Convolution (Linear Filtering) Question: Noise Reduction • Given a Camera and a Still Scene, How Can You Reduce Noise?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Synthesizing Images of Humans in Unseen Poses
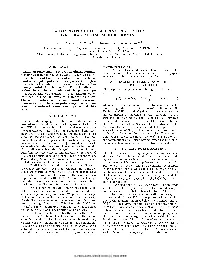
Synthesizing Images of Humans in Unseen Poses Guha Balakrishnan Amy Zhao Adrian V. Dalca Fredo Durand MIT MIT MIT and MGH MIT [email protected] [email protected] [email protected] [email protected] John Guttag MIT [email protected] Abstract We address the computational problem of novel human pose synthesis. Given an image of a person and a desired pose, we produce a depiction of that person in that pose, re- taining the appearance of both the person and background. We present a modular generative neural network that syn- Source Image Target Pose Synthesized Image thesizes unseen poses using training pairs of images and poses taken from human action videos. Our network sepa- Figure 1. Our method takes an input image along with a desired target pose, and automatically synthesizes a new image depicting rates a scene into different body part and background lay- the person in that pose. We retain the person’s appearance as well ers, moves body parts to new locations and refines their as filling in appropriate background textures. appearances, and composites the new foreground with a hole-filled background. These subtasks, implemented with separate modules, are trained jointly using only a single part details consistent with the new pose. Differences in target image as a supervised label. We use an adversarial poses can cause complex changes in the image space, in- discriminator to force our network to synthesize realistic volving several moving parts and self-occlusions. Subtle details conditioned on pose. We demonstrate image syn- details such as shading and edges should perceptually agree thesis results on three action classes: golf, yoga/workouts with the body’s configuration. -

Deblured Gaussian Blurred Images
JOURNAL OF COMPUTING, VOLUME 2, ISSUE 4, APRIL 2010, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/ 33 Deblured Gaussian Blurred Images Mr. Salem Saleh Al-amri1, Dr. N.V. Kalyankar2 and Dr. Khamitkar S.D 3 Abstract—This paper attempts to undertake the study of Restored Gaussian Blurred Images. by using four types of techniques of deblurring image as Wiener filter, Regularized filter ,Lucy Richardson deconvlutin algorithm and Blind deconvlution algorithm with an information of the Point Spread Function (PSF) corrupted blurred image with Different values of Size and Alfa and then corrupted by Gaussian noise. The same is applied to the remote sensing image and they are compared with one another, So as to choose the base technique for restored or deblurring image.This paper also attempts to undertake the study of restored Gaussian blurred image with no any information about the Point Spread Function (PSF) by using same four techniques after execute the guess of the PSF, the number of iterations and the weight threshold of it. To choose the base guesses for restored or deblurring image of this techniques. Index Terms—Blur/Types of Blur/PSF; Deblurring/Deblurring Methods. —————————— —————————— 1 INTRODUCTION he restoration image is very important process in the image entire image. Tprocessing to restor the image by using the image processing This type of blurring can be distribution in horizontal and vertical techniques to easily understand this image without any artifacts direction and can be circular averaging by radius -

Snakes, Shapes, and Gradient Vector Flow
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 3, MARCH 1998 359 Snakes, Shapes, and Gradient Vector Flow Chenyang Xu, Student Member, IEEE, and Jerry L. Prince, Senior Member, IEEE Abstract—Snakes, or active contours, are used extensively in There are two key difficulties with parametric active contour computer vision and image processing applications, particularly algorithms. First, the initial contour must, in general, be to locate object boundaries. Problems associated with initializa- close to the true boundary or else it will likely converge tion and poor convergence to boundary concavities, however, have limited their utility. This paper presents a new external force to the wrong result. Several methods have been proposed to for active contours, largely solving both problems. This external address this problem including multiresolution methods [11], force, which we call gradient vector flow (GVF), is computed pressure forces [10], and distance potentials [12]. The basic as a diffusion of the gradient vectors of a gray-level or binary idea is to increase the capture range of the external force edge map derived from the image. It differs fundamentally from fields and to guide the contour toward the desired boundary. traditional snake external forces in that it cannot be written as the negative gradient of a potential function, and the corresponding The second problem is that active contours have difficulties snake is formulated directly from a force balance condition rather progressing into boundary concavities [13], [14]. There is no than a variational formulation. Using several two-dimensional satisfactory solution to this problem, although pressure forces (2-D) examples and one three-dimensional (3-D) example, we [10], control points [13], domain-adaptivity [15], directional show that GVF has a large capture range and is able to move snakes into boundary concavities. -

Moving Average Filters
CHAPTER 15 Moving Average Filters The moving average is the most common filter in DSP, mainly because it is the easiest digital filter to understand and use. In spite of its simplicity, the moving average filter is optimal for a common task: reducing random noise while retaining a sharp step response. This makes it the premier filter for time domain encoded signals. However, the moving average is the worst filter for frequency domain encoded signals, with little ability to separate one band of frequencies from another. Relatives of the moving average filter include the Gaussian, Blackman, and multiple- pass moving average. These have slightly better performance in the frequency domain, at the expense of increased computation time. Implementation by Convolution As the name implies, the moving average filter operates by averaging a number of points from the input signal to produce each point in the output signal. In equation form, this is written: EQUATION 15-1 Equation of the moving average filter. In M &1 this equation, x[ ] is the input signal, y[ ] is ' 1 % y[i] j x [i j ] the output signal, and M is the number of M j'0 points used in the moving average. This equation only uses points on one side of the output sample being calculated. Where x[ ] is the input signal, y[ ] is the output signal, and M is the number of points in the average. For example, in a 5 point moving average filter, point 80 in the output signal is given by: x [80] % x [81] % x [82] % x [83] % x [84] y [80] ' 5 277 278 The Scientist and Engineer's Guide to Digital Signal Processing As an alternative, the group of points from the input signal can be chosen symmetrically around the output point: x[78] % x[79] % x[80] % x[81] % x[82] y[80] ' 5 This corresponds to changing the summation in Eq. -

Memristor-Based Approximated Computation
Memristor-based Approximated Computation Boxun Li1, Yi Shan1, Miao Hu2, Yu Wang1, Yiran Chen2, Huazhong Yang1 1Dept. of E.E., TNList, Tsinghua University, Beijing, China 2Dept. of E.C.E., University of Pittsburgh, Pittsburgh, USA 1 Email: [email protected] Abstract—The cessation of Moore’s Law has limited further architectures, which not only provide a promising hardware improvements in power efficiency. In recent years, the physical solution to neuromorphic system but also help drastically close realization of the memristor has demonstrated a promising the gap of power efficiency between computing systems and solution to ultra-integrated hardware realization of neural net- works, which can be leveraged for better performance and the brain. The memristor is one of those promising devices. power efficiency gains. In this work, we introduce a power The memristor is able to support a large number of signal efficient framework for approximated computations by taking connections within a small footprint by taking the advantage advantage of the memristor-based multilayer neural networks. of the ultra-integration density [7]. And most importantly, A programmable memristor approximated computation unit the nonvolatile feature that the state of the memristor could (Memristor ACU) is introduced first to accelerate approximated computation and a memristor-based approximated computation be tuned by the current passing through itself makes the framework with scalability is proposed on top of the Memristor memristor a potential, perhaps even the best, device to realize ACU. We also introduce a parameter configuration algorithm of neuromorphic computing systems with picojoule level energy the Memristor ACU and a feedback state tuning circuit to pro- consumption [8], [9]. -

A Survey of Autonomous Driving: Common Practices and Emerging Technologies
Accepted March 22, 2020 Digital Object Identifier 10.1109/ACCESS.2020.2983149 A Survey of Autonomous Driving: Common Practices and Emerging Technologies EKIM YURTSEVER1, (Member, IEEE), JACOB LAMBERT 1, ALEXANDER CARBALLO 1, (Member, IEEE), AND KAZUYA TAKEDA 1, 2, (Senior Member, IEEE) 1Nagoya University, Furo-cho, Nagoya, 464-8603, Japan 2Tier4 Inc. Nagoya, Japan Corresponding author: Ekim Yurtsever (e-mail: [email protected]). ABSTRACT Automated driving systems (ADSs) promise a safe, comfortable and efficient driving experience. However, fatalities involving vehicles equipped with ADSs are on the rise. The full potential of ADSs cannot be realized unless the robustness of state-of-the-art is improved further. This paper discusses unsolved problems and surveys the technical aspect of automated driving. Studies regarding present challenges, high- level system architectures, emerging methodologies and core functions including localization, mapping, perception, planning, and human machine interfaces, were thoroughly reviewed. Furthermore, many state- of-the-art algorithms were implemented and compared on our own platform in a real-world driving setting. The paper concludes with an overview of available datasets and tools for ADS development. INDEX TERMS Autonomous Vehicles, Control, Robotics, Automation, Intelligent Vehicles, Intelligent Transportation Systems I. INTRODUCTION necessary here. CCORDING to a recent technical report by the Eureka Project PROMETHEUS [11] was carried out in A National Highway Traffic Safety Administration Europe between 1987-1995, and it was one of the earliest (NHTSA), 94% of road accidents are caused by human major automated driving studies. The project led to the errors [1]. Against this backdrop, Automated Driving Sys- development of VITA II by Daimler-Benz, which succeeded tems (ADSs) are being developed with the promise of in automatically driving on highways [12]. -

Comparative Analysis of Gaussian Filter with Wavelet Denoising for Various Noises Present in Images
ISSN (Print) : 0974-6846 Indian Journal of Science and Technology, Vol 9(47), DOI: 10.17485/ijst/2016/v9i47/106843, December 2016 ISSN (Online) : 0974-5645 Comparative Analysis of Gaussian Filter with Wavelet Denoising for Various Noises Present in Images Amanjot Singh1,2* and Jagroop Singh3 1I.K.G. P.T.U., Jalandhar – 144603,Punjab, India; 2School of Electronics and Electrical Engineering, Lovely Professional University, Phagwara - 144411, Punjab, India; [email protected] 3Department of Electronics and Communication Engineering, DAVIET, Jalandhar – 144008, Punjab, India; [email protected] Abstract Objectives: This paper is providing a comparative performance analysis of wavelet denoising with Gaussian filter applied variouson images noises contaminated usually present with various in images. noises. Wavelet Gaussian transform filter is ais basic used filter to convert used in the image images processing. to wavelet Its response domain. isBased varying on with its kernel sizes that have also been shown in analysis. Wavelet based de-noisingMethods/Analysis: is also one of the way of removing thresholding operations in wavelet domain noise could be removed from images. In this paper, image quality matrices like PSNR andFindings MSE have been compared for the various types of noises in images for different denoising methods. Moreover, the behavior of different methods for image denoising have been graphically shown in paper with MATLAB based simulations. : In the end wavelet based de-noising methods has been compared with Gaussian basedKeywords: filter. The Denoising, paper provides Gaussian a review Filter, MSE,of filters PSNR, and SNR, their Thresholding, denoising analysis Wavelet under Transform different noise conditions. 1. Introduction is of bell shaped. -

A Comparative Study of Different Noise Filtering Techniques in Digital Images
International Journal of Engineering Research and General Science Volume 3, Issue 5, September-October, 2015 ISSN 2091-2730 A COMPARATIVE STUDY OF DIFFERENT NOISE FILTERING TECHNIQUES IN DIGITAL IMAGES Sanjib Das1, Jonti Saikia2, Soumita Das3 and Nural Goni4 1Deptt. of IT & Mathematics,ICFAI University Nagaland, Dimapur, 797112, India, [email protected] 2Service Engineer, Indian export & import office, Shillong- 793003, Meghalaya, India, [email protected] 3Department of IT, School of Technology, NEHU, Shillong-22, Meghalaya, India, [email protected] 4Department of IT, School of Technology, NEHU, Shillong-22, Meghalaya, India, [email protected] Abstract: Although various solutions are available for de-noising them, a detail study of the research is required in order to design a filter which will fulfil the desire aspects along with handling most of the image filtering issues. In this paper we want to present some of the most commonly used noise filtering techniques namely: Median filter, Gaussian filter, Kuan filter, Morphological filter, Homomorphic Filter, Bilateral Filter and wavelet filter. Median filter is used for reducing the amount of intensity variation from one pixel to another pixel. Gaussian filter is a smoothing filter in the 2D convolution operation that is used to remove noise and blur from image. Kuan filtering technique transforms multiplicative noise model into additive noise model. Morphological filter is defined as increasing idempotent operators and their laws of composition are proved. Homomorphic Filter normalizes the brightness across an image and increases contrast. Bilateral Filter is a non-linear edge preserving and noise reducing smoothing filter for images. Wavelet transform can be applied to image de-noising and it has been extremely successful. -
MPA15-16 a Baseband Pulse Shaping Filter for Gaussian Minimum Shift Keying
A BASEBAND PULSE SHAPING FILTER FOR GAUSSIAN MINIMUM SHIFT KEYING 1 2 3 3 N. Krishnapura , S. Pavan , C. Mathiazhagan ,B.Ramamurthi 1 Department of Electrical Engineering, Columbia University, New York, NY 10027, USA 2 Texas Instruments, Edison, NJ 08837, USA 3 Department of Electrical Engineering, Indian Institute of Technology, Chennai, 600036, India Email: [email protected] measurement results. ABSTRACT A quadrature mo dulation scheme to realize the Gaussian pulse shaping is used in digital commu- same function as Fig. 1 can be derived. In this pap er, nication systems like DECT, GSM, WLAN to min- we consider only the scheme shown in Fig. 1. imize the out of band sp ectral energy. The base- band rectangular pulse stream is passed through a 2. GAUSSIAN FREQUENCY SHIFT lter with a Gaussian impulse resp onse b efore fre- KEYING GFSK quency mo dulating the carrier. Traditionally this The output of the system shown in Fig. 1 can b e describ ed is done by storing the values of the pulse shap e by in a ROM and converting it to an analog wave- Z t form with a DAC followed by a smo othing lter. g d 1 y t = cos 2f t +2k c f This pap er explores a fully analog implementation 1 of an integrated Gaussian pulse shap er, which can where f is the unmo dulated carrier frequency, k is the c f result in a reduced power consumption and chip mo dulating index k =0:25 for Gaussian Minimum Shift f area. Keying|GMSK[1] and g denotes the convolution of the rectangular bit stream bt with values in f1; 1g 1. -
CSE 152: Computer Vision Manmohan Chandraker
CSE 152: Computer Vision Manmohan Chandraker Lecture 15: Optimization in CNNs Recap Engineered against learned features Label Convolutional filters are trained in a Dense supervised manner by back-propagating classification error Dense Dense Convolution + pool Label Convolution + pool Classifier Convolution + pool Pooling Convolution + pool Feature extraction Convolution + pool Image Image Jia-Bin Huang and Derek Hoiem, UIUC Two-layer perceptron network Slide credit: Pieter Abeel and Dan Klein Neural networks Non-linearity Activation functions Multi-layer neural network From fully connected to convolutional networks next layer image Convolutional layer Slide: Lazebnik Spatial filtering is convolution Convolutional Neural Networks [Slides credit: Efstratios Gavves] 2D spatial filters Filters over the whole image Weight sharing Insight: Images have similar features at various spatial locations! Key operations in a CNN Feature maps Spatial pooling Non-linearity Convolution (Learned) . Input Image Input Feature Map Source: R. Fergus, Y. LeCun Slide: Lazebnik Convolution as a feature extractor Key operations in a CNN Feature maps Rectified Linear Unit (ReLU) Spatial pooling Non-linearity Convolution (Learned) Input Image Source: R. Fergus, Y. LeCun Slide: Lazebnik Key operations in a CNN Feature maps Spatial pooling Max Non-linearity Convolution (Learned) Input Image Source: R. Fergus, Y. LeCun Slide: Lazebnik Pooling operations • Aggregate multiple values into a single value • Invariance to small transformations • Keep only most important information for next layer • Reduces the size of the next layer • Fewer parameters, faster computations • Observe larger receptive field in next layer • Hierarchically extract more abstract features Key operations in a CNN Feature maps Spatial pooling Non-linearity Convolution (Learned) . Input Image Input Feature Map Source: R. -

1 Convolution
CS1114 Section 6: Convolution February 27th, 2013 1 Convolution Convolution is an important operation in signal and image processing. Convolution op- erates on two signals (in 1D) or two images (in 2D): you can think of one as the \input" signal (or image), and the other (called the kernel) as a “filter” on the input image, pro- ducing an output image (so convolution takes two images as input and produces a third as output). Convolution is an incredibly important concept in many areas of math and engineering (including computer vision, as we'll see later). Definition. Let's start with 1D convolution (a 1D \image," is also known as a signal, and can be represented by a regular 1D vector in Matlab). Let's call our input vector f and our kernel g, and say that f has length n, and g has length m. The convolution f ∗ g of f and g is defined as: m X (f ∗ g)(i) = g(j) · f(i − j + m=2) j=1 One way to think of this operation is that we're sliding the kernel over the input image. For each position of the kernel, we multiply the overlapping values of the kernel and image together, and add up the results. This sum of products will be the value of the output image at the point in the input image where the kernel is centered. Let's look at a simple example. Suppose our input 1D image is: f = 10 50 60 10 20 40 30 and our kernel is: g = 1=3 1=3 1=3 Let's call the output image h. -

Good Colour Maps: How to Design Them
Good Colour Maps: How to Design Them Peter Kovesi Centre for Exploration Targeting School of Earth and Environment The University of Western Australia Crawley, Western Australia, 6009 [email protected] September 2015 Abstract Many colour maps provided by vendors have highly uneven percep- tual contrast over their range. It is not uncommon for colour maps to have perceptual flat spots that can hide a feature as large as one tenth of the total data range. Colour maps may also have perceptual discon- tinuities that induce the appearance of false features. Previous work in the design of perceptually uniform colour maps has mostly failed to recognise that CIELAB space is only designed to be perceptually uniform at very low spatial frequencies. The most important factor in designing a colour map is to ensure that the magnitude of the incre- mental change in perceptual lightness of the colours is uniform. The specific requirements for linear, diverging, rainbow and cyclic colour maps are developed in detail. To support this work two test images for evaluating colour maps are presented. The use of colour maps in combination with relief shading is considered and the conditions under which colour can enhance or disrupt relief shading are identified. Fi- nally, a set of new basis colours for the construction of ternary images arXiv:1509.03700v1 [cs.GR] 12 Sep 2015 are presented. Unlike the RGB primaries these basis colours produce images whereby the salience of structures are consistent irrespective of the assignment of basis colours to data channels. 1 Introduction A colour map can be thought of as a line or curve drawn through a three dimensional colour space.