR de l'UNIVERSITE´ PIERRE ET MARIE CURIE Sujet de la th`ese: Etude´ probabiliste des contraintes de bout en bout dans les syst`emestemps r´eel soutenue le 11 dec´embre 2017 devant le jury compos´ede : Mme. Liliana CUCU-GROSJEAN Directeur de th`ese M. Benoit TRIQUET Coordinateur Industriel Mme. Christine ROCHANGE Rapporteur M. Thomas NOLTE Rapporteur Mme. Alix MUNIER Examinateur M. Victor JEGU Examinateur M. George LIMA Examinateur M. Sascha UHRIG Examinateur Contents Table of contents iii 1 Introduction1 1.1 General Introduction...........................1 1.1.1 Embedded systems........................2 1.1.2 Real-time domain........................4 1.1.3 Avionics industry.........................9 1.2 Context................................. -
Ramp: Research Accelerator for Multiple Processors
..................................................................................................................................................................................................................................................... RAMP: RESEARCH ACCELERATOR FOR MULTIPLE PROCESSORS ..................................................................................................................................................................................................................................................... THE RAMP PROJECT’S GOAL IS TO ENABLE THE INTENSIVE, MULTIDISCIPLINARY INNOVATION John Wawrzynek THAT THE COMPUTING INDUSTRY WILL NEED TO TACKLE THE PROBLEMS OF PARALLEL David Patterson PROCESSING. RAMP ITSELF IS AN OPEN-SOURCE, COMMUNITY-DEVELOPED, FPGA-BASED University of California, EMULATOR OF PARALLEL ARCHITECTURES. ITS DESIGN FRAMEWORK LETS A LARGE, Berkeley COLLABORATIVE COMMUNITY DEVELOP AND CONTRIBUTE REUSABLE, COMPOSABLE DESIGN Mark Oskin MODULES. THREE COMPLETE DESIGNS—FOR TRANSACTIONAL MEMORY, DISTRIBUTED University of Washington SYSTEMS, AND DISTRIBUTED-SHARED MEMORY—DEMONSTRATE THE PLATFORM’S POTENTIAL. Shih-Lien Lu ...... In 2005, the computer hardware N Prototyping a new architecture in Intel industry took a historic change of direction: hardware takes approximately four The major microprocessor companies all an- years and many millions of dollars, nounced that their future products would even at only research quality. Christoforos Kozyrakis be single-chip multiprocessors, and that N Software