Quadrilateral Meshes for Pslgs 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Studies on Kernels of Simple Polygons
UNLV Theses, Dissertations, Professional Papers, and Capstones 5-1-2020 Studies on Kernels of Simple Polygons Jason Mark Follow this and additional works at: https://digitalscholarship.unlv.edu/thesesdissertations Part of the Computer Sciences Commons Repository Citation Mark, Jason, "Studies on Kernels of Simple Polygons" (2020). UNLV Theses, Dissertations, Professional Papers, and Capstones. 3923. http://dx.doi.org/10.34917/19412121 This Thesis is protected by copyright and/or related rights. It has been brought to you by Digital Scholarship@UNLV with permission from the rights-holder(s). You are free to use this Thesis in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you need to obtain permission from the rights-holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/ or on the work itself. This Thesis has been accepted for inclusion in UNLV Theses, Dissertations, Professional Papers, and Capstones by an authorized administrator of Digital Scholarship@UNLV. For more information, please contact [email protected]. STUDIES ON KERNELS OF SIMPLE POLYGONS By Jason A. Mark Bachelor of Science - Computer Science University of Nevada, Las Vegas 2004 A thesis submitted in partial fulfillment of the requirements for the Master of Science - Computer Science Department of Computer Science Howard R. Hughes College of Engineering The Graduate College University of Nevada, Las Vegas May 2020 © Jason A. Mark, 2020 All Rights Reserved Thesis Approval The Graduate College The University of Nevada, Las Vegas April 2, 2020 This thesis prepared by Jason A. -

Polygon Review and Puzzlers in the Above, Those Are Names to the Polygons: Fill in the Blank Parts. Names: Number of Sides
Polygon review and puzzlers ÆReview to the classification of polygons: Is it a Polygon? Polygons are 2-dimensional shapes. They are made of straight lines, and the shape is "closed" (all the lines connect up). Polygon Not a Polygon Not a Polygon (straight sides) (has a curve) (open, not closed) Regular polygons have equal length sides and equal interior angles. Polygons are named according to their number of sides. Name of Degree of Degree of triangle total angles regular angles Triangle 180 60 In the above, those are names to the polygons: Quadrilateral 360 90 fill in the blank parts. Pentagon Hexagon Heptagon 900 129 Names: number of sides: Octagon Nonagon hendecagon, 11 dodecagon, _____________ Decagon 1440 144 tetradecagon, 13 hexadecagon, 15 Do you see a pattern in the calculation of the heptadecagon, _____________ total degree of angles of the polygon? octadecagon, _____________ --- (n -2) x 180° enneadecagon, _____________ icosagon 20 pentadecagon, _____________ These summation of angles rules, also apply to the irregular polygons, try it out yourself !!! A point where two or more straight lines meet. Corner. Example: a corner of a polygon (2D) or of a polyhedron (3D) as shown. The plural of vertex is "vertices” Test them out yourself, by drawing diagonals on the polygons. Here are some fun polygon riddles; could you come up with the answer? Geometry polygon riddles I: My first is in shape and also in space; My second is in line and also in place; My third is in point and also in line; My fourth in operation but not in sign; My fifth is in angle but not in degree; My sixth is in glide but not symmetry; Geometry polygon riddles II: I am a polygon all my angles have the same measure all my five sides have the same measure, what general shape am I? Geometry polygon riddles III: I am a polygon. -

Properties of N-Sided Regular Polygons
PROPERTIES OF N-SIDED REGULAR POLYGONS When students are first exposed to regular polygons in middle school, they learn their properties by looking at individual examples such as the equilateral triangles(n=3), squares(n=4), and hexagons(n=6). A generalization is usually not given, although it would be straight forward to do so with just a min imum of trigonometry and algebra. It also would help students by showing how one obtains generalization in mathematics. We show here how to carry out such a generalization for regular polynomials of side length s. Our starting point is the following schematic of an n sided polygon- We see from the figure that any regular n sided polygon can be constructed by looking at n isosceles triangles whose base angles are θ=(1-2/n)(π/2) since the vertex angle of the triangle is just ψ=2π/n, when expressed in radians. The area of the grey triangle in the above figure is- 2 2 ATr=sh/2=(s/2) tan(θ)=(s/2) tan[(1-2/n)(π/2)] so that the total area of any n sided regular convex polygon will be nATr, , with s again being the side-length. With this generalized form we can construct the following table for some of the better known regular polygons- Name Number of Base Angle, Non-Dimensional 2 sides, n θ=(π/2)(1-2/n) Area, 4nATr/s =tan(θ) Triangle 3 π/6=30º 1/sqrt(3) Square 4 π/4=45º 1 Pentagon 5 3π/10=54º sqrt(15+20φ) Hexagon 6 π/3=60º sqrt(3) Octagon 8 3π/8=67.5º 1+sqrt(2) Decagon 10 2π/5=72º 10sqrt(3+4φ) Dodecagon 12 5π/12=75º 144[2+sqrt(3)] Icosagon 20 9π/20=81º 20[2φ+sqrt(3+4φ)] Here φ=[1+sqrt(5)]/2=1.618033989… is the well known Golden Ratio. -

Simple Polygons Scribe: Michael Goldwasser
CS268: Geometric Algorithms Handout #5 Design and Analysis Original Handout #15 Stanford University Tuesday, 25 February 1992 Original Lecture #6: 28 January 1991 Topics: Triangulating Simple Polygons Scribe: Michael Goldwasser Algorithms for triangulating polygons are important tools throughout computa- tional geometry. Many problems involving polygons are simplified by partitioning the complex polygon into triangles, and then working with the individual triangles. The applications of such algorithms are well documented in papers involving visibility, motion planning, and computer graphics. The following notes give an introduction to triangulations and many related definitions and basic lemmas. Most of the definitions are based on a simple polygon, P, containing n edges, and hence n vertices. However, many of the definitions and results can be extended to a general arrangement of n line segments. 1 Diagonals Definition 1. Given a simple polygon, P, a diagonal is a line segment between two non-adjacent vertices that lies entirely within the interior of the polygon. Lemma 2. Every simple polygon with jPj > 3 contains a diagonal. Proof: Consider some vertex v. If v has a diagonal, it’s party time. If not then the only vertices visible from v are its neighbors. Therefore v must see some single edge beyond its neighbors that entirely spans the sector of visibility, and therefore v must be a convex vertex. Now consider the two neighbors of v. Since jPj > 3, these cannot be neighbors of each other, however they must be visible from each other because of the above situation, and thus the segment connecting them is indeed a diagonal. -
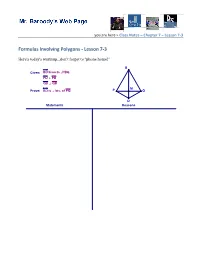
Formulas Involving Polygons - Lesson 7-3
you are here > Class Notes – Chapter 7 – Lesson 7-3 Formulas Involving Polygons - Lesson 7-3 Here’s today’s warmup…don’t forget to “phone home!” B Given: BD bisects ∠PBQ PD ⊥ PB QD ⊥ QB M Prove: BD is ⊥ bis. of PQ P Q D Statements Reasons Honors Geometry Notes Today, we started by learning how polygons are classified by their number of sides...you should already know a lot of these - just make sure to memorize the ones you don't know!! Sides Name 3 Triangle 4 Quadrilateral 5 Pentagon 6 Hexagon 7 Heptagon 8 Octagon 9 Nonagon 10 Decagon 11 Undecagon 12 Dodecagon 13 Tridecagon 14 Tetradecagon 15 Pentadecagon 16 Hexadecagon 17 Heptadecagon 18 Octadecagon 19 Enneadecagon 20 Icosagon n n-gon Baroody Page 2 of 6 Honors Geometry Notes Next, let’s look at the diagonals of polygons with different numbers of sides. By drawing as many diagonals as we could from one diagonal, you should be able to see a pattern...we can make n-2 triangles in a n-sided polygon. Given this information and the fact that the sum of the interior angles of a polygon is 180°, we can come up with a theorem that helps us to figure out the sum of the measures of the interior angles of any n-sided polygon! Baroody Page 3 of 6 Honors Geometry Notes Next, let’s look at exterior angles in a polygon. First, consider the exterior angles of a pentagon as shown below: Note that the sum of the exterior angles is 360°. -

Geometric Constructions of Regular Polygons and Applications to Trigonometry Introduction
Geometric Constructions of Regular Polygons and Applications to Trigonometry José Gilvan de Oliveira, Moacir Rosado Filho, Domingos Sávio Valério Silva Abstract: In this paper, constructions of regular pentagon and decagon, and the calculation of the main trigonometric ratios of the corresponding central angles are approached. In this way, for didactic purposes, it is intended to show the reader that it is possible to broaden the study of Trigonometry by addressing new applications and exercises, for example, with angles 18°, 36° and 72°. It is also considered constructions of other regular polygons and a relation to a construction of the regular icosahedron. Introduction The main objective of this paper is to approach regular pentagon and decagon constructions, together with the calculation of the main trigonometric ratios of the corresponding central angles. In textbooks, examples and exercises involving trigonometric ratios are usually restricted to so-called notable arcs of angles 30°, 45° and 60°. Although these angles are not the main purpose of this article, they will be addressed because the ingredients used in these cases are exactly the same as those we will use to build the regular pentagon and decagon. The difference to the construction of these last two is restricted only to the number of steps required throughout the construction process. By doing so, we intend to show the reader that it is possible to broaden the study of Trigonometry by addressing new applications and exercises, for example, with angles 18°, 36° and 72°. The ingredients used in the text are those found in Plane Geometry and are very few, restricted to intersections of lines and circumferences, properties of triangles, and Pythagorean Theorem. -

Maximum-Area Rectangles in a Simple Polygon∗
Maximum-Area Rectangles in a Simple Polygon∗ Yujin Choiy Seungjun Leez Hee-Kap Ahnz Abstract We study the problem of finding maximum-area rectangles contained in a polygon in the plane. There has been a fair amount of work for this problem when the rectangles have to be axis-aligned or when the polygon is convex. We consider this problem in a simple polygon with n vertices, possibly with holes, and with no restriction on the orientation of the rectangles. We present an algorithm that computes a maximum-area rectangle in O(n3 log n) time using O(kn2) space, where k is the number of reflex vertices of P . Our algorithm can report all maximum-area rectangles in the same time using O(n3) space. We also present a simple algorithm that finds a maximum-area rectangle contained in a convex polygon with n vertices in O(n3) time using O(n) space. 1 Introduction Computing a largest figure of a certain prescribed shape contained in a container is a fundamental and important optimization problem in pattern recognition, computer vision and computational geometry. There has been a fair amount of work for finding rectangles of maximum area contained in a convex polygon P with n vertices in the plane. Amenta showed that an axis-aligned rectangle of maximum area can be found in linear time by phrasing it as a convex programming problem [3]. Assuming that the vertices are given in order along the boundary of P , stored in an array or balanced binary search tree in memory, Fischer and Höffgen gave O(log2 n)-time algorithm for finding an axis-aligned rectangle of maximum area contained in P [9]. -
Parallelogram Rhombus Nonagon Hexagon Icosagon Tetrakaidecagon Hexakaidecagon Quadrilateral Ellipse Scalene T
Call List parallelogram rhombus nonagon hexagon icosagon tetrakaidecagon hexakaidecagon quadrilateral ellipse scalene triangle square rectangle hendecagon pentagon dodecagon decagon trapezium / trapezoid right triangle equilateral triangle circle octagon heptagon isosceles triangle pentadecagon triskaidecagon Created using www.BingoCardPrinter.com B I N G O parallelogram tetrakaidecagon square dodecagon circle rhombus hexakaidecagon rectangle decagon octagon Free trapezium / nonagon quadrilateral heptagon Space trapezoid right isosceles hexagon hendecagon ellipse triangle triangle scalene equilateral icosagon pentagon pentadecagon triangle triangle Created using www.BingoCardPrinter.com B I N G O pentagon rectangle pentadecagon triskaidecagon hexakaidecagon equilateral scalene nonagon parallelogram circle triangle triangle isosceles Free trapezium / octagon triangle Space square trapezoid ellipse heptagon rhombus tetrakaidecagon icosagon right decagon hendecagon dodecagon hexagon triangle Created using www.BingoCardPrinter.com B I N G O right decagon triskaidecagon hendecagon dodecagon triangle trapezium / scalene pentagon square trapezoid triangle circle Free tetrakaidecagon octagon quadrilateral ellipse Space isosceles parallelogram hexagon hexakaidecagon nonagon triangle equilateral pentadecagon rectangle icosagon heptagon triangle Created using www.BingoCardPrinter.com B I N G O equilateral trapezium / pentagon pentadecagon dodecagon triangle trapezoid rectangle rhombus quadrilateral nonagon octagon isosceles Free scalene hendecagon -
University of Houston – Math Contest Project Problem, 2012 Simple Equilateral Polygons and Regular Polygonal Wheels School
University of Houston – Math Contest Project Problem, 2012 Simple Equilateral Polygons and Regular Polygonal Wheels School Name: _____________________________________ Team Members The Project is due at 8:30am (during onsite registration) on the day of the contest. Each project will be judged for precision, presentation, and creativity. Place the team solution in a folder with this page as the cover page, a table of contents, and the solutions. Solve as many of the problems as possible. A polygon is said to be simple if its boundary does not cross itself. A polygon is equilateral if all of its sides have the same length. The sides of a polygon are line segments joining particular vertices of the polygon, and quite often, it is necessary to specify the vertices of a polygon, even if a figure is given. For example, consider the simple polygon shown below. In the absence of additional information, we naturally assume that this simple polygon has 4 vertices and 4 sides. However, it is possible that there are more vertices and sides. Consider the two views below of figures with the same shape, with the vertices showing. The first of these has an additional vertex, and consequently an additional side (it really is possible for 2 sides to be adjacent and collinear). For this reason, whenever referring to a simple polygon, we will either clearly plot the vertices, or list them. We assume the reader understands the difference between the interior and the exterior of a simple polygon, as well as the idea of traversing the boundary of a simple polygon in a counter- clockwise orientation . -

From One Polygon to Another: a Distinctive Feature of Some Ottoman Minarets
Bernard Parzysz Research Université d’Orléans (France) From One Polygon to Another: Laboratoire André-Revuz Université Paris-Diderot A Distinctive Feature of Some 22 avenue du Général Leclerc Ottoman Minarets 92260 Fontenay-aux-Roses FRANCE Abstract. This article is a geometer’s reflection on a specificity [email protected] presented by some Turkish minarets erected during the Ottoman period which gives them a recognisable appearance. Keywords: Ottoman The intermediate zone (pabuç) between the shaft and the architecture, minarets, base of these minarets, which has both a functional and an polyhedra, Turkish triangles aesthetic function, is also an answer to the problem of connecting two prismatic solids having an unequal number of lateral sides (namely, two different multiples of 4). In the present case this connection was achieved by creating a polyhedron, the lateral sides of which are triangles placed head to tail. The multiple variables of the problem allowed the Ottoman architects to produce various solutions. 1 Introduction Each religion developed specific places for worship: synagogues, temples, churches, mosques, and so forth, and the rites and ceremonies for which they were designed conditioned their architecture. Mosques are associated with Islam, and are most certainly perceived throughout the world as its most typical monuments. They accompanied very early the history of this religion, but one of their most emblematic features, the minaret, did not appear immediately and when they did, specificities occurred depending on the period and geographic and cultural area they were built in. As Auguste Choisy writes in his Histoire de l’architecture: “Minarets have their own geography, just as steeples have theirs”. -

Areas and Shapes of Planar Irregular Polygons
Forum Geometricorum b Volume 18 (2018) 17–36. b b FORUM GEOM ISSN 1534-1178 Areas and Shapes of Planar Irregular Polygons C. E. Garza-Hume, Maricarmen C. Jorge, and Arturo Olvera Abstract. We study analytically and numerically the possible shapes and areas of planar irregular polygons with prescribed side-lengths. We give an algorithm and a computer program to construct the cyclic configuration with its circum- circle and hence the maximum possible area. We study quadrilaterals with a self-intersection and prove that not all area minimizers are cyclic. We classify quadrilaterals into four classes related to the possibility of reversing orientation by deforming continuously. We study the possible shapes of polygons with pre- scribed side-lengths and prescribed area. In this paper we carry out an analytical and numerical study of the possible shapes and areas of general planar irregular polygons with prescribed side-lengths. We explain a way to construct the shape with maximum area, which is known to be the cyclic configuration. We write a transcendental equation whose root is the radius of the circumcircle and give an algorithm to compute the root. We provide an algorithm and a corresponding computer program that actually computes the circumcircle and draws the shape with maximum area, which can then be deformed as needed. We study quadrilaterals with a self-intersection, which are the ones that achieve minimum area and we prove that area minimizers are not necessarily cyclic, as mentioned in the literature ([4]). We also study the possible shapes of polygons with prescribed side-lengths and prescribed area. -

Wythoffian Skeletal Polyhedra
Wythoffian Skeletal Polyhedra by Abigail Williams B.S. in Mathematics, Bates College M.S. in Mathematics, Northeastern University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Dedication I would like to dedicate this dissertation to my Meme. She has always been my loudest cheerleader and has supported me in all that I have done. Thank you, Meme. ii Abstract of Dissertation Wythoff's construction can be used to generate new polyhedra from the symmetry groups of the regular polyhedra. In this dissertation we examine all polyhedra that can be generated through this construction from the 48 regular polyhedra. We also examine when the construction produces uniform polyhedra and then discuss other methods for finding uniform polyhedra. iii Acknowledgements I would like to start by thanking Professor Schulte for all of the guidance he has provided me over the last few years. He has given me interesting articles to read, provided invaluable commentary on this thesis, had many helpful and insightful discussions with me about my work, and invited me to wonderful conferences. I truly cannot thank him enough for all of his help. I am also very thankful to my committee members for their time and attention. Additionally, I want to thank my family and friends who, for years, have supported me and pretended to care everytime I start talking about math. Finally, I want to thank my husband, Keith.