1.1. Galilean Relativity
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Cen, Julia.Pdf
City Research Online City, University of London Institutional Repository Citation: Cen, J. (2019). Nonlinear classical and quantum integrable systems with PT -symmetries. (Unpublished Doctoral thesis, City, University of London) This is the accepted version of the paper. This version of the publication may differ from the final published version. Permanent repository link: https://openaccess.city.ac.uk/id/eprint/23891/ Link to published version: Copyright: City Research Online aims to make research outputs of City, University of London available to a wider audience. Copyright and Moral Rights remain with the author(s) and/or copyright holders. URLs from City Research Online may be freely distributed and linked to. Reuse: Copies of full items can be used for personal research or study, educational, or not-for-profit purposes without prior permission or charge. Provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way. City Research Online: http://openaccess.city.ac.uk/ [email protected] Nonlinear Classical and Quantum Integrable Systems with PT -symmetries Julia Cen A Thesis Submitted for the Degree of Doctor of Philosophy School of Mathematics, Computer Science and Engineering Department of Mathematics Supervisor : Professor Andreas Fring September 2019 Thesis Commission Internal examiner Dr Olalla Castro-Alvaredo Department of Mathematics, City, University of London, UK External examiner Professor Andrew Hone School of Mathematics, Statistics and Actuarial Science University of Kent, UK Chair Professor Joseph Chuang Department of Mathematics, City, University of London, UK i To my parents. -

Weak Galilean Invariance As a Selection Principle for Coarse
Weak Galilean invariance as a selection principle for coarse-grained diffusive models Andrea Cairolia,b, Rainer Klagesb, and Adrian Bauleb,1 aDepartment of Bioengineering, Imperial College London, London SW7 2AZ, United Kingdom; and bSchool of Mathematical Sciences, Queen Mary University of London, London E1 4NS, United Kingdom Edited by David A. Weitz, Harvard University, Cambridge, MA, and approved April 16, 2018 (received for review October 2, 2017) How does the mathematical description of a system change in dif- in the long-time limit, hX 2i ∼ t β with β = 1, for anomalous dif- ferent reference frames? Galilei first addressed this fundamental fusion it scales nonlinearly with β 6=1. Anomalous dynamics has question by formulating the famous principle of Galilean invari- been observed experimentally for a wide range of physical pro- ance. It prescribes that the equations of motion of closed systems cesses like particle transport in plasmas, molecular diffusion in remain the same in different inertial frames related by Galilean nanopores, and charge transport in amorphous semiconductors transformations, thus imposing strong constraints on the dynam- (5–7) that was first theoretically described in refs. 8 and 9 based ical rules. However, real world systems are often described by on the continuous-time random walk (CTRW) (10). Likewise, coarse-grained models integrating complex internal and exter- anomalous diffusion was later found for biological motion (11– nal interactions indistinguishably as friction and stochastic forces. 13) and even human movement (14). Recently, it was established Since Galilean invariance is then violated, there is seemingly no as a ubiquitous characteristic of cellular processes on a molec- alternative principle to assess a priori the physical consistency of a ular level (15). -

General Relativity Requires Absolute Space and Time 1 Space
CORE Metadata, citation and similar papers at core.ac.uk Provided by CERN Document Server General Relativity Requires Amp`ere’s theory of magnetism [10]. Maxwell uni- Absolute Space and Time fied Faraday’s theory with Huyghens’ wave the- ory of light, where in Maxwell’s theory light is Rainer W. K¨uhne considered as an oscillating electromagnetic wave Lechstr. 63, 38120 Braunschweig, Germany which propagates through the luminiferous aether of Huyghens. We all know that the classical kinematics was re- placed by Einstein’s Special Relativity [11]. Less We examine two far-reaching and somewhat known is that Special Relativity is not able to an- heretic consequences of General Relativity. swer several problems that were explained by clas- (i) It requires a cosmology which includes sical mechanics. a preferred rest frame, absolute space and According to the relativity principle of Special time. (ii) A rotating universe and time travel Relativity, all inertial frames are equivalent, there are strict solutions of General Relativity. is no preferred frame. Absolute motion is not re- quired, only the relative motion between the iner- tial frames is needed. The postulated absence of an absolute frame prohibits the existence of an aether [11]. 1 Space and Time Before Gen- According to Special Relativity, each inertial eral Relativity frame has its own relative time. One can infer via the Lorentz transformations [12] on the time of the According to Aristotle, the Earth was resting in the other inertial frames. Absolute space and time do centre of the universe. He considered the terrestrial not exist. Furthermore, space is homogeneous and frame as a preferred frame and all motion relative isotropic, there does not exist any rotational axis of to the Earth as absolute motion. -

The Physics Surrounding the Michelson-Morley Experiment and a New Æther Theory
The physics surrounding the Michelson-Morley experiment and a new æther theory Israel P´erez Department of Applied Physics, CINVESTAV, M´erida, Yucat´an,M´exico Abstract From the customary view the Michelson-Morley experiment is used to expose the failure of the aether theory. The key point in this experiment is the fringe shift of the interference pattern. Regularly, the fringe shift calculations are only presented from the perspective of the inertial frame where the one-way speed of light is anisotropic which gives a partial vision of the problem. In a spirit of revision of these facts we have meticulously analyzed the physics behind them. As a result, an angular effect which is based on Huyghens principle and plays a fundamental role in the reflection of light waves at moving mirrors is incorporated. Moreover, under the assumption of a null result in the experiment, on the one hand, the fringe shift conditions demand actual relativistic effects; on the other, it is confirmed that Maxwell's electrodynamics and Galilean relativity are incompatible formulations. From these two points at least three inertial theories follow: (1) the special theory of relativity (SR), (2) a new aether theory (NET) based on the Tangherlini transformations and (3) emission theories based on Ritz' modification of electrodynamics. A brief review of their physical content is presented and the problem of the aether detection as well as the propagation of light, within the context of SR and the NET, are discussed. Despite the overwhelming amount of evidences that apparently favors SR we claim that there are no strong reasons to refuse the aether which conceived as a continuous material medium, still stands up as a physical reality and could be physically associated with dark matter, the cosmic background radiation and the vacuum condensates of particle physics. -

ON the GALILEAN COVARIANCE of CLASSICAL MECHANICS Abstract
Report INP No 1556/PH ON THE GALILEAN COVARIANCE OF CLASSICAL MECHANICS Andrzej Horzela, Edward Kapuścik and Jarosław Kempczyński Department of Theoretical Physics, H. Niewodniczański Institute of Nuclear Physics, ul. Radzikowskiego 152, 31 342 Krakow. Poland and Laboratorj- of Theoretical Physics, Joint Institute for Nuclear Research, 101 000 Moscow, USSR, Head Post Office. P.O. Box 79 Abstract: A Galilean covariant approach to classical mechanics of a single interact¬ ing particle is described. In this scheme constitutive relations defining forces are rejected and acting forces are determined by some fundamental differential equa¬ tions. It is shown that the total energy of the interacting particle transforms under Galilean transformations differently from the kinetic energy. The statement is il¬ lustrated on the exactly solvable examples of the harmonic oscillator and the case of constant forces and also, in the suitable version of the perturbation theory, for the anharmonic oscillator. Kraków, August 1991 I. Introduction According to the principle of relativity the laws of physics do' not depend on the choice of the reference frame in which these laws are formulated. The change of the reference frame induces only a change in the language used for the formulation of the laws. In particular, changing the reference frame we change the space-time coordinates of events and functions describing physical quantities but all these changes have to follow strictly defined ways. When that is achieved we talk about a covariant formulation of a given theory and only in such formulation we may satisfy the requirements of the principle of relativity. The non-covariant formulations of physical theories are deprived from objectivity and it is difficult to judge about their real physical meaning. -

Special Relativity
Special Relativity April 19, 2014 1 Galilean transformations 1.1 The invariance of Newton’s second law Newtonian second law, F = ma i is a 3-vector equation and is therefore valid if we make any rotation of our frame of reference. Thus, if O j is a rotation matrix and we rotate the force and the acceleration vectors, ~i i j F = O jO i i j a~ = O ja then we have F~ = ma~ and Newton’s second law is invariant under rotations. There are other invariances. Any change of the coordinates x ! x~ that leaves the acceleration unchanged is also an invariance of Newton’s law. Equating and integrating twice, a~ = a d2x~ d2x = dt2 dt2 gives x~ = x + x0 − v0t The addition of a constant, x0, is called a translation and the change of velocity of the frame of reference is called a boost. Finally, integrating the equivalence dt~= dt shows that we may reset the zero of time (a time translation), t~= t + t0 The complete set of transformations is 0 P xi = j Oijxj Rotations x0 = x + a T ranslations 0 t = t + t0 Origin of time x0 = x + vt Boosts (change of velocity) There are three independent parameters describing rotations (for example, specify a direction in space by giving two angles (θ; ') then specify a third angle, , of rotation around that direction). Translations can be in the x; y or z directions, giving three more parameters. Three components for the velocity vector and one more to specify the origin of time gives a total of 10 parameters. -

Axiomatic Newtonian Mechanics
February 9, 2017 Cornell University, Department of Physics PHYS 4444, Particle physics, HW # 1, due: 2/2/2017, 11:40 AM Question 1: Axiomatic Newtonian mechanics In this question you are asked to develop Newtonian mechanics from simple axioms. We first define the system, and assume that we have point like particles that \live" in 3d space and 1d time. The very first axiom is the principle of minimal action that stated that the system follow the trajectory that minimize S and that Z S = L(x; x;_ t)dt (1) Note that we assume here that L is only a function of x and v and not of higher derivative. This assumption is not justified from first principle, but at this stage we just assume it. We now like to find L. We like L to be the most general one that is invariant under some symmetries. These symmetries would be the axioms. For Newtonian mechanics the axiom is that the that system is invariant under: a) Time translation. b) Space translation. c) Rotation. d) Galilean transformations (I.e. shifting your reference frame by a constant velocity in non-relativistic mechanics.). Note that when we say \the system is invariant" we mean that the EOMs are unchanged under the transformation. This is the case if the new Lagrangian, L0 is the same as the old one, L up to a function that is a total time derivative, L0 = L + df(x; t)=dt. 1. Formally define these four transformations. I will start you off: time translation is: the equations of motion are invariant under t ! t + C for any C, which is equivalent to the statement L(x; v; t + C) = L(x; v; t) + df=dt for some f. -
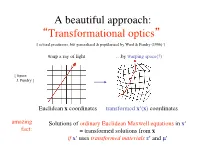
A Beautiful Approach: Transformational Optics
A beautiful approach: “Transformational optics” [ several precursors, but generalized & popularized by Ward & Pendry (1996) ] warp a ray of light …by warping space(?) [ figure: J. Pendry ] Euclidean x coordinates transformed x'(x) coordinates amazing Solutions of ordinary Euclidean Maxwell equations in x' fact: = transformed solutions from x if x' uses transformed materials ε' and μ' Maxwell’s Equations constants: ε0, μ0 = vacuum permittivity/permeability = 1 –1/2 c = vacuum speed of light = (ε0 μ0 ) = 1 ! " B = 0 Gauss: constitutive ! " D = # relations: James Clerk Maxwell #D E = D – P 1864 Ampere: ! " H = + J #t H = B – M $B Faraday: ! " E = # $t electromagnetic fields: sources: J = current density E = electric field ρ = charge density D = displacement field H = magnetic field / induction material response to fields: B = magnetic field / flux density P = polarization density M = magnetization density Constitutive relations for macroscopic linear materials P = χe E ⇒ D = (1+χe) E = ε E M = χm H B = (1+χm) H = μ H where ε = 1+χe = electric permittivity or dielectric constant µ = 1+χm = magnetic permeability εµ = (refractive index)2 Transformation-mimicking materials [ Ward & Pendry (1996) ] E(x), H(x) J–TE(x(x')), J–TH(x(x')) [ figure: J. Pendry ] Euclidean x coordinates transformed x'(x) coordinates J"JT JµJT ε(x), μ(x) " ! = , µ ! = (linear materials) det J det J J = Jacobian (Jij = ∂xi’/∂xj) (isotropic, nonmagnetic [μ=1], homogeneous materials ⇒ anisotropic, magnetic, inhomogeneous materials) an elementary derivation [ Kottke (2008) ] consider× -

Newton's Laws
Newton’s Laws First Law A body moves with constant velocity unless a net force acts on the body. Second Law The rate of change of momentum of a body is equal to the net force applied to the body. Third Law If object A exerts a force on object B, then object B exerts a force on object A. These have equal magnitude but opposite direction. Newton’s second law The second law should be familiar: F = ma where m is the inertial mass (a scalar) and a is the acceleration (a vector). Note that a is the rate of change of velocity, which is in turn the rate of change of displacement. So d d2 a = v = r dt dt2 which, in simplied notation is a = v_ = r¨ The principle of relativity The principle of relativity The laws of nature are identical in all inertial frames of reference An inertial frame of reference is one in which a freely moving body proceeds with uniform velocity. The Galilean transformation - In Newtonian mechanics, the concepts of space and time are completely separable. - Time is considered an absolute quantity which is independent of the frame of reference: t0 = t. - The laws of mechanics are invariant under a transformation of the coordinate system. u y y 0 S S 0 x x0 Consider two inertial reference frames S and S0. The frame S0 moves at a velocity u relative to the frame S along the x axis. The trans- formation of the coordinates of a point is, therefore x0 = x − ut y 0 = y z0 = z The above equations constitute a Galilean transformation u y y 0 S S 0 x x0 These equations are linear (as we would hope), so we can write the same equations for changes in each of the coordinates: ∆x0 = ∆x − u∆t ∆y 0 = ∆y ∆z0 = ∆z u y y 0 S S 0 x x0 For moving particles, we need to know how to transform velocity, v, and acceleration, a, between frames. -

Glossary "The Difference Between Genius and Stupidity Is That Genius Has Its Limits" - Albert Einstein ( 1879 - 1955 )
Relativity Science Calculator - Glossary "The difference between genius and stupidity is that genius has its limits" - Albert Einstein ( 1879 - 1955 ) Aberration [ aberration of (star)light, astronomical aberration, stellar aberration ]: An astronomical phenomenon different from the phenomenon of parallax whereby small apparent motion displacements of all fixed stars on the celestial sphere due to Earth's orbital velocity mandates that terrestrial telescopes must also be adjusted to slightly different directions as the Earth yearly transits the Sun. Stellar aberration is totally independent of a star's distance from Earth but rather depends upon the transverse velocity of an observer on Earth, all of which is unlike the phenomenon of parallax. For example, vertically falling rain upon your umbrella will appear to come from in front of you the faster you walk and hence the more you will adjust the position of the umbrella to deflect the rain. Finally, the fact that Earth does not drag with itself in its immediate vicinity any amount of aether helps dissuade the concept that indeed the aether exists. Star Aberration produces visual distortions of the spatial external ( spacetime ) world, a sort of faux spacetime curvature geometry. See: Celestial Sphere; also Parallax which is a totally different phenomenon. Absolute Motion, Time and Space by Isaac Newton: "Philosophiae Naturalis Principia Mathematica", by Isaac Newton, published July 5, 1687, translated from the original Latin by Andrew Motte ( 1729 ), as revised by Florian Cajori ( Berkeley, -

A New Cosmology, Based Upon the Hertzian Fundamental Principle of Mechanics by Pascal M
A new cosmology, based upon the Hertzian fundamental principle of mechanics by Pascal M. .Rapier Director Newtonian Science Foundation, 3154 Deseret Dr. Richmond, Calif. PRESENTADO POR EL ACADÉMICO D. JULIO PALACIOS RESUMEN Con el reciente descubrimiento de la explosión de la «estrella neutrónicaj>, y con la invalidación de la teoría de la relatividad de Einstein por el experimento de Kantor, ¡a cosmologia newtoniana adquiere capital importancia. Esta cosmología se basa en el principio fundamental de Mecánica de Hertz : Todo sistema libre, persiste r» su estado de reposo o de movimiento uniforme en el camino más corto. En consecuencia, el corrimiento hacia el rojo de las rayas espectrales resulta ser debido a una degradación de la energía, degradación que es inherente a la propa- gación de la luz, y no a un efecto de Doppler, ad hoc, como se había admitido. Ea relación entre dicho corrimiento y la luminosidad, observada en las galaxias lejanas, se deduce de dicho principio y sirve para confirmarlo. Se demuestra además que la energía que llena todo el espacio y que se atribuye a los neutrinos, es el resultado de reacciones nucleares consistentes en la emisión de partículas beta y del corrimiento hacia el rojo. Esta energía es responsable de las explosiones de las «estrellas neutrónicas». Tales explosiones sirven para recrear hidrógeno virgen a partir de los detritus estelares y para distribuirlo por todo el universo, con lo que hay una creación continua de nuevas estrellas. En consecuen- cia, dunque el universo fuese infinitamente viejo, no tiene porqué «venirse abajo». Además, la cosmología newtoniana exige que el espacio sea estable, que no se ex- panda, y que sea homogéneo, euclideo e infinito. -

Teaching and Learning Special Relativity Theory in Secondary and Lower Undergraduate Education: a Literature Review
PHYSICAL REVIEW PHYSICS EDUCATION RESEARCH 17, 023101 (2021) Teaching and learning special relativity theory in secondary and lower undergraduate education: A literature review Paul Alstein ,* Kim Krijtenburg-Lewerissa , and Wouter R. van Joolingen Freudenthal Institute, Utrecht University, P.O. Box 85170, 3508 AD Utrecht, Netherlands (Received 20 November 2020; accepted 7 June 2021; published 12 July 2021) This review presents an overview and analysis of the body of research on special relativity theory (SRT) education at the secondary and lower undergraduate level. There is currently a growing international interest in implementing SRT in pre-university education as an introduction to modern physics. For this reason, insights into learning opportunities and challenges in SRT education are needed. The field of research in SRT education is still at an early stage, especially at the level of secondary education, and there is a shortage of empirical evaluation of learning outcomes. In order to guide future research directions, there is a need for an overview and synthesis of the results reported so far. We have selected 40 articles and categorized them according to reported learning difficulties, teaching approaches, and research tools. Analysis shows that students at all educational levels experience learning difficulties with the use of frames of reference, the postulates of SRT, and relativistic effects. In the reported teaching sequences, instructional materials, and learning activities, these difficulties are approached from different angles. Some teaching approaches focus on thought experiments to express conceptual features of SRT, while others use virtual environments to provide realistic visualization of relativistic effects. From the reported teaching approaches, three learning objectives can be identified: to foster conceptual understanding, to foster understanding of the history and philosophy of science, and to gain motivation and confidence toward SRT and physics in general.