The POWER4 Processor Introduction and Tuning Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Wind Rose Data Comes in the Form >200,000 Wind Rose Images
Making Wind Speed and Direction Maps Rich Stromberg Alaska Energy Authority [email protected]/907-771-3053 6/30/2011 Wind Direction Maps 1 Wind rose data comes in the form of >200,000 wind rose images across Alaska 6/30/2011 Wind Direction Maps 2 Wind rose data is quantified in very large Excel™ spreadsheets for each region of the state • Fields: X Y X_1 Y_1 FILE FREQ1 FREQ2 FREQ3 FREQ4 FREQ5 FREQ6 FREQ7 FREQ8 FREQ9 FREQ10 FREQ11 FREQ12 FREQ13 FREQ14 FREQ15 FREQ16 SPEED1 SPEED2 SPEED3 SPEED4 SPEED5 SPEED6 SPEED7 SPEED8 SPEED9 SPEED10 SPEED11 SPEED12 SPEED13 SPEED14 SPEED15 SPEED16 POWER1 POWER2 POWER3 POWER4 POWER5 POWER6 POWER7 POWER8 POWER9 POWER10 POWER11 POWER12 POWER13 POWER14 POWER15 POWER16 WEIBC1 WEIBC2 WEIBC3 WEIBC4 WEIBC5 WEIBC6 WEIBC7 WEIBC8 WEIBC9 WEIBC10 WEIBC11 WEIBC12 WEIBC13 WEIBC14 WEIBC15 WEIBC16 WEIBK1 WEIBK2 WEIBK3 WEIBK4 WEIBK5 WEIBK6 WEIBK7 WEIBK8 WEIBK9 WEIBK10 WEIBK11 WEIBK12 WEIBK13 WEIBK14 WEIBK15 WEIBK16 6/30/2011 Wind Direction Maps 3 Data set is thinned down to wind power density • Fields: X Y • POWER1 POWER2 POWER3 POWER4 POWER5 POWER6 POWER7 POWER8 POWER9 POWER10 POWER11 POWER12 POWER13 POWER14 POWER15 POWER16 • Power1 is the wind power density coming from the north (0 degrees). Power 2 is wind power from 22.5 deg.,…Power 9 is south (180 deg.), etc… 6/30/2011 Wind Direction Maps 4 Spreadsheet calculations X Y POWER1 POWER2 POWER3 POWER4 POWER5 POWER6 POWER7 POWER8 POWER9 POWER10 POWER11 POWER12 POWER13 POWER14 POWER15 POWER16 Max Wind Dir Prim 2nd Wind Dir Sec -132.7365 54.4833 0.643 0.767 1.911 4.083 -

IBM Iseries Universal Connection for Electronic Support and Services
IBM iSeries Universal Connection for Electronic Support and Services Explains the supported functions with Universal Connection Shows how to install, tailor, and configure Universal Connection Helps you determine communications problems Masahiko Hamada Michael S Alexander Makoto Kikuchi ibm.com/redbooks International Technical Support Organization SG24-6224-00 iSeries Universal Connection for Electronic Support and Services August 2001 Take Note! Before using this information and the product it supports, be sure to read the general information in Appendix A, “Special notices” on page 209. First Edition (August 2001) This edition applies to Version 5 Release 1 of OS/400. Comments may be addressed to: IBM Corporation, International Technical Support Organization Dept. JLU Building 107-2 3605 Highway 52N Rochester, Minnesota 55901-7829 When you send information to IBM, you grant IBM a non-exclusive right to use or distribute the information in any way it believes appropriate without incurring any obligation to you. © Copyright International Business Machines Corporation 2001. All rights reserved. Note to U.S Government Users - Documentation related to restricted rights - Use, duplication or disclosure is subject to restrictions set forth in GSA ADP Schedule Contract with IBM Corp. Contents Preface . vii The team that wrote this redbook . vii Comments welcome . viii Chapter 1. Extreme Support Personalized (ESP) . .1 1.1 Introduction to ESP . .1 1.1.1 Customer Care Advantage . .1 1.1.2 ESP approach. .3 1.1.3 Benefits for customers. .4 1.2 Available applications in electronic support . .5 1.2.1 Electronic Customer Support (ECS) connection . .5 1.2.2 Service Agent . .6 1.2.3 Consolidated inventory collection using Management Central . -

Caching Basics
Introduction Why memory subsystem design is important • CPU speeds increase 25%-30% per year • DRAM speeds increase 2%-11% per year Autumn 2006 CSE P548 - Memory Hierarchy 1 Memory Hierarchy Levels of memory with different sizes & speeds • close to the CPU: small, fast access • close to memory: large, slow access Memory hierarchies improve performance • caches: demand-driven storage • principal of locality of reference temporal: a referenced word will be referenced again soon spatial: words near a reference word will be referenced soon • speed/size trade-off in technology ⇒ fast access for most references First Cache: IBM 360/85 in the late ‘60s Autumn 2006 CSE P548 - Memory Hierarchy 2 1 Cache Organization Block: • # bytes associated with 1 tag • usually the # bytes transferred on a memory request Set: the blocks that can be accessed with the same index bits Associativity: the number of blocks in a set • direct mapped • set associative • fully associative Size: # bytes of data How do you calculate this? Autumn 2006 CSE P548 - Memory Hierarchy 3 Logical Diagram of a Cache Autumn 2006 CSE P548 - Memory Hierarchy 4 2 Logical Diagram of a Set-associative Cache Autumn 2006 CSE P548 - Memory Hierarchy 5 Accessing a Cache General formulas • number of index bits = log2(cache size / block size) (for a direct mapped cache) • number of index bits = log2(cache size /( block size * associativity)) (for a set-associative cache) Autumn 2006 CSE P548 - Memory Hierarchy 6 3 Design Tradeoffs Cache size the bigger the cache, + the higher the hit ratio -

45-Year CPU Evolution: One Law and Two Equations
45-year CPU evolution: one law and two equations Daniel Etiemble LRI-CNRS University Paris Sud Orsay, France [email protected] Abstract— Moore’s law and two equations allow to explain the a) IC is the instruction count. main trends of CPU evolution since MOS technologies have been b) CPI is the clock cycles per instruction and IPC = 1/CPI is the used to implement microprocessors. Instruction count per clock cycle. c) Tc is the clock cycle time and F=1/Tc is the clock frequency. Keywords—Moore’s law, execution time, CM0S power dissipation. The Power dissipation of CMOS circuits is the second I. INTRODUCTION equation (2). CMOS power dissipation is decomposed into static and dynamic powers. For dynamic power, Vdd is the power A new era started when MOS technologies were used to supply, F is the clock frequency, ΣCi is the sum of gate and build microprocessors. After pMOS (Intel 4004 in 1971) and interconnection capacitances and α is the average percentage of nMOS (Intel 8080 in 1974), CMOS became quickly the leading switching capacitances: α is the activity factor of the overall technology, used by Intel since 1985 with 80386 CPU. circuit MOS technologies obey an empirical law, stated in 1965 and 2 Pd = Pdstatic + α x ΣCi x Vdd x F (2) known as Moore’s law: the number of transistors integrated on a chip doubles every N months. Fig. 1 presents the evolution for II. CONSEQUENCES OF MOORE LAW DRAM memories, processors (MPU) and three types of read- only memories [1]. The growth rate decreases with years, from A. -

Copyrighted Material
CHAPTER 1 MULTI- AND MANY-CORES, ARCHITECTURAL OVERVIEW FOR PROGRAMMERS Lasse Natvig, Alexandru Iordan, Mujahed Eleyat, Magnus Jahre and Jorn Amundsen 1.1 INTRODUCTION 1.1.1 Fundamental Techniques Parallelism hasCOPYRIGHTED been used since the early days of computing MATERIAL to enhance performance. From the first computers to the most modern sequential processors (also called uni- processors), the main concepts introduced by von Neumann [20] are still in use. How- ever, the ever-increasing demand for computing performance has pushed computer architects toward implementing different techniques of parallelism. The von Neu- mann architecture was initially a sequential machine operating on scalar data with bit-serial operations [20]. Word-parallel operations were made possible by using more complex logic that could perform binary operations in parallel on all the bits in a computer word, and it was just the start of an adventure of innovations in parallel computer architectures. Programming Multicore and Many-core Computing Systems, 3 First Edition. Edited by Sabri Pllana and Fatos Xhafa. © 2017 John Wiley & Sons, Inc. Published 2017 by John Wiley & Sons, Inc. 4 MULTI- AND MANY-CORES, ARCHITECTURAL OVERVIEW FOR PROGRAMMERS Prefetching is a 'look-ahead technique' that was introduced quite early and is a way of parallelism that is used at several levels and in different components of a computer today. Both data and instructions are very often accessed sequentially. Therefore, when accessing an element (instruction or data) at address k, an auto- matic access to address k+1 will bring the element to where it is needed before it is accessed and thus eliminates or reduces waiting time. -
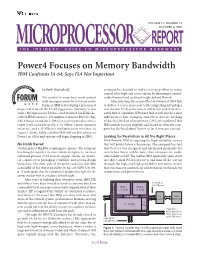
Power4 Focuses on Memory Bandwidth IBM Confronts IA-64, Says ISA Not Important
VOLUME 13, NUMBER 13 OCTOBER 6,1999 MICROPROCESSOR REPORT THE INSIDERS’ GUIDE TO MICROPROCESSOR HARDWARE Power4 Focuses on Memory Bandwidth IBM Confronts IA-64, Says ISA Not Important by Keith Diefendorff company has decided to make a last-gasp effort to retain control of its high-end server silicon by throwing its consid- Not content to wrap sheet metal around erable financial and technical weight behind Power4. Intel microprocessors for its future server After investing this much effort in Power4, if IBM fails business, IBM is developing a processor it to deliver a server processor with compelling advantages hopes will fend off the IA-64 juggernaut. Speaking at this over the best IA-64 processors, it will be left with little alter- week’s Microprocessor Forum, chief architect Jim Kahle de- native but to capitulate. If Power4 fails, it will also be a clear scribed IBM’s monster 170-million-transistor Power4 chip, indication to Sun, Compaq, and others that are bucking which boasts two 64-bit 1-GHz five-issue superscalar cores, a IA-64, that the days of proprietary CPUs are numbered. But triple-level cache hierarchy, a 10-GByte/s main-memory IBM intends to resist mightily, and, based on what the com- interface, and a 45-GByte/s multiprocessor interface, as pany has disclosed about Power4 so far, it may just succeed. Figure 1 shows. Kahle said that IBM will see first silicon on Power4 in 1Q00, and systems will begin shipping in 2H01. Looking for Parallelism in All the Right Places With Power4, IBM is targeting the high-reliability servers No Holds Barred that will power future e-businesses. -
Shared Memory Multiprocessors
Shared Memory Multiprocessors Logical design and software interactions 1 Shared Memory Multiprocessors Symmetric Multiprocessors (SMPs) • Symmetric access to all of main memory from any processor Dominate the server market • Building blocks for larger systems; arriving to desktop Attractive as throughput servers and for parallel programs • Fine-grain resource sharing • Uniform access via loads/stores • Automatic data movement and coherent replication in caches • Useful for operating system too Normal uniprocessor mechanisms to access data (reads and writes) • Key is extension of memory hierarchy to support multiple processors 2 Supporting Programming Models Message passing Programming models Compilation Multiprogramming or library Communication abstraction User/system boundary Shared address space Operating systems support Hardware/software boundary Communication hardware Physical communication medium • Address translation and protection in hardware (hardware SAS) • Message passing using shared memory buffers – can be very high performance since no OS involvement necessary • Focus here on supporting coherent shared address space 3 Natural Extensions of Memory System P1 Pn Switch P1 Pn (Interleaved) First-level $ $ $ Bus (Interleaved) Main memory Mem I/O devices (a) Shared cache (b) Bus-based shared memory P1 Pn P1 Pn $ $ $ $ Mem Mem Interconnection network Interconnection network Mem Mem (c) Dancehall (d) Distributed-memory 4 Caches and Cache Coherence Caches play key role in all cases • Reduce average data access time • Reduce bandwidth -

Introduction to Multi-Threading and Vectorization Matti Kortelainen Larsoft Workshop 2019 25 June 2019 Outline
Introduction to multi-threading and vectorization Matti Kortelainen LArSoft Workshop 2019 25 June 2019 Outline Broad introductory overview: • Why multithread? • What is a thread? • Some threading models – std::thread – OpenMP (fork-join) – Intel Threading Building Blocks (TBB) (tasks) • Race condition, critical region, mutual exclusion, deadlock • Vectorization (SIMD) 2 6/25/19 Matti Kortelainen | Introduction to multi-threading and vectorization Motivations for multithreading Image courtesy of K. Rupp 3 6/25/19 Matti Kortelainen | Introduction to multi-threading and vectorization Motivations for multithreading • One process on a node: speedups from parallelizing parts of the programs – Any problem can get speedup if the threads can cooperate on • same core (sharing L1 cache) • L2 cache (may be shared among small number of cores) • Fully loaded node: save memory and other resources – Threads can share objects -> N threads can use significantly less memory than N processes • If smallest chunk of data is so big that only one fits in memory at a time, is there any other option? 4 6/25/19 Matti Kortelainen | Introduction to multi-threading and vectorization What is a (software) thread? (in POSIX/Linux) • “Smallest sequence of programmed instructions that can be managed independently by a scheduler” [Wikipedia] • A thread has its own – Program counter – Registers – Stack – Thread-local memory (better to avoid in general) • Threads of a process share everything else, e.g. – Program code, constants – Heap memory – Network connections – File handles -

Hierarchical Roofline Analysis for Gpus: Accelerating Performance
Hierarchical Roofline Analysis for GPUs: Accelerating Performance Optimization for the NERSC-9 Perlmutter System Charlene Yang, Thorsten Kurth Samuel Williams National Energy Research Scientific Computing Center Computational Research Division Lawrence Berkeley National Laboratory Lawrence Berkeley National Laboratory Berkeley, CA 94720, USA Berkeley, CA 94720, USA fcjyang, [email protected] [email protected] Abstract—The Roofline performance model provides an Performance (GFLOP/s) is bound by: intuitive and insightful approach to identifying performance bottlenecks and guiding performance optimization. In prepa- Peak GFLOP/s GFLOP/s ≤ min (1) ration for the next-generation supercomputer Perlmutter at Peak GB/s × Arithmetic Intensity NERSC, this paper presents a methodology to construct a hi- erarchical Roofline on NVIDIA GPUs and extend it to support which produces the traditional Roofline formulation when reduced precision and Tensor Cores. The hierarchical Roofline incorporates L1, L2, device memory and system memory plotted on a log-log plot. bandwidths into one single figure, and it offers more profound Previously, the Roofline model was expanded to support insights into performance analysis than the traditional DRAM- the full memory hierarchy [2], [3] by adding additional band- only Roofline. We use our Roofline methodology to analyze width “ceilings”. Similarly, additional ceilings beneath the three proxy applications: GPP from BerkeleyGW, HPGMG Roofline can be added to represent performance bottlenecks from AMReX, and conv2d from TensorFlow. In so doing, we demonstrate the ability of our methodology to readily arising from lack of vectorization or the failure to exploit understand various aspects of performance and performance fused multiply-add (FMA) instructions. bottlenecks on NVIDIA GPUs and motivate code optimizations. -

From Blue Gene to Cell Power.Org Moscow, JSCC Technical Day November 30, 2005
IBM eServer pSeries™ From Blue Gene to Cell Power.org Moscow, JSCC Technical Day November 30, 2005 Dr. Luigi Brochard IBM Distinguished Engineer Deep Computing Architect [email protected] © 2004 IBM Corporation IBM eServer pSeries™ Technology Trends As frequency increase is limited due to power limitation Dual core is a way to : 2 x Peak Performance per chip (and per cycle) But at the expense of frequency (around 20% down) Another way is to increase Flop/cycle © 2004 IBM Corporation IBM eServer pSeries™ IBM innovations POWER : FMA in 1990 with POWER: 2 Flop/cycle/chip Double FMA in 1992 with POWER2 : 4 Flop/cycle/chip Dual core in 2001 with POWER4: 8 Flop/cycle/chip Quadruple core modules in Oct 2005 with POWER5: 16 Flop/cycle/module PowerPC: VMX in 2003 with ppc970FX : 8 Flops/cycle/core, 32bit only Dual VMX+ FMA with pp970MP in 1Q06 Blue Gene: Low frequency , system on a chip, tight integration of thousands of cpus Cell : 8 SIMD units and a ppc970 core on a chip : 64 Flop/cycle/chip © 2004 IBM Corporation IBM eServer pSeries™ Technology Trends As needs diversify, systems are heterogeneous and distributed GRID technologies are an essential part to create cooperative environments based on standards © 2004 IBM Corporation IBM eServer pSeries™ IBM innovations IBM is : a sponsor of Globus Alliances contributing to Globus Tool Kit open souce a founding member of Globus Consortium IBM is extending its products Global file systems : – Multi platform and multi cluster GPFS Meta schedulers : – Multi platform -
IBM AIX Version 6.1 Differences Guide
Front cover IBM AIX Version 6.1 Differences Guide AIX - The industrial strength UNIX operating system AIX Version 6.1 enhancements explained An expert’s guide to the new release Roman Aleksic Ismael "Numi" Castillo Rosa Fernandez Armin Röll Nobuhiko Watanabe ibm.com/redbooks International Technical Support Organization IBM AIX Version 6.1 Differences Guide March 2008 SG24-7559-00 Note: Before using this information and the product it supports, read the information in “Notices” on page xvii. First Edition (March 2008) This edition applies to AIX Version 6.1, program number 5765-G62. © Copyright International Business Machines Corporation 2007, 2008. All rights reserved. Note to U.S. Government Users Restricted Rights -- Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents Figures . xi Tables . xiii Notices . xvii Trademarks . xviii Preface . xix The team that wrote this book . xix Become a published author . xxi Comments welcome. xxi Chapter 1. Application development and system debug. 1 1.1 Transport independent RPC library. 2 1.2 AIX tracing facilities review . 3 1.3 POSIX threads tracing. 5 1.3.1 POSIX tracing overview . 6 1.3.2 Trace event definition . 8 1.3.3 Trace stream definition . 13 1.3.4 AIX implementation overview . 20 1.4 ProbeVue . 21 1.4.1 ProbeVue terminology. 23 1.4.2 Vue programming language . 24 1.4.3 The probevue command . 25 1.4.4 The probevctrl command . 25 1.4.5 Vue: an overview. 25 1.4.6 ProbeVue dynamic tracing example . 31 Chapter 2. File systems and storage. 35 2.1 Disabling JFS2 logging . -
IBM Powerpc 970 (A.K.A. G5)
IBM PowerPC 970 (a.k.a. G5) Ref 1 David Benham and Yu-Chung Chen UIC – Department of Computer Science CS 466 PPC 970FX overview ● 64-bit RISC ● 58 million transistors ● 512 KB of L2 cache and 96KB of L1 cache ● 90um process with a die size of 65 sq. mm ● Native 32 bit compatibility ● Maximum clock speed of 2.7 Ghz ● SIMD instruction set (Altivec) ● 42 watts @ 1.8 Ghz (1.3 volts) ● Peak data bandwidth of 6.4 GB per second A picture is worth a 2^10 words (approx.) Ref 2 A little history ● PowerPC processor line is a product of the AIM alliance formed in 1991. (Apple, IBM, and Motorola) ● PPC 601 (G1) - 1993 ● PPC 603 (G2) - 1995 ● PPC 750 (G3) - 1997 ● PPC 7400 (G4) - 1999 ● PPC 970 (G5) - 2002 ● AIM alliance dissolved in 2005 Processor Ref 3 Ref 3 Core details ● 16(int)-25(vector) stage pipeline ● Large number of 'in flight' instructions (various stages of execution) - theoretical limit of 215 instructions ● 512 KB L2 cache ● 96 KB L1 cache – 64 KB I-Cache – 32 KB D-Cache Core details continued ● 10 execution units – 2 load/store operations – 2 fixed-point register-register operations – 2 floating-point operations – 1 branch operation – 1 condition register operation – 1 vector permute operation – 1 vector ALU operation ● 32 64 bit general purpose registers, 32 64 bit floating point registers, 32 128 vector registers Pipeline Ref 4 Benchmarks ● SPEC2000 ● BLAST – Bioinformatics ● Amber / jac - Structure biology ● CFD lab code SPEC CPU2000 ● IBM eServer BladeCenter JS20 ● PPC 970 2.2Ghz ● SPECint2000 ● Base: 986 Peak: 1040 ● SPECfp2000 ● Base: 1178 Peak: 1241 ● Dell PowerEdge 1750 Xeon 3.06Ghz ● SPECint2000 ● Base: 1031 Peak: 1067 Apple’s SPEC Results*2 ● SPECfp2000 ● Base: 1030 Peak: 1044 BLAST Ref.