Advances in Intelligent Systems and Computing 187
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Enabling Science with Gaia Observations of Naked-Eye Stars
Enabling science with Gaia observations of naked-eye stars J. Sahlmanna,b, J. Mart´ın-Fleitasb,c, A. Morab,c, A. Abreub,d, C. M. Crowleyb,e, E. Jolietb,f aEuropean Space Agency, STScI, 3700 San Martin Drive, Baltimore, MD 21218, USA; bEuropean Space Agency, ESAC, P.O. Box 78, Villanueva de la Canada,˜ 28691 Madrid, Spain; cAurora Technology, Crown Business Centre, Heereweg 345, 2161 CA Lisse, The Netherlands; dElecnor Deimos Space, Ronda de Poniente 19, Ed. Fiteni VI, 28760 Tres Cantos, Madrid, Spain; eHE Space Operations BV, Huygensstraat 44, 2201 DK Noordwijk, The Netherlands; fCalifornia Institute of Technology, Pasadena, CA, 91125, USA ABSTRACT ESA’s Gaia space astrometry mission is performing an all-sky survey of stellar objects. At the beginning of the nominal mission in July 2014, an operation scheme was adopted that enabled Gaia to routinely acquire observations of all stars brighter than the original limit of G∼6, i.e. the naked-eye stars. Here, we describe the current status and extent of those observations and their on-ground processing. We present an overview of the data products generated for G<6 stars and the potential scientific applications. Finally, we discuss how the Gaia survey could be enhanced by further exploiting the techniques we developed. Keywords: Gaia, Astrometry, Proper motion, Parallax, Bright Stars, Extrasolar planets, CCD 1. INTRODUCTION There are about 6000 stars that can be observed with the unaided human eye. Greek astronomer Hipparchus used these stars to define the magnitude system still in use today, in which the faintest stars had an apparent visual magnitude of 6. -

Apus Constellation Visible at Latitudes Between +5° and -90°
Apus Constellation Visible at latitudes between +5° and -90°. Best visible at 21:00 (9 p.m.) during the month of July. Apus is a small constellation in the southern sky. It represents a bird-of-paradise, and its name means "without feet" in Greek because the bird-of-paradise was once wrongly believed to lack feet. First depicted on a celestial globe by Petrus Plancius in 1598, it was charted on a star atlas by Johann Bayer in his 1603 Uranometria. The French explorer and astronomer Nicolas Louis de Lacaille charted and gave the brighter stars their Bayer designations in 1756. The five brightest stars are all reddish in hue. Shading the others at apparent magnitude 3.8 is Alpha Apodis, an orange giant that has around 48 times the diameter and 928 times the luminosity of the Sun. Marginally fainter is Gamma Apodis, another ageing giant star. Delta Apodis is a double star, the two components of which are 103 arcseconds apart and visible with the naked eye. Two star systems have been found to have planets. Apus was one of twelve constellations published by Petrus Plancius from the observations of Pieter Dirkszoon Keyser and Frederick de Houtman who had sailed on the first Dutch trading expedition, known as the Eerste Schipvaart, to the East Indies. It first appeared on a 35-cm diameter celestial globe published in 1598 in Amsterdam by Plancius with Jodocus Hondius. De Houtman included it in his southern star catalogue in 1603 under the Dutch name De Paradijs Voghel, "The Bird of Paradise", and Plancius called the constellation Paradysvogel Apis Indica; the first word is Dutch for "bird of paradise". -

Naming the Extrasolar Planets
Naming the extrasolar planets W. Lyra Max Planck Institute for Astronomy, K¨onigstuhl 17, 69177, Heidelberg, Germany [email protected] Abstract and OGLE-TR-182 b, which does not help educators convey the message that these planets are quite similar to Jupiter. Extrasolar planets are not named and are referred to only In stark contrast, the sentence“planet Apollo is a gas giant by their assigned scientific designation. The reason given like Jupiter” is heavily - yet invisibly - coated with Coper- by the IAU to not name the planets is that it is consid- nicanism. ered impractical as planets are expected to be common. I One reason given by the IAU for not considering naming advance some reasons as to why this logic is flawed, and sug- the extrasolar planets is that it is a task deemed impractical. gest names for the 403 extrasolar planet candidates known One source is quoted as having said “if planets are found to as of Oct 2009. The names follow a scheme of association occur very frequently in the Universe, a system of individual with the constellation that the host star pertains to, and names for planets might well rapidly be found equally im- therefore are mostly drawn from Roman-Greek mythology. practicable as it is for stars, as planet discoveries progress.” Other mythologies may also be used given that a suitable 1. This leads to a second argument. It is indeed impractical association is established. to name all stars. But some stars are named nonetheless. In fact, all other classes of astronomical bodies are named. -

Fy10 Budget by Program
AURA/NOAO FISCAL YEAR ANNUAL REPORT FY 2010 Revised Submitted to the National Science Foundation March 16, 2011 This image, aimed toward the southern celestial pole atop the CTIO Blanco 4-m telescope, shows the Large and Small Magellanic Clouds, the Milky Way (Carinae Region) and the Coal Sack (dark area, close to the Southern Crux). The 33 “written” on the Schmidt Telescope dome using a green laser pointer during the two-minute exposure commemorates the rescue effort of 33 miners trapped for 69 days almost 700 m underground in the San Jose mine in northern Chile. The image was taken while the rescue was in progress on 13 October 2010, at 3:30 am Chilean Daylight Saving time. Image Credit: Arturo Gomez/CTIO/NOAO/AURA/NSF National Optical Astronomy Observatory Fiscal Year Annual Report for FY 2010 Revised (October 1, 2009 – September 30, 2010) Submitted to the National Science Foundation Pursuant to Cooperative Support Agreement No. AST-0950945 March 16, 2011 Table of Contents MISSION SYNOPSIS ............................................................................................................ IV 1 EXECUTIVE SUMMARY ................................................................................................ 1 2 NOAO ACCOMPLISHMENTS ....................................................................................... 2 2.1 Achievements ..................................................................................................... 2 2.2 Status of Vision and Goals ................................................................................ -
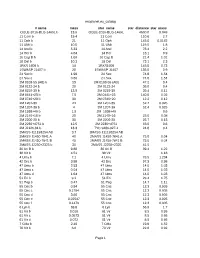
Exoplanet.Eu Catalog Page 1 # Name Mass Star Name
exoplanet.eu_catalog # name mass star_name star_distance star_mass OGLE-2016-BLG-1469L b 13.6 OGLE-2016-BLG-1469L 4500.0 0.048 11 Com b 19.4 11 Com 110.6 2.7 11 Oph b 21 11 Oph 145.0 0.0162 11 UMi b 10.5 11 UMi 119.5 1.8 14 And b 5.33 14 And 76.4 2.2 14 Her b 4.64 14 Her 18.1 0.9 16 Cyg B b 1.68 16 Cyg B 21.4 1.01 18 Del b 10.3 18 Del 73.1 2.3 1RXS 1609 b 14 1RXS1609 145.0 0.73 1SWASP J1407 b 20 1SWASP J1407 133.0 0.9 24 Sex b 1.99 24 Sex 74.8 1.54 24 Sex c 0.86 24 Sex 74.8 1.54 2M 0103-55 (AB) b 13 2M 0103-55 (AB) 47.2 0.4 2M 0122-24 b 20 2M 0122-24 36.0 0.4 2M 0219-39 b 13.9 2M 0219-39 39.4 0.11 2M 0441+23 b 7.5 2M 0441+23 140.0 0.02 2M 0746+20 b 30 2M 0746+20 12.2 0.12 2M 1207-39 24 2M 1207-39 52.4 0.025 2M 1207-39 b 4 2M 1207-39 52.4 0.025 2M 1938+46 b 1.9 2M 1938+46 0.6 2M 2140+16 b 20 2M 2140+16 25.0 0.08 2M 2206-20 b 30 2M 2206-20 26.7 0.13 2M 2236+4751 b 12.5 2M 2236+4751 63.0 0.6 2M J2126-81 b 13.3 TYC 9486-927-1 24.8 0.4 2MASS J11193254 AB 3.7 2MASS J11193254 AB 2MASS J1450-7841 A 40 2MASS J1450-7841 A 75.0 0.04 2MASS J1450-7841 B 40 2MASS J1450-7841 B 75.0 0.04 2MASS J2250+2325 b 30 2MASS J2250+2325 41.5 30 Ari B b 9.88 30 Ari B 39.4 1.22 38 Vir b 4.51 38 Vir 1.18 4 Uma b 7.1 4 Uma 78.5 1.234 42 Dra b 3.88 42 Dra 97.3 0.98 47 Uma b 2.53 47 Uma 14.0 1.03 47 Uma c 0.54 47 Uma 14.0 1.03 47 Uma d 1.64 47 Uma 14.0 1.03 51 Eri b 9.1 51 Eri 29.4 1.75 51 Peg b 0.47 51 Peg 14.7 1.11 55 Cnc b 0.84 55 Cnc 12.3 0.905 55 Cnc c 0.1784 55 Cnc 12.3 0.905 55 Cnc d 3.86 55 Cnc 12.3 0.905 55 Cnc e 0.02547 55 Cnc 12.3 0.905 55 Cnc f 0.1479 55 -

A Search for Variability and Transit Signatures In
A SEARCH FOR VARIABILITY AND TRANSIT SIGNATURES IN HIPPARCOS PHOTOMETRIC DATA A thesis presented to the faculty of 3 ^ San Francisco State University Zo\% In partial fulfilment of W* The Requirements for The Degree Master of Science In Physics: Astronomy by Badrinath Thirumalachari San JVancisco, California December 2018 Copyright by Badrinath Thirumalachari 2018 CERTIFICATION OF APPROVAL I certify that I have read A SEARCH FOR VARIABILITY AND TRANSIT SIGNATURES IN HIPPARCOS PHOTOMETRIC DATA by Badrinath Thirumalachari and that in my opinion this work meets the criteria for approving a thesis submitted in partial fulfillment of the requirements for the degree: Master of Science in Physics: Astronomy at San Francisco State University. fov- Dr. Stephen Kane, Ph.D. Astrophysics Associate Professor of Planetary Astrophysics Dr. Uo&eph Barranco, Ph.D. .%trtJphysics Chairfe Associate Professor of Physics K + A Q , L a . Dr. Ron Marzke, Ph.D. Astronomy Assoc. Dean of College of Science & Engineering A SEARCH FOR VARIABILITY AND TRANSIT SIGNATURES IN HIPPARCOS PHOTOMETRIC DATA Badrinath Thirumalachari San Francisco State University 2018 The study and characterization of exoplanets has picked up pace rapidly over the past few decades with the invention of newer techniques and instruments. Detecting transits in stellar photometric data around stars already known to harbor exoplanets is crucial for exoplanet characterization. Due to these advancements we now have oceans of data and coming up with an automated way of performing exoplanet characterization is a challenge. In this thesis I describe one such method to search for transits in Hipparcos dataset containing photometric data for over 118000 stars. The radial velocity method has discovered a lot of planets around bright host stars and a follow up transit detection will give us the density of the exoplanet. -

ON the INCLINATION DEPENDENCE of EXOPLANET PHASE SIGNATURES Stephen R
The Astrophysical Journal, 729:74 (6pp), 2011 March 1 doi:10.1088/0004-637X/729/1/74 C 2011. The American Astronomical Society. All rights reserved. Printed in the U.S.A. ON THE INCLINATION DEPENDENCE OF EXOPLANET PHASE SIGNATURES Stephen R. Kane and Dawn M. Gelino NASA Exoplanet Science Institute, Caltech, MS 100-22, 770 South Wilson Avenue, Pasadena, CA 91125, USA; [email protected] Received 2011 December 2; accepted 2011 January 5; published 2011 February 10 ABSTRACT Improved photometric sensitivity from space-based telescopes has enabled the detection of phase variations for a small sample of hot Jupiters. However, exoplanets in highly eccentric orbits present unique opportunities to study the effects of drastically changing incident flux on the upper atmospheres of giant planets. Here we expand upon previous studies of phase functions for these planets at optical wavelengths by investigating the effects of orbital inclination on the flux ratio as it interacts with the other effects induced by orbital eccentricity. We determine optimal orbital inclinations for maximum flux ratios and combine these calculations with those of projected separation for application to coronagraphic observations. These are applied to several of the known exoplanets which may serve as potential targets in current and future coronagraph experiments. Key words: planetary systems – techniques: photometric 1. INTRODUCTION and inclination for a given eccentricity. We further calculate projected separations at apastron as a function of inclination The changing phases of an exoplanet as it orbits the host star and determine their correspondence with maximum flux ratio have long been considered as a means for their detection and locations. -

IAU Division C Working Group on Star Names 2019 Annual Report
IAU Division C Working Group on Star Names 2019 Annual Report Eric Mamajek (chair, USA) WG Members: Juan Antonio Belmote Avilés (Spain), Sze-leung Cheung (Thailand), Beatriz García (Argentina), Steven Gullberg (USA), Duane Hamacher (Australia), Susanne M. Hoffmann (Germany), Alejandro López (Argentina), Javier Mejuto (Honduras), Thierry Montmerle (France), Jay Pasachoff (USA), Ian Ridpath (UK), Clive Ruggles (UK), B.S. Shylaja (India), Robert van Gent (Netherlands), Hitoshi Yamaoka (Japan) WG Associates: Danielle Adams (USA), Yunli Shi (China), Doris Vickers (Austria) WGSN Website: https://www.iau.org/science/scientific_bodies/working_groups/280/ WGSN Email: [email protected] The Working Group on Star Names (WGSN) consists of an international group of astronomers with expertise in stellar astronomy, astronomical history, and cultural astronomy who research and catalog proper names for stars for use by the international astronomical community, and also to aid the recognition and preservation of intangible astronomical heritage. The Terms of Reference and membership for WG Star Names (WGSN) are provided at the IAU website: https://www.iau.org/science/scientific_bodies/working_groups/280/. WGSN was re-proposed to Division C and was approved in April 2019 as a functional WG whose scope extends beyond the normal 3-year cycle of IAU working groups. The WGSN was specifically called out on p. 22 of IAU Strategic Plan 2020-2030: “The IAU serves as the internationally recognised authority for assigning designations to celestial bodies and their surface features. To do so, the IAU has a number of Working Groups on various topics, most notably on the nomenclature of small bodies in the Solar System and planetary systems under Division F and on Star Names under Division C.” WGSN continues its long term activity of researching cultural astronomy literature for star names, and researching etymologies with the goal of adding this information to the WGSN’s online materials. -

Mètodes De Detecció I Anàlisi D'exoplanetes
MÈTODES DE DETECCIÓ I ANÀLISI D’EXOPLANETES Rubén Soussé Villa 2n de Batxillerat Tutora: Dolors Romero IES XXV Olimpíada 13/1/2011 Mètodes de detecció i anàlisi d’exoplanetes . Índex - Introducció ............................................................................................. 5 [ Marc Teòric ] 1. L’Univers ............................................................................................... 6 1.1 Les estrelles .................................................................................. 6 1.1.1 Vida de les estrelles .............................................................. 7 1.1.2 Classes espectrals .................................................................9 1.1.3 Magnitud ........................................................................... 9 1.2 Sistemes planetaris: El Sistema Solar .............................................. 10 1.2.1 Formació ......................................................................... 11 1.2.2 Planetes .......................................................................... 13 2. Planetes extrasolars ............................................................................ 19 2.1 Denominació .............................................................................. 19 2.2 Història dels exoplanetes .............................................................. 20 2.3 Mètodes per detectar-los i saber-ne les característiques ..................... 26 2.3.1 Oscil·lació Doppler ........................................................... 27 2.3.2 Trànsits -

2017 Publication Year 2020-08-04T11:06:43Z Acceptance
Publication Year 2017 Acceptance in OA@INAF 2020-08-04T11:06:43Z Title Searching for chemical signatures of brown dwarf formation Authors MALDONADO PRADO, Jesus; Villaver, E. DOI 10.1051/0004-6361/201630120 Handle http://hdl.handle.net/20.500.12386/26692 Journal ASTRONOMY & ASTROPHYSICS Number 602 A&A 602, A38 (2017) DOI: 10.1051/0004-6361/201630120 Astronomy c ESO 2017 & Astrophysics Searching for chemical signatures of brown dwarf formation? J. Maldonado1 and E. Villaver2 1 INAF–Osservatorio Astronomico di Palermo, Piazza del Parlamento 1, 90134 Palermo, Italy e-mail: [email protected] 2 Universidad Autónoma de Madrid, Dpto. Física Teórica, Módulo 15, Facultad de Ciencias, Campus de Cantoblanco, 28049 Madrid, Spain Received 22 November 2016 / Accepted 9 February 2017 ABSTRACT Context. Recent studies have shown that close-in brown dwarfs in the mass range 35–55 MJup are almost depleted as companions to stars, suggesting that objects with masses above and below this gap might have di↵erent formation mechanisms. Aims. We aim to test whether stars harbouring massive brown dwarfs and stars with low-mass brown dwarfs show any chemical peculiarity that could be related to di↵erent formation processes. Methods. Our methodology is based on the analysis of high-resolution échelle spectra (R 57 000) from 2–3 m class telescopes. We determine the fundamental stellar parameters, as well as individual abundances of C, O,⇠ Na, Mg, Al, Si, S, Ca, Sc, Ti, V, Cr, Mn, Co, Ni, and Zn for a large sample of stars known to have a substellar companion in the brown dwarf regime. -

Exoplanet.Eu Catalog Page 1 Star Distance Star Name Star Mass
exoplanet.eu_catalog star_distance star_name star_mass Planet name mass 1.3 Proxima Centauri 0.120 Proxima Cen b 0.004 1.3 alpha Cen B 0.934 alf Cen B b 0.004 2.3 WISE 0855-0714 WISE 0855-0714 6.000 2.6 Lalande 21185 0.460 Lalande 21185 b 0.012 3.2 eps Eridani 0.830 eps Eridani b 3.090 3.4 Ross 128 0.168 Ross 128 b 0.004 3.6 GJ 15 A 0.375 GJ 15 A b 0.017 3.6 YZ Cet 0.130 YZ Cet d 0.004 3.6 YZ Cet 0.130 YZ Cet c 0.003 3.6 YZ Cet 0.130 YZ Cet b 0.002 3.6 eps Ind A 0.762 eps Ind A b 2.710 3.7 tau Cet 0.783 tau Cet e 0.012 3.7 tau Cet 0.783 tau Cet f 0.012 3.7 tau Cet 0.783 tau Cet h 0.006 3.7 tau Cet 0.783 tau Cet g 0.006 3.8 GJ 273 0.290 GJ 273 b 0.009 3.8 GJ 273 0.290 GJ 273 c 0.004 3.9 Kapteyn's 0.281 Kapteyn's c 0.022 3.9 Kapteyn's 0.281 Kapteyn's b 0.015 4.3 Wolf 1061 0.250 Wolf 1061 d 0.024 4.3 Wolf 1061 0.250 Wolf 1061 c 0.011 4.3 Wolf 1061 0.250 Wolf 1061 b 0.006 4.5 GJ 687 0.413 GJ 687 b 0.058 4.5 GJ 674 0.350 GJ 674 b 0.040 4.7 GJ 876 0.334 GJ 876 b 1.938 4.7 GJ 876 0.334 GJ 876 c 0.856 4.7 GJ 876 0.334 GJ 876 e 0.045 4.7 GJ 876 0.334 GJ 876 d 0.022 4.9 GJ 832 0.450 GJ 832 b 0.689 4.9 GJ 832 0.450 GJ 832 c 0.016 5.9 GJ 570 ABC 0.802 GJ 570 D 42.500 6.0 SIMP0136+0933 SIMP0136+0933 12.700 6.1 HD 20794 0.813 HD 20794 e 0.015 6.1 HD 20794 0.813 HD 20794 d 0.011 6.1 HD 20794 0.813 HD 20794 b 0.009 6.2 GJ 581 0.310 GJ 581 b 0.050 6.2 GJ 581 0.310 GJ 581 c 0.017 6.2 GJ 581 0.310 GJ 581 e 0.006 6.5 GJ 625 0.300 GJ 625 b 0.010 6.6 HD 219134 HD 219134 h 0.280 6.6 HD 219134 HD 219134 e 0.200 6.6 HD 219134 HD 219134 d 0.067 6.6 HD 219134 HD -

Fang Family San Francisco Examiner Photograph Archive Negative Files, Circa 1930-2000, Circa 1930-2000
http://oac.cdlib.org/findaid/ark:/13030/hb6t1nb85b No online items Finding Aid to the Fang family San Francisco examiner photograph archive negative files, circa 1930-2000, circa 1930-2000 Bancroft Library staff The Bancroft Library University of California, Berkeley Berkeley, CA 94720-6000 Phone: (510) 642-6481 Fax: (510) 642-7589 Email: [email protected] URL: http://bancroft.berkeley.edu/ © 2010 The Regents of the University of California. All rights reserved. Finding Aid to the Fang family San BANC PIC 2006.029--NEG 1 Francisco examiner photograph archive negative files, circa 1930-... Finding Aid to the Fang family San Francisco examiner photograph archive negative files, circa 1930-2000, circa 1930-2000 Collection number: BANC PIC 2006.029--NEG The Bancroft Library University of California, Berkeley Berkeley, CA 94720-6000 Phone: (510) 642-6481 Fax: (510) 642-7589 Email: [email protected] URL: http://bancroft.berkeley.edu/ Finding Aid Author(s): Bancroft Library staff Finding Aid Encoded By: GenX © 2011 The Regents of the University of California. All rights reserved. Collection Summary Collection Title: Fang family San Francisco examiner photograph archive negative files Date (inclusive): circa 1930-2000 Collection Number: BANC PIC 2006.029--NEG Creator: San Francisco Examiner (Firm) Extent: 3,200 boxes (ca. 3,600,000 photographic negatives); safety film, nitrate film, and glass : various film sizes, chiefly 4 x 5 in. and 35mm. Repository: The Bancroft Library. University of California, Berkeley Berkeley, CA 94720-6000 Phone: (510) 642-6481 Fax: (510) 642-7589 Email: [email protected] URL: http://bancroft.berkeley.edu/ Abstract: Local news photographs taken by staff of the Examiner, a major San Francisco daily newspaper.