A Technical Overview Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Data Compression: Dictionary-Based Coding 2 / 37 Dictionary-Based Coding Dictionary-Based Coding
Dictionary-based Coding already coded not yet coded search buffer look-ahead buffer cursor (N symbols) (L symbols) We know the past but cannot control it. We control the future but... Last Lecture Last Lecture: Predictive Lossless Coding Predictive Lossless Coding Simple and effective way to exploit dependencies between neighboring symbols / samples Optimal predictor: Conditional mean (requires storage of large tables) Affine and Linear Prediction Simple structure, low-complex implementation possible Optimal prediction parameters are given by solution of Yule-Walker equations Works very well for real signals (e.g., audio, images, ...) Efficient Lossless Coding for Real-World Signals Affine/linear prediction (often: block-adaptive choice of prediction parameters) Entropy coding of prediction errors (e.g., arithmetic coding) Using marginal pmf often already yields good results Can be improved by using conditional pmfs (with simple conditions) Heiko Schwarz (Freie Universität Berlin) — Data Compression: Dictionary-based Coding 2 / 37 Dictionary-based Coding Dictionary-Based Coding Coding of Text Files Very high amount of dependencies Affine prediction does not work (requires linear dependencies) Higher-order conditional coding should work well, but is way to complex (memory) Alternative: Do not code single characters, but words or phrases Example: English Texts Oxford English Dictionary lists less than 230 000 words (including obsolete words) On average, a word contains about 6 characters Average codeword length per character would be limited by 1 -

Kulkarni Uta 2502M 11649.Pdf
IMPLEMENTATION OF A FAST INTER-PREDICTION MODE DECISION IN H.264/AVC VIDEO ENCODER by AMRUTA KIRAN KULKARNI Presented to the Faculty of the Graduate School of The University of Texas at Arlington in Partial Fulfillment of the Requirements for the Degree of MASTER OF SCIENCE IN ELECTRICAL ENGINEERING THE UNIVERSITY OF TEXAS AT ARLINGTON May 2012 ACKNOWLEDGEMENTS First and foremost, I would like to take this opportunity to offer my gratitude to my supervisor, Dr. K.R. Rao, who invested his precious time in me and has been a constant support throughout my thesis with his patience and profound knowledge. His motivation and enthusiasm helped me in all the time of research and writing of this thesis. His advising and mentoring have helped me complete my thesis. Besides my advisor, I would like to thank the rest of my thesis committee. I am also very grateful to Dr. Dongil Han for his continuous technical advice and financial support. I would like to acknowledge my research group partner, Santosh Kumar Muniyappa, for all the valuable discussions that we had together. It helped me in building confidence and motivated towards completing the thesis. Also, I thank all other lab mates and friends who helped me get through two years of graduate school. Finally, my sincere gratitude and love go to my family. They have been my role model and have always showed me right way. Last but not the least; I would like to thank my husband Amey Mahajan for his emotional and moral support. April 20, 2012 ii ABSTRACT IMPLEMENTATION OF A FAST INTER-PREDICTION MODE DECISION IN H.264/AVC VIDEO ENCODER Amruta Kulkarni, M.S The University of Texas at Arlington, 2011 Supervising Professor: K.R. -

Automatic Detection of Perceived Ringing Regions in Compressed Images
International Journal of Electronics and Communication Engineering. ISSN 0974-2166 Volume 4, Number 5 (2011), pp. 491-516 © International Research Publication House http://www.irphouse.com Automatic Detection of Perceived Ringing Regions in Compressed Images D. Minola Davids Research Scholar, Singhania University, Rajasthan, India Abstract An efficient approach toward a no-reference ringing metric intrinsically exists of two steps: first detecting regions in an image where ringing might occur, and second quantifying the ringing annoyance in these regions. This paper presents a novel approach toward the first step: the automatic detection of regions visually impaired by ringing artifacts in compressed images. It is a no- reference approach, taking into account the specific physical structure of ringing artifacts combined with properties of the human visual system (HVS). To maintain low complexity for real-time applications, the proposed approach adopts a perceptually relevant edge detector to capture regions in the image susceptible to ringing, and a simple yet efficient model of visual masking to determine ringing visibility. Index Terms: Luminance masking, per-ceptual edge, ringing artifact, texture masking. Introduction In current visual communication systems, the most essential task is to fit a large amount of visual information into the narrow bandwidth of transmission channels or into a limited storage space, while maintaining the best possible perceived quality for the viewer. A variety of compression algorithms, for example, such as JPEG[1] and MPEG/H.26xhave been widely adopted in image and video coding trying to achieve high compression efficiency at high quality. These lossy compression techniques, however, inevitably result in various coding artifacts, which by now are known and classified as blockiness, ringing, blur, etc. -

1. in the New Document Dialog Box, on the General Tab, for Type, Choose Flash Document, Then Click______
1. In the New Document dialog box, on the General tab, for type, choose Flash Document, then click____________. 1. Tab 2. Ok 3. Delete 4. Save 2. Specify the export ________ for classes in the movie. 1. Frame 2. Class 3. Loading 4. Main 3. To help manage the files in a large application, flash MX professional 2004 supports the concept of _________. 1. Files 2. Projects 3. Flash 4. Player 4. In the AppName directory, create a subdirectory named_______. 1. Source 2. Flash documents 3. Source code 4. Classes 5. In Flash, most applications are _________ and include __________ user interfaces. 1. Visual, Graphical 2. Visual, Flash 3. Graphical, Flash 4. Visual, AppName 6. Test locally by opening ________ in your web browser. 1. AppName.fla 2. AppName.html 3. AppName.swf 4. AppName 7. The AppName directory will contain everything in our project, including _________ and _____________ . 1. Source code, Final input 2. Input, Output 3. Source code, Final output 4. Source code, everything 8. In the AppName directory, create a subdirectory named_______. 1. Compiled application 2. Deploy 3. Final output 4. Source code 9. Every Flash application must include at least one ______________. 1. Flash document 2. AppName 3. Deploy 4. Source 10. In the AppName/Source directory, create a subdirectory named __________. 1. Source 2. Com 3. Some domain 4. AppName 11. In the AppName/Source/Com directory, create a sub directory named ______ 1. Some domain 2. Com 3. AppName 4. Source 12. A project is group of related _________ that can be managed via the project panel in the flash. -
Video Coding Standards
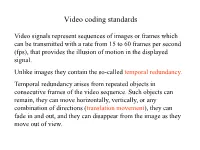
Video coding standards Video signals represent sequences of images or frames which can be transmitted with a rate from 15 to 60 frames per second (fps), that provides the illusion of motion in the displayed signal. Unlike images they contain the so-called temporal redundancy. Temporal redundancy arises from repeated objects in consecutive frames of the video sequence. Such objects can remain, they can move horizontally, vertically, or any combination of directions (translation movement), they can fade in and out, and they can disappear from the image as they move out of view. Temporal redundancy Motion compensation A motion compensation technique is used to compensate the temporal redundancy of video sequence. The main idea of the this method is to predict the displacement of group of pixels (usually block of pixels) from their position in the previous frame. Information about this displacement is represented by motion vectors which are transmitted together with the DCT coded difference between the predicted and the original images. Motion compensation Image VLC DCT Quantizer Buffer - Dequantizer Coded DCT coefficients. IDCT Motion compensated predictor Motion Motion vectors estimation Decoded VL image Buffer Dequantizer IDCT decoder Motion compensated predictor Motion vectors Motion compensation Previous frame Current frame Set of macroblocks of the previous frame used to predict the selected macroblock of the current frame Motion compensation Previous frame Current frame Macroblocks of previous frame used to predict current frame Motion compensation Each 16x16 pixel macroblock in the current frame is compared with a set of macroblocks in the previous frame to determine the one that best predicts the current macroblock. -

The Interplay of Compile-Time and Run-Time Options for Performance Prediction Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel
The Interplay of Compile-time and Run-time Options for Performance Prediction Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel To cite this version: Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel. The Interplay of Compile-time and Run-time Options for Performance Prediction. SPLC 2021 - 25th ACM Inter- national Systems and Software Product Line Conference - Volume A, Sep 2021, Leicester, United Kingdom. pp.1-12, 10.1145/3461001.3471149. hal-03286127 HAL Id: hal-03286127 https://hal.archives-ouvertes.fr/hal-03286127 Submitted on 15 Jul 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. The Interplay of Compile-time and Run-time Options for Performance Prediction Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel Univ Rennes, INSA Rennes, CNRS, Inria, IRISA Rennes, France [email protected] ABSTRACT Both compile-time and run-time options can be configured to reach Many software projects are configurable through compile-time op- specific functional and performance goals. tions (e.g., using ./configure) and also through run-time options (e.g., Existing studies consider either compile-time or run-time op- command-line parameters, fed to the software at execution time). -

Annual Report 2016
ANNUAL REPORT 2016 PUNJABI UNIVERSITY, PATIALA © Punjabi University, Patiala (Established under Punjab Act No. 35 of 1961) Editor Dr. Shivani Thakar Asst. Professor (English) Department of Distance Education, Punjabi University, Patiala Laser Type Setting : Kakkar Computer, N.K. Road, Patiala Published by Dr. Manjit Singh Nijjar, Registrar, Punjabi University, Patiala and Printed at Kakkar Computer, Patiala :{Bhtof;Nh X[Bh nk;k wjbk ñ Ò uT[gd/ Ò ftfdnk thukoh sK goT[gekoh Ò iK gzu ok;h sK shoE tk;h Ò ñ Ò x[zxo{ tki? i/ wB[ bkr? Ò sT[ iw[ ejk eo/ w' f;T[ nkr? Ò ñ Ò ojkT[.. nk; fBok;h sT[ ;zfBnk;h Ò iK is[ i'rh sK ekfJnk G'rh Ò ò Ò dfJnk fdrzpo[ d/j phukoh Ò nkfg wo? ntok Bj wkoh Ò ó Ò J/e[ s{ j'fo t/; pj[s/o/.. BkBe[ ikD? u'i B s/o/ Ò ô Ò òõ Ò (;qh r[o{ rqzE ;kfjp, gzBk óôù) English Translation of University Dhuni True learning induces in the mind service of mankind. One subduing the five passions has truly taken abode at holy bathing-spots (1) The mind attuned to the infinite is the true singing of ankle-bells in ritual dances. With this how dare Yama intimidate me in the hereafter ? (Pause 1) One renouncing desire is the true Sanayasi. From continence comes true joy of living in the body (2) One contemplating to subdue the flesh is the truly Compassionate Jain ascetic. Such a one subduing the self, forbears harming others. (3) Thou Lord, art one and Sole. -

On Audio-Visual File Formats
On Audio-Visual File Formats Summary • digital audio and digital video • container, codec, raw data • different formats for different purposes Reto Kromer • AV Preservation by reto.ch • audio-visual data transformations Film Preservation and Restoration Hyderabad, India 8–15 December 2019 1 2 Digital Audio • sampling Digital Audio • quantisation 3 4 Sampling • 44.1 kHz • 48 kHz • 96 kHz • 192 kHz digitisation = sampling + quantisation 5 6 Quantisation • 16 bit (216 = 65 536) • 24 bit (224 = 16 777 216) • 32 bit (232 = 4 294 967 296) Digital Video 7 8 Digital Video Resolution • resolution • SD 480i / SD 576i • bit depth • HD 720p / HD 1080i • linear, power, logarithmic • 2K / HD 1080p • colour model • 4K / UHD-1 • chroma subsampling • 8K / UHD-2 • illuminant 9 10 Bit Depth Linear, Power, Logarithmic • 8 bit (28 = 256) «medium grey» • 10 bit (210 = 1 024) • linear: 18% • 12 bit (212 = 4 096) • power: 50% • 16 bit (216 = 65 536) • logarithmic: 50% • 24 bit (224 = 16 777 216) 11 12 Colour Model • XYZ, L*a*b* • RGB / R′G′B′ / CMY / C′M′Y′ • Y′IQ / Y′UV / Y′DBDR • Y′CBCR / Y′COCG • Y′PBPR 13 14 15 16 17 18 RGB24 00000000 11111111 00000000 00000000 00000000 00000000 11111111 00000000 00000000 00000000 00000000 11111111 00000000 11111111 11111111 11111111 11111111 00000000 11111111 11111111 11111111 11111111 00000000 11111111 19 20 Compression Uncompressed • uncompressed + data simpler to process • lossless compression + software runs faster • lossy compression – bigger files • chroma subsampling – slower writing, transmission and reading • born -

Screen Capture Tools to Record Online Tutorials This Document Is Made to Explain How to Use Ffmpeg and Quicktime to Record Mini Tutorials on Your Own Computer
Screen capture tools to record online tutorials This document is made to explain how to use ffmpeg and QuickTime to record mini tutorials on your own computer. FFmpeg is a cross-platform tool available for Windows, Linux and Mac. Installation and use process depends on your operating system. This info is taken from (Bellard 2016). Quicktime Player is natively installed on most of Mac computers. This tutorial focuses on Linux and Mac. Table of content 1. Introduction.......................................................................................................................................1 2. Linux.................................................................................................................................................1 2.1. FFmpeg......................................................................................................................................1 2.1.1. installation for Linux..........................................................................................................1 2.1.1.1. Add necessary components........................................................................................1 2.1.2. Screen recording with FFmpeg..........................................................................................2 2.1.2.1. List devices to know which one to record..................................................................2 2.1.2.2. Record screen and audio from your computer...........................................................3 2.2. Kazam........................................................................................................................................4 -
Amphion Video Codecs in an AI World
Video Codecs In An AI World Dr Doug Ridge Amphion Semiconductor The Proliferance of Video in Networks • Video produces huge volumes of data • According to Cisco “By 2021 video will make up 82% of network traffic” • Equals 3.3 zetabytes of data annually • 3.3 x 1021 bytes • 3.3 billion terabytes AI Engines Overview • Example AI network types include Artificial Neural Networks, Spiking Neural Networks and Self-Organizing Feature Maps • Learning and processing are automated • Processing • AI engines designed for processing huge amounts of data quickly • High degree of parallelism • Much greater performance and significantly lower power than CPU/GPU solutions • Learning and Inference • AI ‘learns’ from masses of data presented • Data presented as Input-Desired Output or as unmarked input for self-organization • AI network can start processing once initial training takes place Typical Applications of AI • Reduce data to be sorted manually • Example application in analysis of mammograms • 99% reduction in images send for analysis by specialist • Reduction in workload resulted in huge reduction in wrong diagnoses • Aid in decision making • Example application in traffic monitoring • Identify areas of interest in imagery to focus attention • No definitive decision made by AI engine • Perform decision making independently • Example application in security video surveillance • Alerts and alarms triggered by AI analysis of behaviours in imagery • Reduction in false alarms and more attention paid to alerts by security staff Typical Video Surveillance -

A Practical Approach to Spatiotemporal Data Compression
A Practical Approach to Spatiotemporal Data Compres- sion Niall H. Robinson1, Rachel Prudden1 & Alberto Arribas1 1Informatics Lab, Met Office, Exeter, UK. Datasets representing the world around us are becoming ever more unwieldy as data vol- umes grow. This is largely due to increased measurement and modelling resolution, but the problem is often exacerbated when data are stored at spuriously high precisions. In an effort to facilitate analysis of these datasets, computationally intensive calculations are increasingly being performed on specialised remote servers before the reduced data are transferred to the consumer. Due to bandwidth limitations, this often means data are displayed as simple 2D data visualisations, such as scatter plots or images. We present here a novel way to efficiently encode and transmit 4D data fields on-demand so that they can be locally visualised and interrogated. This nascent “4D video” format allows us to more flexibly move the bound- ary between data server and consumer client. However, it has applications beyond purely scientific visualisation, in the transmission of data to virtual and augmented reality. arXiv:1604.03688v2 [cs.MM] 27 Apr 2016 With the rise of high resolution environmental measurements and simulation, extremely large scientific datasets are becoming increasingly ubiquitous. The scientific community is in the pro- cess of learning how to efficiently make use of these unwieldy datasets. Increasingly, people are interacting with this data via relatively thin clients, with data analysis and storage being managed by a remote server. The web browser is emerging as a useful interface which allows intensive 1 operations to be performed on a remote bespoke analysis server, but with the resultant information visualised and interrogated locally on the client1, 2. -

(A/V Codecs) REDCODE RAW (.R3D) ARRIRAW
What is a Codec? Codec is a portmanteau of either "Compressor-Decompressor" or "Coder-Decoder," which describes a device or program capable of performing transformations on a data stream or signal. Codecs encode a stream or signal for transmission, storage or encryption and decode it for viewing or editing. Codecs are often used in videoconferencing and streaming media solutions. A video codec converts analog video signals from a video camera into digital signals for transmission. It then converts the digital signals back to analog for display. An audio codec converts analog audio signals from a microphone into digital signals for transmission. It then converts the digital signals back to analog for playing. The raw encoded form of audio and video data is often called essence, to distinguish it from the metadata information that together make up the information content of the stream and any "wrapper" data that is then added to aid access to or improve the robustness of the stream. Most codecs are lossy, in order to get a reasonably small file size. There are lossless codecs as well, but for most purposes the almost imperceptible increase in quality is not worth the considerable increase in data size. The main exception is if the data will undergo more processing in the future, in which case the repeated lossy encoding would damage the eventual quality too much. Many multimedia data streams need to contain both audio and video data, and often some form of metadata that permits synchronization of the audio and video. Each of these three streams may be handled by different programs, processes, or hardware; but for the multimedia data stream to be useful in stored or transmitted form, they must be encapsulated together in a container format.