Maxwell Equations and Hyperbolic Metamaterial
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
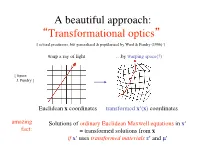
A Beautiful Approach: Transformational Optics
A beautiful approach: “Transformational optics” [ several precursors, but generalized & popularized by Ward & Pendry (1996) ] warp a ray of light …by warping space(?) [ figure: J. Pendry ] Euclidean x coordinates transformed x'(x) coordinates amazing Solutions of ordinary Euclidean Maxwell equations in x' fact: = transformed solutions from x if x' uses transformed materials ε' and μ' Maxwell’s Equations constants: ε0, μ0 = vacuum permittivity/permeability = 1 –1/2 c = vacuum speed of light = (ε0 μ0 ) = 1 ! " B = 0 Gauss: constitutive ! " D = # relations: James Clerk Maxwell #D E = D – P 1864 Ampere: ! " H = + J #t H = B – M $B Faraday: ! " E = # $t electromagnetic fields: sources: J = current density E = electric field ρ = charge density D = displacement field H = magnetic field / induction material response to fields: B = magnetic field / flux density P = polarization density M = magnetization density Constitutive relations for macroscopic linear materials P = χe E ⇒ D = (1+χe) E = ε E M = χm H B = (1+χm) H = μ H where ε = 1+χe = electric permittivity or dielectric constant µ = 1+χm = magnetic permeability εµ = (refractive index)2 Transformation-mimicking materials [ Ward & Pendry (1996) ] E(x), H(x) J–TE(x(x')), J–TH(x(x')) [ figure: J. Pendry ] Euclidean x coordinates transformed x'(x) coordinates J"JT JµJT ε(x), μ(x) " ! = , µ ! = (linear materials) det J det J J = Jacobian (Jij = ∂xi’/∂xj) (isotropic, nonmagnetic [μ=1], homogeneous materials ⇒ anisotropic, magnetic, inhomogeneous materials) an elementary derivation [ Kottke (2008) ] consider× -

Maxwell Discovers That Light Is Electromagnetic Waves in 1862
MAXWELL DISCOVERS LIGHT IS ELECTROMAGNETIC WAVES James Clerk Maxwell was a Scottish scientist. He worked in the mid-nineteenth century in Scotland and England. At that time, electricity and magnetism had been extensively studied, and it was known since 1831 that electric current produces magnetism. Maxwell added the idea that changing magnetism could produce electricity. The term that Maxwell added to the known equations (called Ampere's law) for magnetism allowed Maxwell to see that there were wave-like solutions, that is, solutions that look like a sine wave (as a function of time). The numbers in Maxwell's equations all came from laboratory experiments on electric- ity and magnetism. There was nothing in those equations about light, and radio waves were completely unknown at the time, so the existence of electromagnetic waves was also completely unknown. But mathematics showed that Maxwell's equations had wave-like solutions. What did that mean? Maxwell proceeded to calculate the speed of those waves, which of course depended on the numbers that came from lab experiments with electricity and magnetism (not with light!). He got the answer 310,740,000 meters per second. Maxwell must have had an \aha moment" when he recognized that number. He did recognize that number: it was the speed of light! He was lecturing at King's College, London, in 1862, and there he presented his result that the speed of propagation of an electromagnetic field is approximately that of the speed of light. He considered this to be more than just a coincidence, and commented: \We can scarcely avoid the conclusion that light consists in the transverse undulations of the same medium which is the cause of electric and magnetic phenomena." 1 2 MAXWELL DISCOVERS LIGHT IS ELECTROMAGNETIC WAVES He published his work in his 1864 paper, A dynamical theory of the electromagnetic field. -

J Ames Clerk Maxwell and His Equations
GENERAL I ARTICLE James Clerk Maxwell and his Equations B N Dwivedi This article presents a brief account of life and work of James Clerk Maxwell and his equations. James Clerk Maxwell James Clerk Maxwell was a physicists' physicist, the prime author of the modern theory of colour vision, the principal B N Dwivedi does creator of statistical thermodynamics, and above all the author research in solar physics of the classical electromagnetic theory, with its identification of and teaches physics in light and electromagnetic waves. Maxwell's electromagnetic Banaras Hindu University. theory is acknowledged as one of the outstanding achievements He has over twenty two years of teaching of nineteenth century physics. If you wake up a physicist in the experience and broad middle of the night and say 'Maxwell', I am sure he will say experience in solar 'electromagnetic theory'. Einstein described the change brought research with involvement about by Maxwell in the conception of physical reality as "the in almost all the major solar space experiments, most profound and the most fruitful that physics has experi including Sky lab, Yohkoh, enced since the time of Newton". Maxwell's description of SOHO, and TRACE. The reality is represented in his double system of partial differential Max-Planck-Institut fur equations in which the electric and magnetic fields appear as Aeronomie recently awarded him the 'Gold dependent variables. Since Maxwell's time physical reality has Pin' in recognition of his been thought of as represented by continuous fields governed by outstanding contribution partial differential equations. The advent of quantum mechan to the SOHO/Sumer ics, rather than the theory of relativity, has produced a situation experiment. -

1.1. Galilean Relativity
1.1. Galilean Relativity Galileo Galilei 1564 - 1642 Dialogue Concerning the Two Chief World Systems The fundamental laws of physics are the same in all frames of reference moving with constant velocity with respect to one another. Metaphor of Galileo’s Ship Ship traveling at constant speed on a smooth sea. Any observer doing experiments (playing billiard) under deck would not be able to tell if ship was moving or stationary. Today we can make the same Even better: Earth is orbiting observation on a plane. around sun at v 30 km/s ! ≈ 1.2. Frames of Reference Special Relativity is concerned with events in space and time Events are labeled by a time and a position relative to a particular frame of reference (e.g. the sun, the earth, the cabin under deck of Galileo’s ship) E =(t, x, y, z) Pick spatial coordinate frame (origin, coordinate axes, unit length). In the following, we will always use cartesian coordinate systems Introduce clocks to measure time of an event. Imagine a clock at each position in space, all clocks synchronized, define origin of time Rest frame of an object: frame of reference in which the object is not moving Inertial frame of reference: frame of reference in which an isolated object experiencing no force moves on a straight line at constant velocity 1.3. Galilean Transformation Two reference frames ( S and S ) moving with velocity v to each other. If an event has coordinates ( t, x, y, z ) in S , what are its coordinates ( t ,x ,y ,z ) in S ? in the following, we will always assume the “standard configuration”: Axes of S and S parallel v parallel to x-direction Origins coincide at t = t =0 x vt x t = t Time is absolute Galilean x = x vt Transf. -

International Year of Light Blog James Clerk Maxwell, the Man Who
12/7/2015 James Clerk Maxwell, the man who changed the world forever II | International Year of Light Blog International Year of Light Blog James Clerk Maxwell, the man who changed the world forever II JUNE 15, 2015JUNE 11, 2015 LIGHT2015 LEAVE A COMMENT A Dynamical Theory of the Electromagnetic Field Maxwell left us contributions to colour theory, optics, Saturn’s rings, statics, dynamics, solids, instruments and statistical physics. However, his most important contributions were to electromagnetism. In 1856, he published On Faraday’s lines of force; in 1861, On physical lines of force. In these two articles he provided a mathematical explanation for Faraday’s ideas on electrical and magnetic phenomena depending on the distribution of lines of force in space, definitively abandoning the classical doctrine of electrical and magnetic forces as actions at a distance. His mathematical theory included the aether, that «most subtle spirit», as Newton described it. He studied electromagnetic interactions quite naturally in the context of an omnipresent aether. Maxwell stood firm that the aether was not a hypothetical entity, but a real one and, in fact, for physicists in the nineteenth century, aether was as real as the rocks supporting the Cavendish Laboratory. http://light2015blog.org/2015/06/15/james-clerk-maxwell-the-man-who-changed-the-world-forever-ii/ 1/6 12/7/2015 James Clerk Maxwell, the man who changed the world forever II | International Year of Light Blog (https://light2015blogdotorg.files.wordpress.com/2015/06/figure_3.jpg) http://light2015blog.org/2015/06/15/james-clerk-maxwell-the-man-who-changed-the-world-forever-ii/ -

Lessons from Faraday, Maxwell, Kepler and Newton
Science Education International Vol. 26, Issue 1, 2015, 3-23 Personal Beliefs as Key Drivers in Identifying and Solving Seminal Problems: Lessons from Faraday, Maxwell, Kepler and Newton I. S. CALEON*, MA. G. LOPEZ WUI†, MA. H. P. REGAYA‡ ABSTRACT: The movement towards the use of the history of science and problem-based approaches in teaching serves as the impetus for this paper. This treatise aims to present and examine episodes in the lives of prominent scientists that can be used as resources by teachers in relation to enhancing students’ interest in learning, fostering skills about problem solving and developing scientific habits of mind. The paper aims to describe the nature and basis of the personal beliefs, both religious and philosophical, of four prominent scientists—Faraday, Maxwell, Kepler and Newton. P atterns of how these scientists set the stage for a fruitful research endeavor within the context of an ill-structured problem situation a re e x a m i n e d and how their personal beliefs directed their problem-solving trajectories was elaborated. T h e analysis of these key seminal works provide evidence that rationality and religion need not necessarily lie on opposite fences: both can serve as useful resources to facilitate the fruition of notable scientific discoveries. KEY WORDS: history of science; science and religion; personal beliefs; problem solving; Faraday; Maxwell; Kepler; Newton INTRODUCTION Currently, there has been a movement towards the utilization of historical perspectives in science teaching (Irwin, 2000; Seker, 2012; Solbes & Traver, 2003). At the same time, contemporary science education reform efforts have suggested that teachers utilize problem-based instructional approaches (Faria, Freire, Galvão, Reis & Baptista, 2012; Sadeh & Zion, 2009; Wilson, Taylor, Kowalski, & Carlson, 2010). -

James Clerk Maxwell 1831-1879
James Clerk Maxwell 1831-1879 lems too. In particular, it is not clear Earlier this year saw the centenary 1 3 June 1 831, but soon went to live whether many of the nice results of of the birth of Albert Einstein. It is at Glenlair. At the age of ten, he the MIT bag for hadronic properties highly apt that 1979, which has returned to Edinburgh to begin his will be lost. A great deal of challeng been marked by further consolida formal schooling, where his unfash ing work lies ahead for both experi tion of the unified theory of weak ionable clothes and rustic manner mentalists and theorists. At question and electromagnetic interactions were mocked by his schoolfellows. is the whole understanding of and its recognition in the award of The genius who was to shape much atomic nuclei at the microscopic the Nobel Prize to Glashow, Salam of physics apparently earned the level, but that is the sort of question and Weinberg, is also the centenary name 'Dafty'. that Weisskopf and de Shalit had in of the death of the great Scottish By fourteen, he had developed a mind when they instituted this series physicist who first formulated a method for constructing geometrical of Conferences. unified theory of electric and mag figures which was read as a paper to netic fields. We are grateful to the Royal Society of Edinburgh. His Abdus Salam for drawing our at evident interest in physics led his tention to the Maxwell anniversary. uncle to introduce him to William Nicol, of prism fame. -

James Clerk Maxwell and the Physics of Sound
James Clerk Maxwell and the Physics of Sound Philip L. Marston e 19th century innovator of electromagnetic theory and gas kinetic theory was more involved in acoustics than is often assumed. Postal: Physics and Astronomy Department Washington State University Introduction Pullman, Washington 99164-2814 e International Year of Light in 2015 served in part to commemorate James USA Clerk Maxwell’s mathematical formulation of the electromagnetic wave theory Email: of light published in 1865 (Marston, 2016). Maxwell, however, is also remem- [email protected] bered for a wide range of other contributions to physics and engineering includ- ing, though not limited to, areas such as the kinetic theory of gases, the theory of color perception, thermodynamic relations, Maxwell’s “demon” (associated with the mathematical theory of information), photoelasticity, elastic stress functions and reciprocity theorems, and electrical standards and measurement methods (Flood et al., 2014). Consequently, any involvement of Maxwell in acoustics may appear to be unworthy of consideration. is survey is oered to help overturn that perspective. For the present author, the idea of examining Maxwell’s involvement in acous- tics arose when reading a review concerned with the propagation of sound waves in gases at low pressures (Greenspan, 1965). Writing at a time when he served as an Acoustical Society of America (ASA) ocer, Greenspan was well aware of the importance of the fully developed kinetic theory of gases for understanding sound propagation in low-pressure gases; the average time between the collision of gas molecules introduces a timescale relevant to high-frequency propagation. However, Greenspan went out of his way to mention an addendum at the end of an obscure paper communicated by Maxwell (Preston, 1877). -

Michael Faraday: a Virtuous Life Dedicated to Science Citation: F
Firenze University Press www.fupress.com/substantia Historical Article Michael Faraday: a virtuous life dedicated to science Citation: F. Bagnoli and R. Livi (2018) Michael Faraday: a virtuous life dedi- cated to science. Substantia 2(1): 121-134. doi: 10.13128/substantia-45 Franco Bagnoli and Roberto Livi Copyright: © 2018 F. Bagnoli and Department of Physics and Astronomy and CSDC, University of Florence R. Livi. This is an open access, peer- E-mail: [email protected] reviewed article published by Firenze University Press (http://www.fupress. com/substantia) and distribuited under the terms of the Creative Commons Abstract. We review the main aspects of the life of Michael Faraday and some of his Attribution License, which permits main scientific discoveries. Although these aspects are well known and covered in unrestricted use, distribution, and many extensive treatises, we try to illustrate in a concise way the two main “wonders” reproduction in any medium, provided of Faraday’s life: that the son of a poor blacksmith in the Victorian age was able to the original author and source are credited. become the director the Royal Institution and member of the Royal Society, still keep- ing a honest and “virtuous” moral conduct, and that Faraday’s approach to many top- Data Availability Statement: All rel- ics, but mainly to electrochemistry and electrodynamics, has paved the way to the evant data are within the paper and its modern (atomistic and field-based) view of physics, only relying on experiments and Supporting Information files. intuition. We included many excerpts from Faraday’s letters and laboratory notes in order to let the readers have a direct contact with this scientist. -

James Clerk Maxwell: Maker of Waves
James Clerk Maxwell: Maker of Waves by D O FORFAR, MA, FFA, FSS, FIMA, CMath. Article based on a talk given at the conference 'SCOTLAND'S MATHEMATICAL HERITAGE: NAPIER TO CLERK MAXWELL' held at Royal Society of Edinburgh on 20/21 July 1995 INTRODUCTION It is the hallmark of great physicists that they change our perception of the workings of Nature. These changes in perception are often surprising, even to their originators, go against the perceived wisdom of the time and often encounter considerable resistance to their acceptance. Once however their explanatory power, predictive ability and experimental demonstration become manifest the case for their acceptance becomes overwhelming. The new theories become in their turn the perceived wisdom and future generations wonder why anyone could have doubted their truth and cannot conceive that, at the time the new theories were originated, there were rival theories vying for acceptance. James Clerk Maxwell and Michael Faraday were great physicists. The truth of the Faraday/Maxwell theory of electromagnetic phenomena, namely that these are described by electric and magnetic fields propagated in space at finite velocity and governed by certain mathematical equations, changed our perception of the world. The theory is now universally accepted and it is forgotten that there were powerful advocates at the time of an alternative theory which I shall call the 'German Theory' of Weber, Neumann, Riemann and Lorenz which was founded on the theory of action at a distance, a physical hypothesis which was entirely alien to the Faraday/Maxwell theory. You will note that I have called the theory, the Faraday/Maxwell theory, rather than just the Maxwell theory. -

History of Physics Group Newsletter
Institute of Physics History of Physics Group Newsletter Spring 2000 No. 13 Contents Editorial 3 Committee and contacts 4 Chairman’s report 5 Honorary Secretary’s report 7 Blue Plaques for Physicists – White Plaque for a non-physicist! 8 Past Meetings – Professor Sir Joseph Rotblat – my early years as a physicist in Poland 9 Physics and Religion 24 1. Some Questions Concerning the Relation of Physics and Religion Dr. Hugh Montgomery 26 2. The Calendar and Religion Dr. Edward Graham Richards 32 3. Newton and the Interactions between Science and Religion Dr. Robert Iliffe 38 4. The Religious Outlook of James Clerk Maxwell Prof. Kingsley Elder 41 5. The Significance of Philoponos as a Forerunner of Clerk Maxwell Prof. Thomas F. Torrance 48 6. Theology and Modern Physics Dr. Peter Rowlands 57 Volta and the Invention of the Electrochemical Battery: review by Neil Brown 63 Future Meetings - Meetings arranged by this Group 67 Other meetings, at home and abroad 69 Editorial Welcome to the 2000 edition of the History of Physics Group Newsletter. I was going to say “the first issue of the new millennium”, but I expect that would open up a large can of worms. If you did celebrate on December 31st last year, then I hope it went well. If you’re saving your celebrations for this coming December, then you’ve got it all to look forward to, and at least the Millennium Wheel might be properly open to the public by then ... The “Blue Plaques for Physicists” project is slowly developing. We have had a good response from people willing to help by taking a photo or writing a couple of paragraphs about their local physicist, but there are still some gaps, so if you would like to take part, do get in touch (my contact details are overleaf). -
The Legacy of James Clerk Maxwell and Herrmann Von Helmholtz Peter Skiff Bard College
Bard College Bard Digital Commons Faculty Books & Manuscripts Bard Faculty Publications 2016 The hP ysicist - Philosophers: The Legacy of James Clerk Maxwell and Herrmann von Helmholtz Peter Skiff Bard College Follow this and additional works at: http://digitalcommons.bard.edu/facbooks Part of the History of Science, Technology, and Medicine Commons, Philosophy of Science Commons, and the Physics Commons Recommended Citation Skiff, Peter, "The hP ysicist - Philosophers: The Legacy of James Clerk Maxwell and Herrmann von Helmholtz" (2016). Faculty Books & Manuscripts. 1. http://digitalcommons.bard.edu/facbooks/1 This Book is brought to you for free and open access by the Bard Faculty Publications at Bard Digital Commons. It has been accepted for inclusion in Faculty Books & Manuscripts by an authorized administrator of Bard Digital Commons. For more information, please contact [email protected]. THE PHYSICIST - PHILOSOPHERS The Legacy of James Clerk Maxwell and Herrmann von Helmholtz Peter Skiff Bard College, 2016 ACKNOWLEDGMENTS This work was begun 25 years into a 50 year career at Bard College. This position gave me access to an extraordinary range of exceptional faculty, distinguished visiting scholars, and brilliant student researchers, all of whom inspired and informed im investigating academic fields I pursued: mathematical physics and the history and philosophy of science. In addition the editors of the American Library Association’s Choice magazine provided literally hundreds of books for review for college libraries. It is from this trove of ideas and information I have been assembling this book. I am particularly grateful to particular advice and information from Hannah Arendt, Heinrich Bluecher, Irma Brandeis, and A.